сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Робот к штамповочному прессу | 1985 |
|
SU1340868A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
Изобретение относится к машиностроению, а именно к манипуляторам для штамповочных прессов. Цель изобретения - повышение производительности и надежности и сокращение производственных площадей. Манипулятор содержит два ступенчатых плунжера, расположенных параллельно и встречно своими ступенями. на которых установлена каретка с двумя полостями с возможностью перемещения по ступенчатым плунжерам при подаче сжатого воздуха в полости. Так обеспечивается горизонтальное перемещение руки со схватом. Вертикальное перемещение руки со схватом обеспечивается штангой, закрепленной на штоках цилиндров вертикального привода и вставленной в отверстие ползуна, перемещающегося по вертикальному направляющему пазу, выполненному в каретке, установленной на ступенчатых плунжерах. 5 ил.
Изобретение относится к вспомогатель- ному оборудованию штамповочного производства, а именно к конструкциям манипуляторов, используемых при автоматизации процессов штамповки.
Целью изобретения является повышение производительности и надежности и сокращение занимаемых манипулятором производственных площадей.
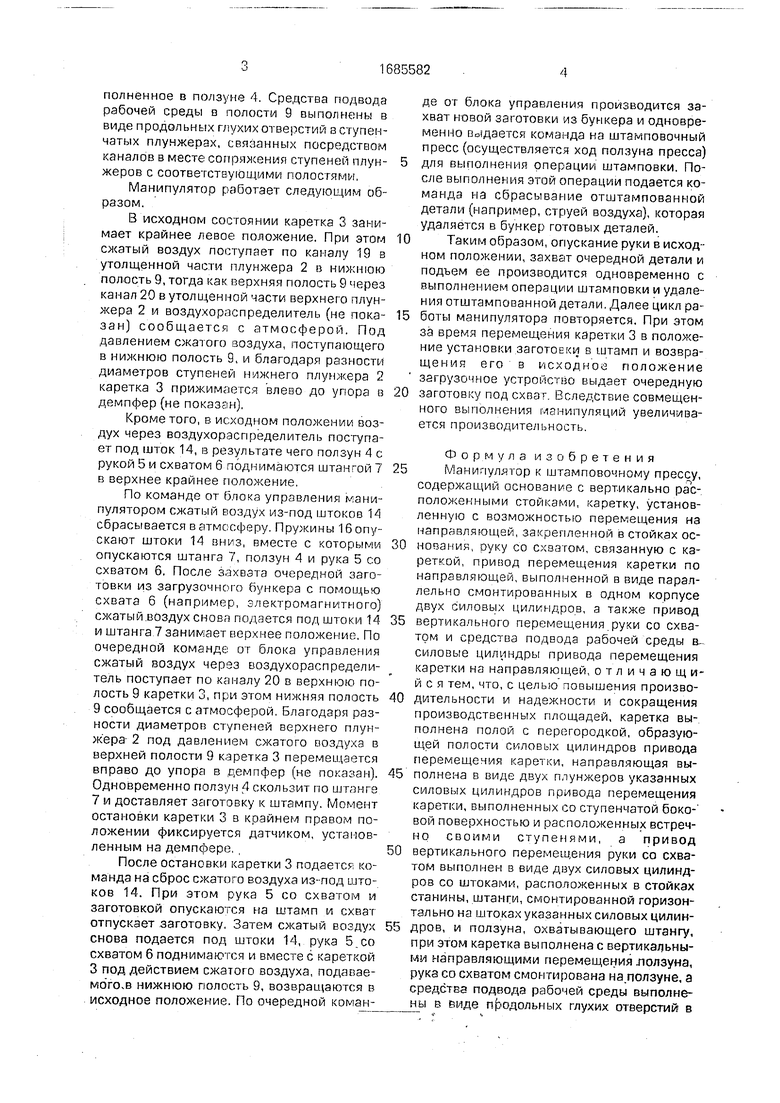
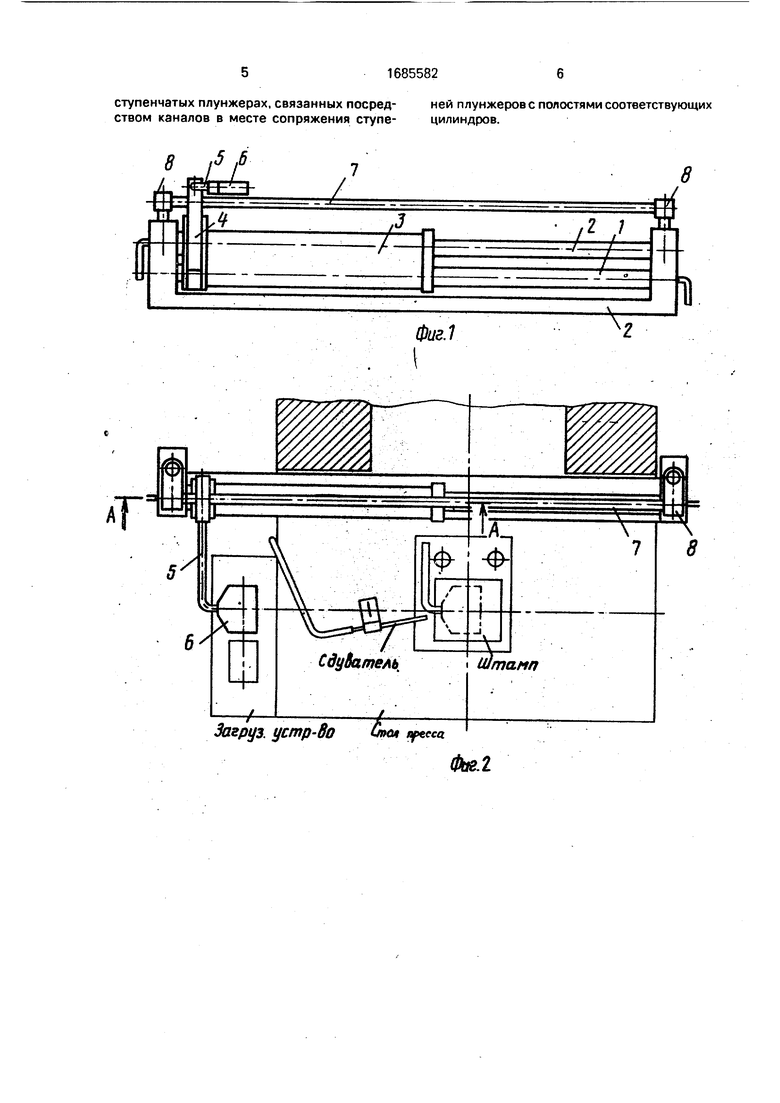
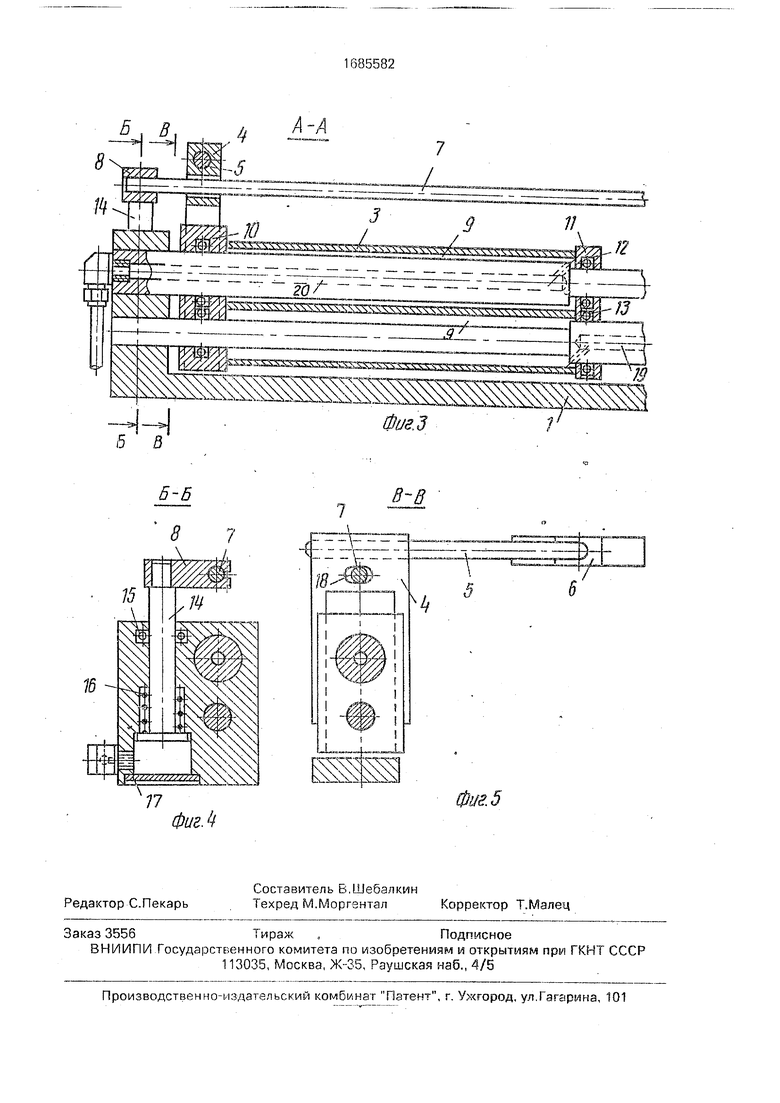
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - расположение манипулятора на столе пресса, вид в плане; на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З, на фиг.5 - разрез В-В на фиг.З.
Манипулятор содержит основание 1, два ступенчатых плунжера 2, расположенных параллельно и встречно своими ступенями, каретку 3, установленную подвижно на плунжерах 2, выполняющих роль направляющей, ползун 4 с рукой 5 и схватом 6, установленный вертикально подвижно, на
каретке 3. Через ползун 4 свободно пропущена штанга 7, концы которой закреплены в головках 8 штоков привода вертикального перемещения руки. Каретка 3 имеет две полости 9, которые герметично закрыты крышками 10 и 11, установленными на торцах В крышках сделаны отверстия по диаметру ступеней плунжеров и выточки под уплотни- тельные кольца 12 и 13. На одной из крышек (левый на фиг.З) выполнены вертикальные направляющие пазы для ползуна 4, несущего руку 5. Привод вертикального перемещения выполнен в виде штоков 14, вставленных в цилиндрические отверстия, выполненные в левой и правой стойках основания 1. Штоки 14 уплотнены в отверстиях кольцами 15 и подпружинены пружинами 16. Снизу отверстия в левой и правой стойках основания герметично закрыты крышками 17. Штанга 7, соединяющая головки 8 штоков привода вертикального перемещения, вставлена в овальное отверстие 18, вы( со ел ел
00
го
гюлненное в ползуне 4. Средства подвода рабочей среды в полости 9 выполнены в виде продольных глухих от верстий в ступенчатых плунжерах, связанных посредством каналов в месте сопряжения ступеней плунжеров с соответствующими полостями.
Манипулятор работает следующим образом.
В исходном состоянии каретка 3 занимает крайнее левое положение. При этом сжатый воздух поступает по каналу 19 в утолщенной части плунжера 2 в нижнюю полость 9, тогда как верхняя полость 9 через канал 29 в утолщенной части верхнего плунжера 2 и воздухораспределитель (не показан) сообщается с атмосферой. Под давлением сжатого воздуха, поступающего в нижнюю полость 9, и благодаря разности диаметров ступеней нижнего плунжера 2 каретка 3 прижимается влево до упора в демпфер (не показан).
Кроме того, в исходном положении воздух через воздухораспределитель поступает под шток 14, в результате чего ползун 4 с рукой 5 и схватом 6 поднимаются штангой 7 в верхнее крайнее положение.
По команде от блока управления манипулятором сжатый воздух из-под штоков 14 сбрасывается в атмосферу. Пружины 16 опускают штоки 14 вниз, вместе с которыми опускаются штанга 7, ползун 4 и рука 5 со схватом 6. После захвата очередной заготовки из загрузочного бункера с помощью схвата 6 (например, электромагнитного) сжатый воздух снова подается под штоки 14 и штанга 7 занимает верхнее положение. По очередной команде от блока управления сжатый воздух через воздухораспределитель поступает по каналу 20 в верхнюю полость 9 каретки 3, при этом нижняя полость 9 сообщается с атмосферой. Благодаря разности диаметров ступеней верхнего плунжера 2 под давлением сжатого воздуха в верхней полости 9 каретка 3 перемещается вправо до упора в демпфер (не показан). Одновременно ползун 4 скользит по штанге 7 и доставляет заготовку к штампу. Момент остановки каретки 3 в крайнем правом положении фиксируется датчиком, установленным на демпфере.
После остановки каретки 3 подается команда на сброс сжатого воздуха из-под штоков 14. При этом рука 5 со схватом и заготовкой опускаются на штамп и схват отпускает заготовку. Затем сжатый воздух снова подается под штоки 14, рука 5 со схватом 6 поднимаются и вместе с кареткой 3 под действием сжатого воздуха, подаваемого,в нижнюю полость 9, возвращаются в исходное положение. По очередной команде от блока управления производится захват новой заготовки из бункера и одновременно выдается команда на штамповочный пресс (осуществляется ход ползуна пресса)
для выполнения операции штамповки. После выполнения этой операции подается команда на сбрасывание отштампованной детали (например, струей воздуха), которая удаляется в бункер готовых деталей.
Таким образом, опускание руки в исходном положении, захват очередной детали и подъем ее производится одновременно с выполнением операции штамповки и удаления отштампованной детали. Далее цикл работы манипулятора повторяется. При этом за время перемещения каретки 3 в положение установки заготовки в штамп и возвращения его в исходное положение загрузочное устройство видает очередную
заготовку под схват Вследствие совмещенного выполнения манипуляций увеличивается производительность
Формула изобретения
Манипулятор У штамповочному прессу,
содержащий основание с вертикально расположенными стойками, каретку, установленную с возможностью перемещения на направляющей, злгрепленной в стойках основация, руку со схвагом, связанную с кареткой, привод перемещения каретки по направляющей, выполненной в виде параллельно смонтированных в одном корпусе доух силовых цилиндров, а также привод
вертикального перемещения руки со схватом и средства подвода рабочей среды в- силовые цилиндры привода перемещения каретки на направляющей, отличают, и- и с я тем, что, с целью повышения производительности и надежности и сокращения производственных площадей, каретка выполнена полой с перегородкой, образующей полости силовых цилиндров привода перемещения каретки, направляющая выполнена в виде двух плунжеров указанных силовых цилиндров привода перемещения каретки, выполненных со ступенчатой боковой поверхностью и расположенных встречно своими ступенями, а привод
вертикального перемещения руки со схватом выполнен в виде двух силовых цилиндров со штоками, расположенных в стойках станины, штанги, смонтированной горизонтально на штоках указанных силовых цилиндров, и ползуна, охватывающего штангу, при этом каретка выполнена с вертикальными направляющими перемещения лолзуна, рука со схвагом смонтирована на ползуне, а средства подвода рабочей среды выполнены в виде продольных глухих отверстий в
В I516
Загруз. устр-Во &кн уе«
Фиг.1
Фаг
8
5 В
6-6
7
15
18ъ
Ч
Т 5
6
фиг. 5
| Манипулятор к штамповочному прессу | 1981 |
|
SU1006029A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
