1
Изобретение относится к технологическому оборудованию для механизации и автоматизации вспомогательных технологических операций во взрывоопасных и опасных производствах, а также может быть использовано в цехах механической обработки, ковки, штамповки, сборки, на операциях перемещения деталей.
Известен манипулятор с тремя степенями свободы, содержащий привода, один из которых выполнен в виде силового цилиндра, кинематически связанного с механической рукой, несущей охват 1.
Недостатком этого манипулятора является наличие больщого цикла приводов, что усложняет,конструкцию.
Цель изобретения - упрощение конструкции манипулятора.
Указанная цель достигается тем, что манипулятор снабжен дополнительным силовым цилиндром, корпус которого жестко связан с корпусом основного, на внутренней поверхности дополнительного цилиндра выполнен винтовой паз, щток этого силового цилиндра установлен на -Штоке основного с возможностью осевого перемещения отно(54) МАНИПУЛЯТОР
сительно него, а площадь порщня дополнительного силового цилиндра меньше, чем площадь поршня основного, причем на штоке дополнительного силового цилиндра выполнен -паз, а на щтоке основного силового 5 цилиндра установлены два пальца, один из которых размещен в винтовом пазу дополнительного цилиндра, а второй жестко связан с механической рукой и расположен в пазу штока дополнительного силового цилиндра
Такая конструкция позволяет манипуля10 тору совершить три движения: поступательное перемещение схвата, поворот схвата вокруг оси штока и основного силового цилиндра и ротацию схвата.
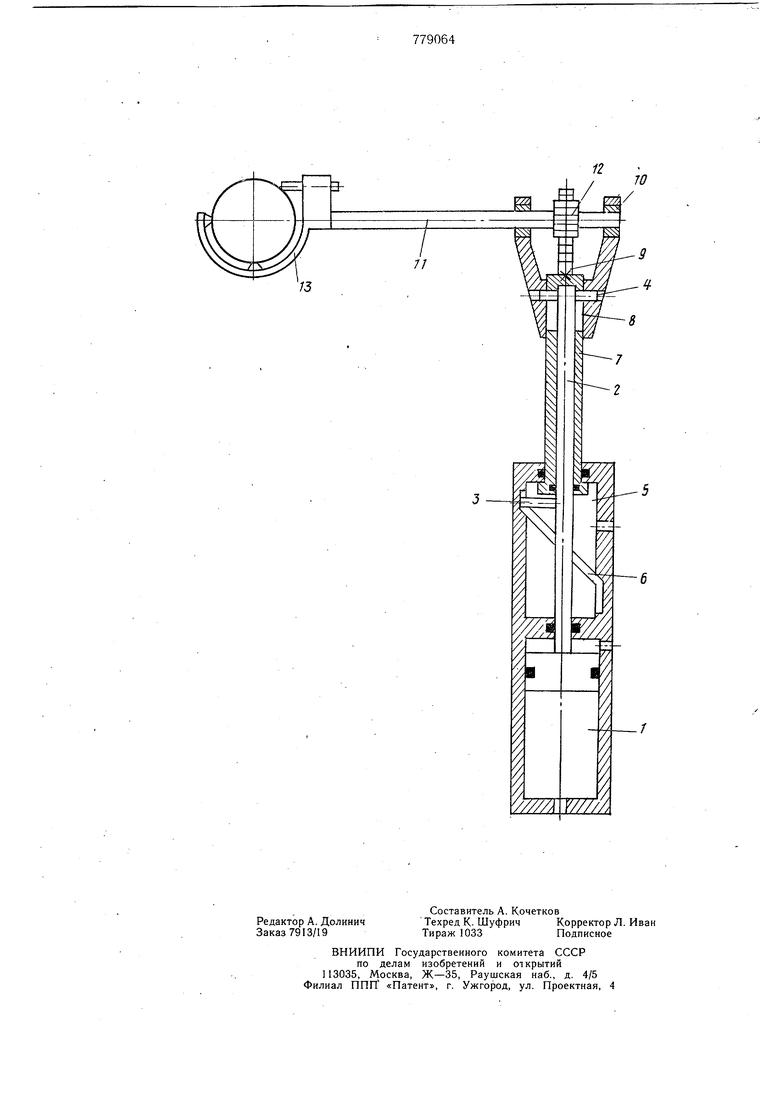
На чертеже схематически изображен предлагаемый манипулятор.
15
Манипулятор содержит основной силовой цилиндр 1 со штоком 2 и поршнем с первым пальцем 3 и вторым пальцем 4, а также дополнительно - силовой цилиндр 5 с винтовым пазом 6 на внутренней поверх20 ности корпуса этого цилиндра и со штоком 7, на одном конце которого имеется поршень, площадь которого меньше, чем площадь порш5. ня основного силового цилиндра I, а на другом - выполнен паз 8. Рейка 9
снчзьк ает силовой цилиндр 5 с механической рукой, установленной в опоре 10. Мехлническая рука выполнена в виде оси 11, на которой установлена шестерня 12 и схват 13.
Манипу;1ятор работает следующим образом.
При движении вниз поршня 2 со штоком, шток 7 дополнительного силового цилинд-. ра 5 с рейкой 9 остается неподвижным, поджатый давлением рабочей среды этого дополнительного силового цилиндра. Вместе со штоком 2 движется вниз жестко связанная с ним при помощи второго пальца 4 опора 10, несущая механическую руку в
виде оси 11 с щестерней 12 и со схватом13,
Одновременно шток 2 опускается вниз и вращается вокруг своей оси, благодаря паль цу 3, входящему в винтовой паз 6.
При опускании щтока 2 шестерня 12 обкатывается относительно рейки 9, жестко связанной со щтоком 7 дополнительного силового цилиндра, при этом происходит поворот схвата 13 относительно оси 11, шарнирно установленной в опоре 10, на угол, .ограниченный пазом 8. Далее, палец 4 перемещает вниз шток 7 с дополнительного цилиндра 5, преодолевая давление рабочей среды этого цилиндра. Происходит опускание и проворот схвата 13 относительно оси огновиого цилиндра 1. Возвращение схвата
в исходное положение происходит в обратной последовательности.
Формула изобретения Манипулятор с тремя степенями свободы, содержащий привода, по меньшей мере один из которых выполнен в виде силового цилиндра, кинематически связанного с механической рукой, несущей схват, отличающийся тем, что, с целью упрощения конструкции, он снабжен дополнительным силовым цилиндром, корпус которого жестко связан с корпусом основного, на внутренней поверхности дополнительного цилиндра выполнен винтовой паз, шток этого силового цилиндра установлен на штоке основного с возможностью осевого перемещения относительно него, а площадь порщня дополнительного силового цилиндра меньще, чем площадь поршня основного, причем на штоке дополнительного силового цилиндра выполнен паз, а на штоке основного вилового цилиндра установлены два пальца, один из которых размещен в винтовом пазу дополнительного цилиндра, а второй жестко связан с механической рукой и расположен в пазу щтока дополнительного силового цилиндра.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 216548, кл. В 25 J 1/02, 21.09.64.
;/
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1065185A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |