J / Объект cSopxu Ибъект VWnг -//// /////////// ////////////////f//f
О со
9 сь
4 сборки //////////Jr/ ///// /////////////// 5 Изобретение относится к механизации транспортных операций, а именно к конструкциям грузоведущих конвейеров. Известен вертикально замкнутый грузоведущий конвейер, содержащий опорную металлоконструкцию с направляющими путями, тяговую цепь, приводную и натяжную звездочки, привод натяжное устройство и грузоведущие кулаки, снабженные опорными роликами и связант1ые с тяговой цепью ij , Недостатком данного грузоведут его конвейера является то, что он не обеспечивает автоматического отцепления изделий на- прямолинейньк участ ках конвейера, необходимость в котором возникает при переходе конвейера на сборку изделий, имеющих значительно меньший технологический цик сборки, чем цикл сборки базовых изделий, исходя из которого расчитана длина конвейера, т.е. известная конструкция конвейера не позволяет вести параллельную сборку изделий на двух и более участках конвейера, что снижает технологические возможности последнего. Известен также грузоведущий конвейер, включающий бесконечно замкнутьй в вертикальной плоскости тяговый орган с закрепленными на каретках толкателями, отклоняющий механиз и упоры, vcтaнoвлeнныe вдоль направляющих ,2J . Недостатком данного грузоведущего конвейера является ограниченность технологических возможностей, так как данный грузоведущий конвейер не позволяет йести параллельную сборку изделий на двух и более участках кон вейер, что снижает технологические возможности грузоведущего конвейера. Целью изобретения является расширение технологических возможностей. Указанная цель достигается тем, что в грузоведущем конвейере, включающем бесконечно замкнутый в вертикальной плоскости тяговый орган с закрепленными на каретках толкателями, отклоняюпшй механизм и упоры, установленные вдоль направляющих, отклоняющий механизм вьтолнен в виде ролика и наклонно установленной на каждой каретке подпружиненной ползупжи с копиром и пальцем, расположенным с возможностью взаимодействия с упорами, причем ролик смонтирован на каждом толкателе с возможностью взаимодействия с соответствующим копиром. На фиг. I представлен грузоведущий конвейер, общий вид; на фиг. 2 узел I на фиг. I; на фиг. 3 - узел It на фиг. 1. Грузоведущий конвейер содержит бесконечно замкнутый в вертикальной плоскости тяговьй орган 1, на котором закреплены толкатели 2 накаретках 3, отклоняющий механизм 4, направляющие 5 и установленные вдоль них упоры 6. Отклоняющий механизм 4 в свою очередь состоит из ролика 7 и подпружиненной ползушки 8, которая наклонно установлена на каждой карет ке 3, причем подпружиненная полйутака 8 снабжена копиром 9 и пальцем 10, каждый взаимодействует с упорами 6. Кроме того, ролик 7 смонтирован на каждом чолкателе 2 и взаимодействует с соответствующим копиром 9 подпружиненной ползушки 8. Толкатели 2 закреплены на каретках 3. посредством осей 11 с возможностью поворота вокруг них, при зтом поворот толкателя ограничен упором 12. Подпружиненная ползушка 8 имеет возможность перемещения в цилиндрической расточке 13 под действием упора 6 и пружины 14. Грузонесущий конвейер работает следующим образом. При сборке базовых изделий, технологический цикл сборки которых завершается в конце конвейера, место отцепления изделия устанавливается также в конце конвейера, где и закрепляется гГереставной упор 6. Изделие, подлежащее сборке, устанавливается на первой рабочей позиции, соответствующей началу технологического цикла сборки. После включения грузоведущего конвейера бесконечно замкнутый в вертикальной плоскости тяговый орган 1 перемещается вместе с каретками 3, толкателями 2 захватьшает изделие и транспортирует его вдоль конвейера. При этом ролик 7 толкателя 2, взаимодействуя с копиром 9 подпружиненной ползушки 8, препятствует повороту толкателя 9. К моменту завершения технологиеского цикла сборки изделие доходит
до разгрузочной позиции, а соответственно, и до переставного упора 6. При набегании пальца 10 подпружиненной ползушки 8 на упор 6 ползушка 8 притормаживается и при дальнейшем движении тележки перемещается наклонно вверх по-цилиндрической расточке 13, при этом копир 9 вьшодится изпод ролика 6, последний скатывается с подпруткиненной ползушки 8 и под действием силы сопротивления перемещению изделия, а также под самим весом толкателя 2 поворачивается в направлении, обратном движению конвейера, т.е. отцепляется от изделия.
При дальнейшем перемещении каретки 9 толкатель 2 удерживается в откинутом положении горизонтальной поверхностью упора 6.
При сходе подпрзгжиненной ползугаки 8 с упора 6 пружииа 14 перемещает
ее наклонно вниз и, воздействуя на ролик 7, приводит толкатель 2 в исходное положение.
Автоматическое отцепление изделия на любом прямолинейном участке конвейера обеспечивается переустановкой переставных упоров 6. При параллельной сборке изделий на двух и более участках конвейера устанавливают соответственно два и более переставных упора 6.
Грузоведущий конвейер с предлагаемым устройством отцепления изделия позволит расширить его технологические возможности, т.е. обеспечит автоматическое отцепление изделия на любом прямолинейном участке конвейера, а также позволит вести параллельную сборку изделий одновременно на нескольких участках конвейера.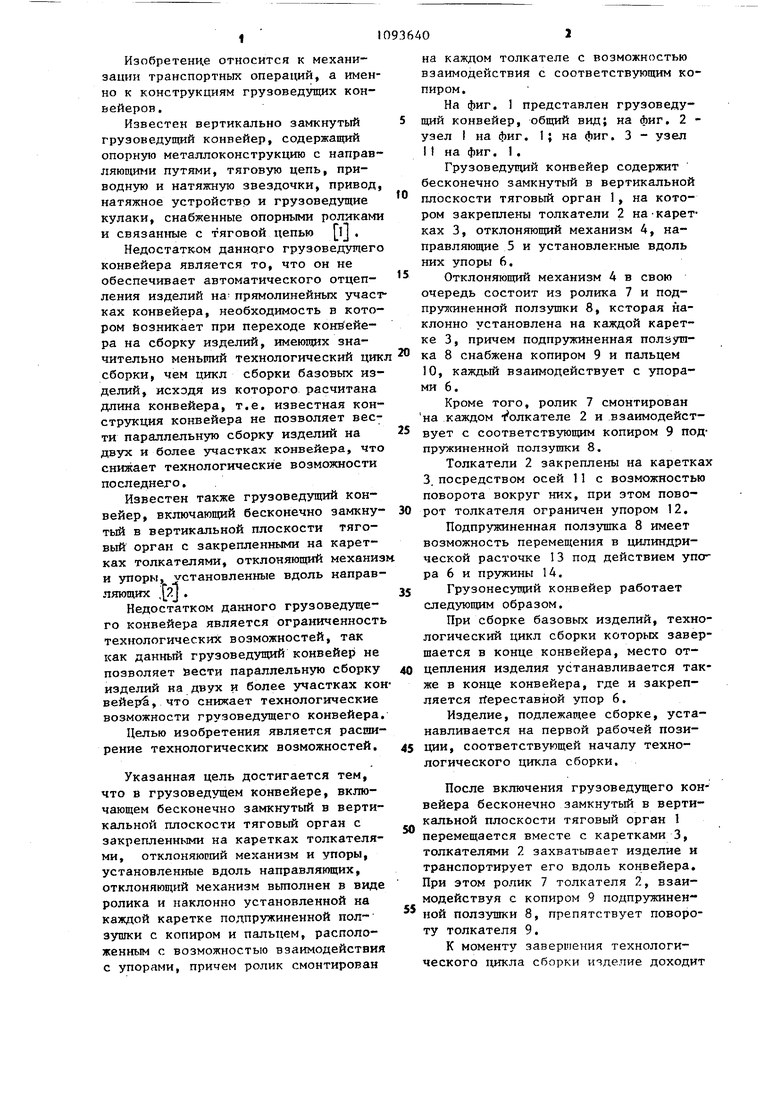

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоведущий конвейер | 1989 |
|
SU1747355A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Грузоведущий конвейер | 1990 |
|
SU1724529A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| ИСКУССТВЕННЫЙ МЕХАНИЗИРОВАННЫЙ ЦЕЛИК | 1995 |
|
RU2083844C1 |
| Автоматическая линия для сварки кольцевых швов | 1990 |
|
SU1766638A1 |
| Шаговый конвейер | 1977 |
|
SU745805A1 |
| ГРУЗОВЕДУЩИЙ КОНВЕЙЕР | 1966 |
|
SU189745A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Конвейер для несинхронных поточных линий | 1987 |
|
SU1553443A1 |

ГРУЗОВЕДУЩИЙ КОНВЕЙЕР, включающий бесконечно эамкнутый в вертикальной плоскости тяговый орган, с закрепленными на каретках толкателями, отклоняющий механизм и упоры, установленные вдоль направляющих, отличающийся тем, что, с целью расширения технологических возможностей, отклоняющий механизм выполнен в виде ролика и наклонно установленной на каждой каретке подпружиненной ползушки с копиром и пальцем, расположенным с возможноетью взаимодействия с соответствующим копиром.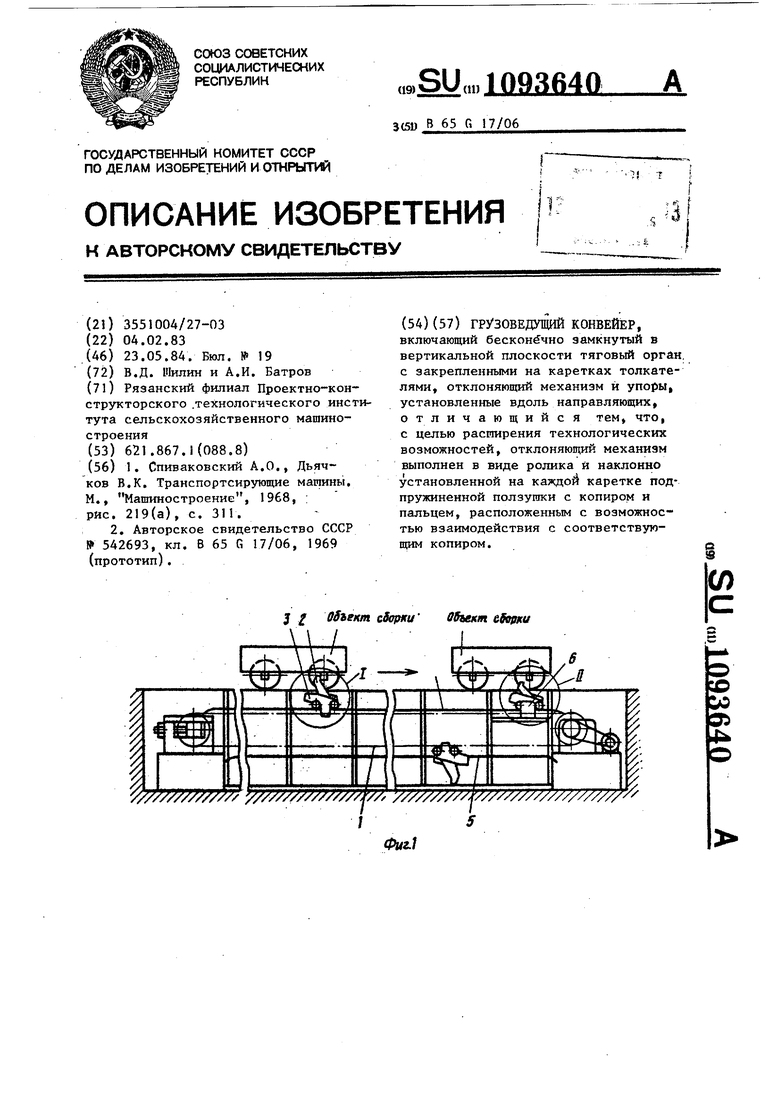
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спиваковский А.О., Дьячков В.К | |||
| Транспортсирующие машины | |||
| М., Машиностроение, 1968, : рис | |||
| Прибор для записи звуковых волн | 1920 |
|
SU219A1 |
| Способ приготовления массы для карандашей | 1921 |
|
SU311A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Щелевой конвейер для транспортировки штучных грузов | 1969 |
|
SU542693A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
