О)
со
Изобретение относится к судовой автоматике, в частности к системам управления курсом сулна.
Известен стенд для регулировки
и испытаний системы управления кур.сом судна, содержащий сельсин-прием
ник .гирокомпаса, кинематически связанный через механический дифференциал со штурвалом и датчиками курса, выходы которых электрически соединены соответс венно с входами блоков коррекции, причем выходы датчиков курса, блоков коррекции и датчика обратной связи Соединены соответственно с входами усилителей, подключенных к соответствующим исполнительным механизмам С Однако стенд не обеспечивает возможности регулировки и испытаний системы управления с параметрами рулевой машины, близкими к реальным усло
ВИЯМ.
Цель изобретения - повышение точности регулирования и приближения исП1лтаний системы к реалькьлм условиям.
Для достижения цели стенд Jдля регулировки и испытаний системы управления курсом судна, содержащий сельсин-приемник гирокомпаса, кинематически связанный через механический дифференциал со штурвалом и датчиками курса, выходы которых электрически соединены соответственно с входами блоков коррекции, причем выходы датчиков курса, блрков коррекции и датчика обратной связи соединены соответственно с входами усилителей, подключенных к соответствующим исполнительным механизмам, снабжен датчиком синусоидальных колебаний и задатчиком угловой скорости, электрически подключенными через переключатель к сельсин-приемнику гирокомпаса, а также подключенным к входу датчика обратной связи механическим дифференциалом, механическими интеграторами и двигателями, каждый из KOToptux соединен с одним из механических интеграторов, связанных входом с соответствующим исполнительным механизмом,а выходом - с механически дифференциалом,
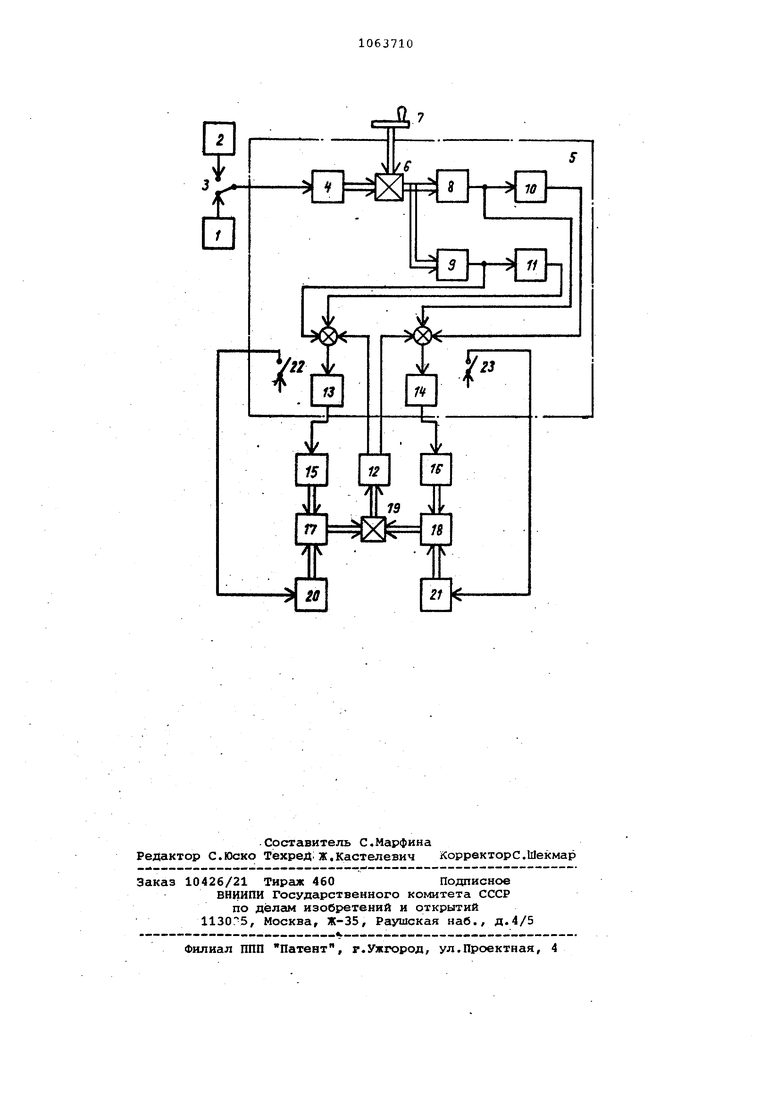
На чертеже представлена функциональная схема стенда.
Датчик, 1 синусоидальных колебаний и датчик 2 заданной угловой скорости .через переключатель 3 электрически саязаны с сельсином-приемником 4 пульта 5 управления. Сельсин-приемник 4 через механический дифференциал 6 связан со штурвалом7 и датчиками 8 и 9 курса, которые электрически связаны с входами блоков 10 и 11 коррекции. Выходщ датчиков 8 и 9 курса, блоков 10 и 11 коррекции и выходы датчика 12 обратной связи соединены с входами усилителей 13 и 14, Выходы усилителей 13 и 14 электрически связаны с исполнительными механизмами 15 и 16f которые кинематически связаны с входами механических интеграторов 17 и 18, Выходы механических интеграторов 17 и 18 через механический дифференциал 19 связаны с датчиком
12обратной связи, а двипатели 20 и 21 механических интеграторов через переключатели 22 и 23 электрически связаны с пультом 5 управления.
Стенд работает следующим образом.
Замкнув выключатель 22 (231 подают питание на двигатель 20 (21) механического интегратора 17(18/ и на элементы пульта 5 управления. Сигнал от датчика 1 синусоидальных колебаний или датчику 2 заданной угловой скорости через переключатель 3 поступает на сельсин-приемник 4 гирокомпаса, который через механический дифференциал 6 разворачивает датчик 8(9 курса. Сигнал с датчика 8 (9)1 курса поступает на вход блока 10 (11) коррекции, в котором вырабатываются сигналы, пропорциональные первой производной и интегралу от угла курса. Сигналы, пропорциональные углу, про.изводной и интегралу от угла курса, поступают на вход усилителя 13 (±, Усиленный сигнал поступает на исполнительный механизм 15 tlG ), который кинематически связан с механическим интегратором 17 (18 ). Интегратор 17 (18) через механический дифференциал 19 разворачивает датчик 12 обратной связи, сигнал с которого поступает также на вход усилителя
13(14 )., Когда сигнал с датчика 12 обратной связи будет равен сигнале1М дажчика 8(9; курса и блока 10 (11), коррекции, амплитуда перекладки руля будет пропорциональна заданной,, -Меняя коэффициенты на пульте управления, производу1т регулировку системы управления. Помещая систему со стендом
в различные испытательные камеры, производят испытания при различных климатических условиях.
- Стенд позволяет повысить точность регулирования системы управления и приблизить ее испытание к реальньал условиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Система управления судном | 1977 |
|
SU644666A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
СТЕНД ДЛЯ РЕГУЛИРОВКИ И ИСПЫТАНИЙ аЮТЕМЫ УПРАВЛЕНИЯ КУРСОМ СУДНА, содержащий сельсин-приемник гирокомпаса, кинематически связанный через механический дифференциал со штурвалом и датчиками курса, выходы которых электрически соединены соответственно с входами блоков коррек- , ции, причем выходы датчиков курса, блоков коррекции и датчика обратной связи соединены соответственно с входами усилителей, подключенных к соответствующим исполнительным механизмам, отличающийся тем, что, с целью повышения точности регулирования и приближения испытаний системы к регшьным условиям, он снабжен датчиком синусоидальных колебаний и задатчиком угловой скорости, электрически подключенными через переключатель к сельсин-приемнику гирокомпаса, а также подключенным к входу датчика обратной связи механическим дифференциалом, механическими интеграторами и двигателями, каждый из котор 1х соединен с одним из механических интеграторов, связанных входом с соответствующим исполнительным механизмом, а выходом - с механическим/Л дифференциалом.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и Тетюев Б.А | |||
| Система автоматического управления судов по курсу | |||
| Л., Судостроение, 1974, стр | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
