Изобретение относится к устройствам для-перемещения грузов и может быть использовано в вертикальных конвейерах. Известно устройство для перемещения груза в горизонтальном положении, включающее опоры с подщипниками, на которых установлен вал с закрепленными на нем водилами, грузонесущие платформы, подвешенные на валах, причем на одной из опор соосно валу и на осях установлены звездочки одинакового диаметра, которые кинематически связаны между собой посредством обхватывающей их замкнутой цепи 1.. Недостатком данного устройства является малая производительность при больщой занимаемой производственной площади и ограниченном количестве грузонесущих платформ, которое лимитировано диаметром водила и не может быть увеличено без увеличения габаритов устройства. Кроме того, производительность устройства ограничена малой скоростью вращения из-за больщой инерционности устройства, связанной с его массивностью. Устройство характеризуется также недостаточной устойчивостью грузонесущих платформ в горизонтальном положении. Имеющаяся в данном устройстве замкнутая цепь налагает кинематическое ограничение на раскачивание грузонесущих платформ. Однако полного исключения раскачивания нет, так как цепь даже в натянутом состоянии обладает определенной гибкостью. В процессе работы цепь, несмотря на подпружиненные натяжные звездочки,прослабляется. Это особенно заметно при- пуске и остановке устройства и является следствием массивности и инерционности самого устройства и щарнирно подвещенных к нему грузонесущих платформ. Наиболее близким техническим рещением к изобретению является полочный элеватор, включающий два бесконечно замкнутых органа с закрепленными на нем грузоносителями, каждый из которых имеет две горизонтальных каретки с установленными на осях катками, опирающимися на направляющее приспособление 2. Недостатком известного устройства является недостаточно высокая надежность и долговечность элеватора из-за динамических нагрузок, возникающих в процессе транспортировки. Целью изобретения является повыщение надежности и долговечности. Указанная цель достигается тем, что в полочном элеваторе, включающем два бесконечно-замкнутых органа с закрепленными на нем грузоносителями, каждый из которых имеет две горизонтальных каретки с установленными на осях катками, опирающимися на направляющее приспособление, последнее выполнено в виде двух пар горизонтальных и двух пар вертикальных направляющих, причем горизонтальные направляющие в каждой паре смещены одна относительно другой в горизонтальном направлении, при этом одна из горизонтальных кареток каждого грузоносителя снаб жена вертикальной кареткой, установленной с возможностью взаимодействия с вертикальными направляющими, а расстояние между осями катков этой горизонтальной каретки больще расстояния между осями катков другой горизонтальной каретки на величину 1,2 d,гдe d - диаметр катков. На фиг. 1 изображена схема полочного элеватора; на фиг. 2 - момент прохода вертикальной каретки по вертикальным направляющим в зоне вырезов; на фиг. 3-5 - последовательность перехода с вертикальных направляющих на горизонтальные; на фиг. 6 - расположение грузоносителя на горизонтальных направляющих; на фиг. 7- 9 - момент прохождения вырезов при переходе с горизонтальных направляющих на вертикальные. Полочный элеватор включает два бесконечно-замкнутых органа в виде цепей 1 огибающих звездочки 2. На цепях 1 с помощью осей 3 щарнирно подвещены грузоносители в виде платформ 4. Каждый грузоноситель имеет две горизонтальные каретки 5 и 6 с осями 7, на которых установлены катки 8-11, опирающиеся на направляющее приспособление, которое выполнено в виде двух пар горизонтальных 12 и 13 и двух пар вертикальных 14 и 15 направляющих. Горизонтальные направляющие 12 и 13 в каждой паре смещены одна относительно другой в горизонтальном направлении и имеют вырезы 16 в местах прохождения катков 8-11. Одна из горизонтальных кареток 6 имеет вертикальную каретку 17, которая роликами 18 и 19 взаимодействует с вертикальными направляющими 14 и 15, а расстояние между осями 7 катков 10 и 11 этой горизонтальной каретки 6 больще расстояния между осями 7 катков 8 и 9 другой горизонтальной каретки 5 на величину 1,2 d,гдe d - диаметр катков 8-11. Полочный элеватор работает следующим образом. Включается привод (не показан), приводящий в движение звездочки 2, которые в свою очередь тянут цепи 1 и -щарнирно установленные на них оси 3, несущие платформы 4. После загрузки платформа 4 движется по горизонтали и затем вверх, а пара роликов 16 и 17, расположенных в вертикальной плоскости, перемещается по вертикальным направляющим 14 и 15 (фиг. 1). Направление движения бесконечно-замкнутых контуров показано стрелкой А. В это время катки 8-И, расположенные в горизонтальной плоскости 4, не контактируют с направляющим приспособлением.
В нижней части контуров в момент прохождения парой катков 16 и 17 (фиг. 2) iiecTa пересечения горизонтальных 12 и 13 и вертикальных 14 и 15 направляющих по крайней мере один из роликов 16 и 17 попадает в перекрестье вырезов 16 в то время, как другой из роликов 16 и 17 все время находится между вертикальными направляющими 14 и 15. Этим обеспечивается устойчивость платформ 4 в вертикальном направлении, т. е. обеспечивается постоянное горизонтальное положение платформ 4, и, соответственно, грузов, например отлакированных щитовых деталей мебели при перемещении в вертикальном направлении.
В верхней части контуров в момент перехода платформы 4 с вертикальных направляющих 14 и 15 на горизонтальные 12 и 13 ролики 16 и 17 двигаются по закругленным участкам вертикальных направляющих 14 и 15 (фиг. 1, 3 и 4). Из фиг. 3 и 4 . видно, что в момент перехода все ролики 16 и 17 и два катка 10 и 1I контактируют с направляющим приспособлением.
Разность межцентровых расстояний в парах катков 8, 9 и 10, 11 обеспечивает постоянный контакт не менее трех роликов с горизонтальными участками направляющего контура.
В момент выхода на горизонтальные направляющие 12 и 13 (фиг. 1 и 5) весь вес платформы 4 воспринимается катками 8, 9 и 10, 11, оси 7 которых расположены в горизонтальной плоскости платформы 4.
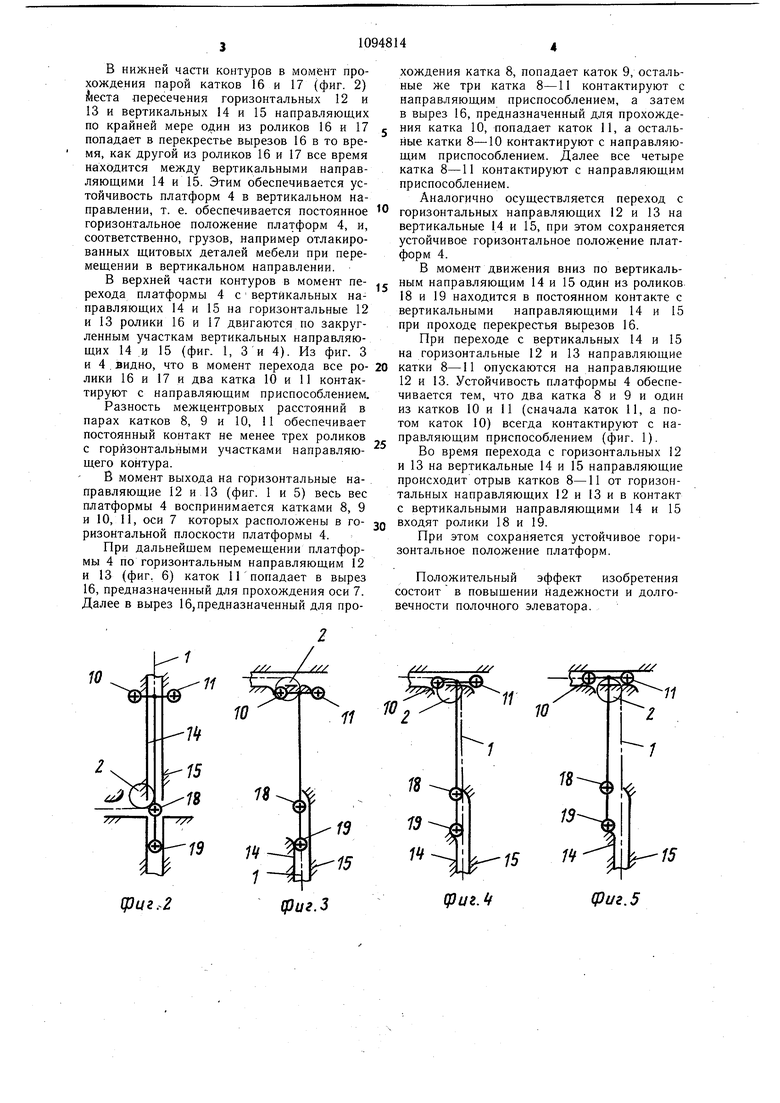
При дальнейшем перемещении платформы 4 по горизонтальным направляющим 12 и 13 (фиг. 6) каток 11 попадает в вырез 16, предназначенный для прохождения оси 7. Далее в вырез 16,предназначенный для прохождения катка 8, попадает каток 9, остальные же три катка 8-11 контактируют с направляющим приспособлением, а затем в вырез 16, предназначенный для прохождения катка 10, попадает каток 11, а остальные катки 8-10 контактируют с направляющим приспособлением. Далее все четыре катка 8-11 контактируют с направляющим приспособлением.
Аналогично осуществляется переход с горизонтальных направляющих 12 и 13 на вертикальные 14 и 15, при этом сохраняется устойчивое горизонтальное положение платформ 4.
В момент движения вниз по вертикальным направляющим 14 и 15 один из роликов 18 и 19 находится в постоянном контакте с вертикальными направляющими 14 и 15 при проходе перекрестья вырезов 16.
При переходе с вертикальных 14 и 15 на горизонтальные 12 и 13 направляющие катки 8-11 опускаются на направляющие 12 и 13. Устойчивость платформы 4 обеспечивается тем, что два катка 8 и 9 и один из катков 10 и 11 (сначала каток 11, а потом каток 10) всегда контактируют с направляющим приспособлением (фиг. 1).
Во время перехода с горизонтальных 12 и 13 на вертикальные 14 и 15 направляющие происходит отрыв катков 8-11 от горизонтальных направляющих 12 и 13 и в контакт с вертикальными направляющими 14 и 15 входят ролики 18 и 19.
При этом сохраняется устойчивое горизонтальное положение платформ.
Положительный эффект изобретения состоит в повышении надежности и долговечности полочного элеватора.
(риг.З
рцг.г
jf
.jZ/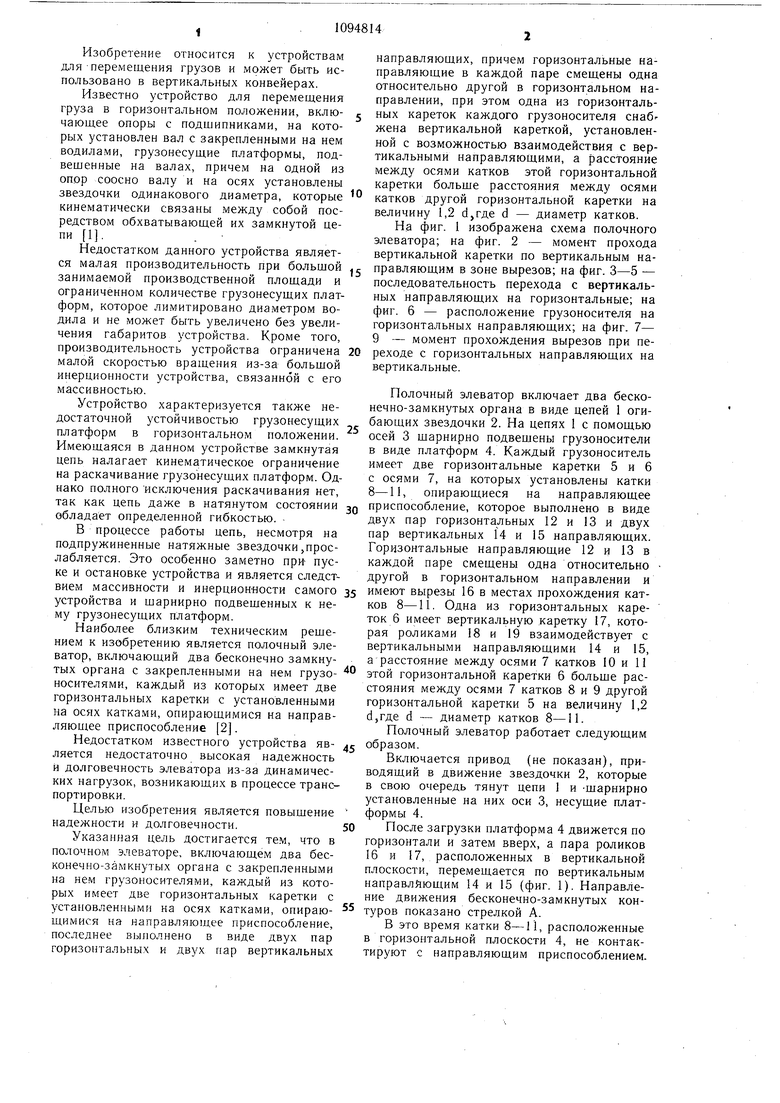
| название | год | авторы | номер документа |
|---|---|---|---|
| Горизонтально-замкнутый конвейер | 1990 |
|
SU1757970A1 |
| Полочный элеватор | 1985 |
|
SU1308529A1 |
| Конвейер с пространственной трассой | 1982 |
|
SU1094812A1 |
| Полочный элеватор | 1980 |
|
SU874514A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Устройство для транспортирования изделий | 1979 |
|
SU882887A1 |
| Полочный элеватор | 1981 |
|
SU1002205A1 |
| Полочный элеватор | 1986 |
|
SU1330049A1 |
| Вертикальный цепной конвейер | 1990 |
|
SU1776247A3 |
| Забойный пластинчатый конвейер | 1982 |
|
SU1102724A1 |
ПОЛОЧНЫЙ ЭЛЕВАТОР, включающий два бесконечно-замкнутых органа с закрепленными на нем грузоносителями, каждый из которых имеет две горизонтальных каретки с установленными на осях катками, опирающимися на направляющее приспособление, отличающийся тем, что, с целью повышения надежности и долговечности, направляющее приспособление выполнено в виде двух пар горизонтальных и двух пар вертикальных направляющих, причем горизонтальные направляющие в каждой паре смещены друг относительно друга в горизонтальном направлении, при этом одна из горизонтальных кареток каждого грузоносителя снабжена вертикальной кареткой, установленной с возможностью взаимодействия с вертикальными направляющими, а расстояние между осями катков этой горизонтальной каретки больше расстояния между осями катков другой горизонтальной каретки на величину I, 2 d, где d - диаметр катков.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перемещения груза в горизонтальном положении | 1975 |
|
SU581024A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Полочный элеватор | 1980 |
|
SU874514A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
