Изобертение относится к машиностроению, конкретнее к захватным устройствам промышленных роботовj и является усовершенствованием устройства по авт. св. № 1093545.
Целью изобретения является упрощение конструкции и повышение надежности схвата.за счет регулирования силы зажима,
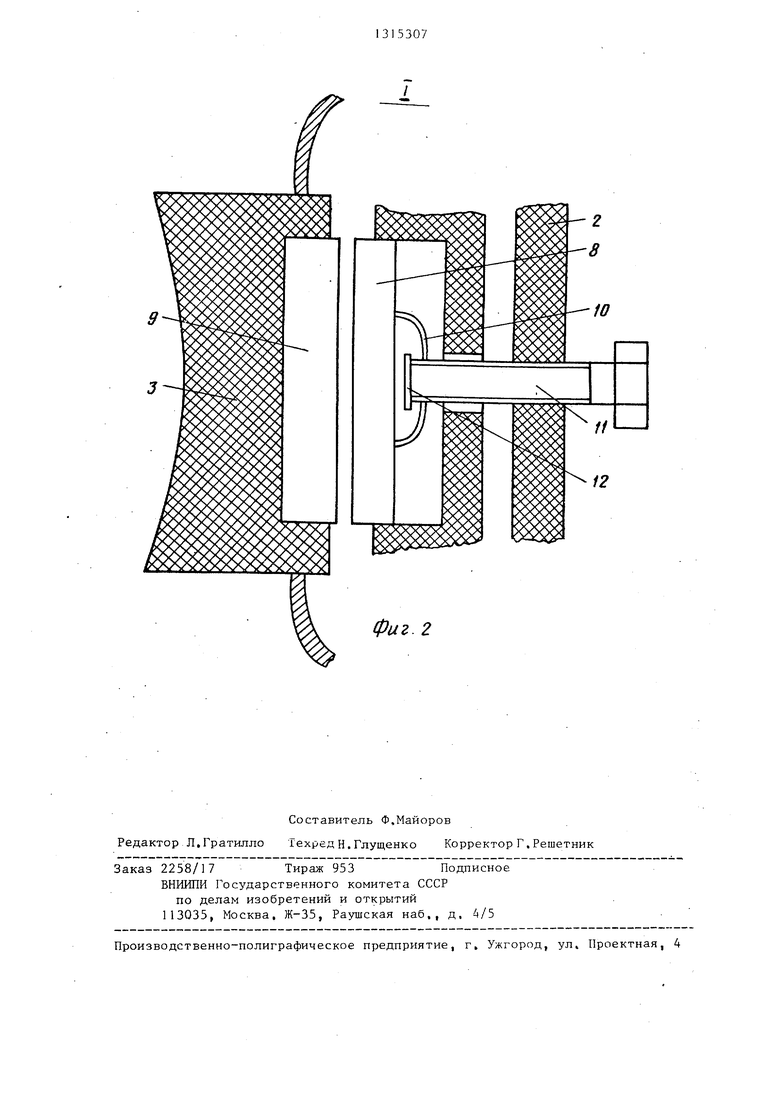
На фиг,1 показан схват, разрез; на фиг,2 - узел I на фиг.1.
Схват содержит губки 1, каждая из которых выполнена из неподвижной 2 и подвижной 3 частей, связанных межд собой упругими элементами 4. Каждая губка снабжена приводом 5 ее перемещения и в каждой губке выполнен канал 6 для подачи рабочей среды, соединенный трубопроводами 7 с приводом 8, Один из участков канала 6 образован подвижной 3 и неподвижной 2 частями губки. На этом участке на не- .подвижной части губки закреплена пластина 8, а на подвижной - пластина 9 датчика. Толщина пластины 8 равна или больше расстояния между подвижной и неподвижной частями губок до начала захвата.
Для обеспечения возможности перемещения пластины 8 и ее фиксаций в различных положениях относительно неподвижной части губок на пластине 8 может быть закреплен, например, фланец 10, в отверстии которого расположены часть винта 11 со стопорным кольцом 12. Стопорное кольцо 12 за- креплено на винте 11 и имеет диаметр больший, чем отверстие в фланце 10. Винт 11 имеет резьбовое соединение с неподвижной частью 2 губки.
Устройство работает следующим образом.
Перед началом захвата детали вращением винтов 11 перемещаются пластины 8 до установления на каждой губке Величины зазора между пластинами, соответствующего необходимой силе
. у ,
153072
зажима детали данной губкой. Насосная станция (не показана ) начинает подавать в трубопроводы 7 рабочую среду, например жидкость или газ.
5 Приводы 5 губок воздействуют на части 2 губок, вследствие чего губки начинают смещаться. При взаимодействии подвижной части 3 губок с захватываемым объектом происходит смеще10 ние подвижной ч-асти 3 относительно неподвижной части 2, что приводит к деформации упругого элемента 4 и возникновению силы давления со стороны губок на захватываемый объект,
15 причем величина этой силы определяется зазором между пластинами 8 и 9 данной губки. При достижении требуемой йеличины давления на объект пластины 8 и 9 соприкасаются и перекрывают канал 6, вследствие чего рабочая среда перестает поступать в привод 5 и губка останавливается. После останова всех губок предмет оказывается зажатым губками.
После перемещения детали в требуемую точку позиционирования система управления ротобом отключает насосную станцию и открывает сливные тру- бопроводы (не показаны ) приводов 5,
30 в результате чего приводы 5 возвращаются в исходное положение и схват разжимается.
20
25
Формула изобретения
Схват промьшленного робота по авт, св. № 1093545, отличающий с я тем, что, с целью упрощения конструкции и повьш1ения надежности за счет регулирования силы зажима, пластины датчиков расположены на неподвижных частях губок с возможностью параллельного регулировочного перемещения и фиксации, а толщина этих пластин -не меньше зазора между подвижными и неподвижными частями губок.
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1093545A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| Схват | 1981 |
|
SU952581A1 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
Изобретение относится к машиностроению, а более конкретно к захватным устройствам.промышленных роботов,. Целью изобретения является упрощение конструкции и повьшение надежности схвата за счет регулирования силы зажима детали. Перед захватом детали вращением винтов 11 перемещают пластины 8 до установления на каждой губке зазора между пластинами, соответствующего необходимой силе захвата. При подаче рабочей среды от насосной станции в трубопровод 7 к приводам 5 губки начинают сходиться и при касании с деталью происходит уменьшение зазора между, подвижной 3 и неподвижной 2 частями губок за счет деформирования упругих элементов 4. При достижении заданного усилия, которое может регулироваться, зазор исчезает и подача рабочей среды к приводам 5 прекращается. Губки останавливаются. Освобождение схвата происходит при выключении насосной станции и открытии сливных трубопроводов, 2 ил. с & (Л со СП СО N) 9иг.1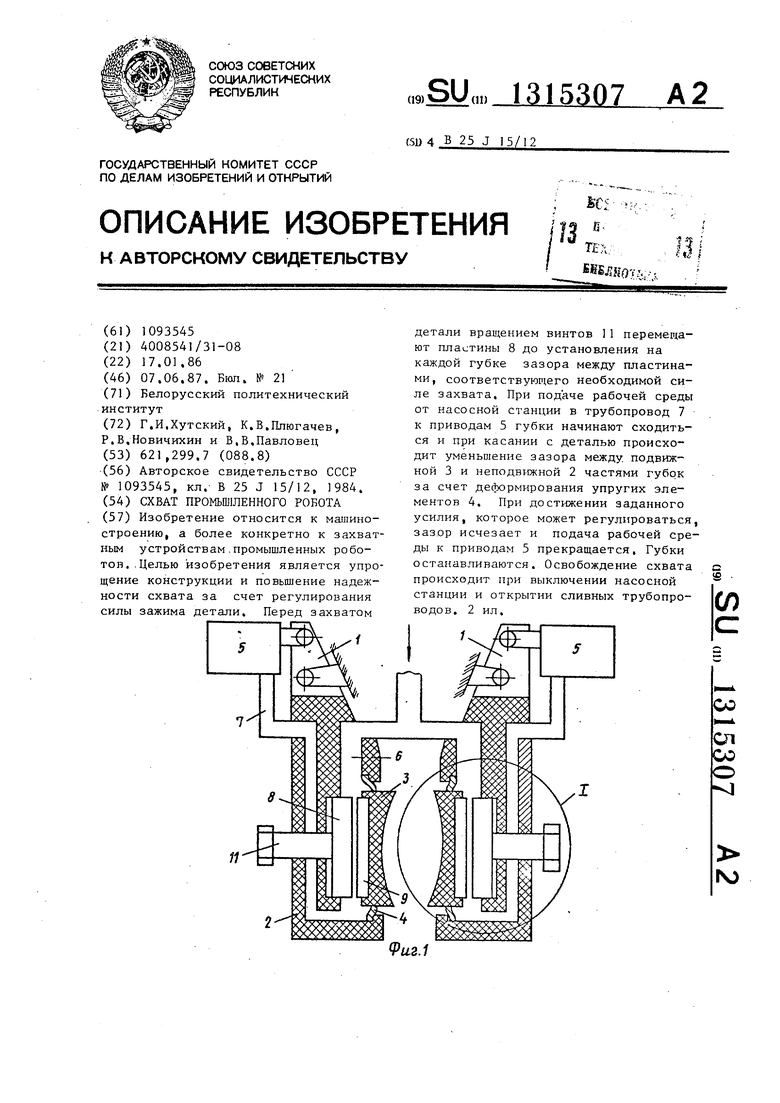
Составитель Ф.Майоров Редактор Л,Гратилло Техред Н.Глущенко Корректор Г. Решетник
зТказ 2Т5 8 /Т7 Тир ТзТПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва. Ж-35, Раушская наб., д. А/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват промышленного робота | 1983 |
|
SU1093545A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
