Изобретение откосится к манипуля торостроению, в частности к роботам и манипуляторам с сочленениями меха нической руки в виде шарнирно-стерж навой кинематической цепи. Известны промышленные роботы, ру которых выполнена в виде замкнутой шарнирно-стержнеёой кинематической цепи, являющейся пар ллёлограммным механизмом или пантографом, кинематически связанной зубчатыми секторами Cij. . Однако данные роботы имеют ограниченную зону обслуживания вследствие ограниченного изменения внутрен них углов пантографа. Цель изобретения - расширение зо ны обслуживания. Поставленная цель достигается тем, что манипулятор, содержащий ус новленную на основании поворотную колонну, несущую шарнирно-стержневую механическую руку пантографного типа со схватом, а также вертикальный и горизонтальный приводы, снабжен передачей, образованной из двух звездочек равного диаметра, соедине ных меишу собой замкнутой гибкой связью, а рука выполнена в виде тре последовательно соединенных с помощью Шарниров входного, промежуточ ного и выходного стержней и опорног шарнира промежуточного стержня, делящего его длину на отрезки, пропорциональные длинам входного и выходного стержней, причем звездочки передачи установлены в шарнирах сочленения стернсней и соединены соотIветственно с входным и выходным сте нями. На чертеже представлена схема предлагаемого промышленного робота Промышленный робот включает в себя основание 1, поворотную колонну 2 с корпусом 3, каретку 4 привода вертикального перемещения, вертикальные направляющие 5, каретки 6 привода горизонтального nepeNfeщения, горизонтальные направляющие 7, входной стержень 8 руки, промежуточный стержень 9,. выходной стержень 10, схват 11, звездочки 12 и 13 и гибкую связь 14 (привод не показан). Входной 8, промежуточный 9 и выходной 10 стержни соединены друг с другом последовательно с помощью шарниров. Также шарнирно они соединены с каретками и схватом. На входном стержне 8 жестко укреплена звездочка 12, а на выходном стержне 10 звездочка 13. Звездочки равный диаметр и соединены одна с другой замкнутой гибкой связью 14. Шарнир соединения промежуточного стержня 9 с кареткой 6 делит длину стержня 9 так, что соблюдается пропорция СВ/АВ CD/DE. Промышленный робот работает следующим образом. По сигналу от системы программного управления (не показана ) привод перемещает каретку 4. При этом вся рука, как единая жесткая система, вращается относительно оси каретки горизонтального перемещения, тем самым обеспечивается подъем или опускание груза. Если же привод перемещает каретку 6, то обеспечивается горизонтальное перемещение,. так как благодаря звездочкам 12 и 13 равного диаметра, охватываемым замкнутой гибкой связью 14, и соответствующему соотношению длин звеньев звенья (стержни)8 и 10 остаются параллельными друг другу и в предельном положении могут вместе со звеном (стержнем) 9 вытянуться в одну линию. Таким образом, рука предлагаемого промышленного робота обеспечивает максимальную зону обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2763624C1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
МАНИПУЛЯТОР, содержащий установленную на основании колонну, несущую шарнирно-стержневую механическую руку пантографного типа со схватом, а также вертикальный и горизонтальный приводы, отличающийся тем, что, с целью расширения зоны обслуживания, он снабжен передачей, образованной из двух звездочек равного диаметра, соединенных между собой замкнутой гибкой связью, а рука выполнена в виде трех последовательно соединенных с помощью шарниров входного, промежуточного и выходного стержней и опорного шарнира промежуточного стержня, делящего его длину на отрезки, пропорциональные длинам входного и выходного стержней, причем звездочки передачи установлены в шарнирах сочленения стержней и соединены соответственно с входным и выходным стержнями.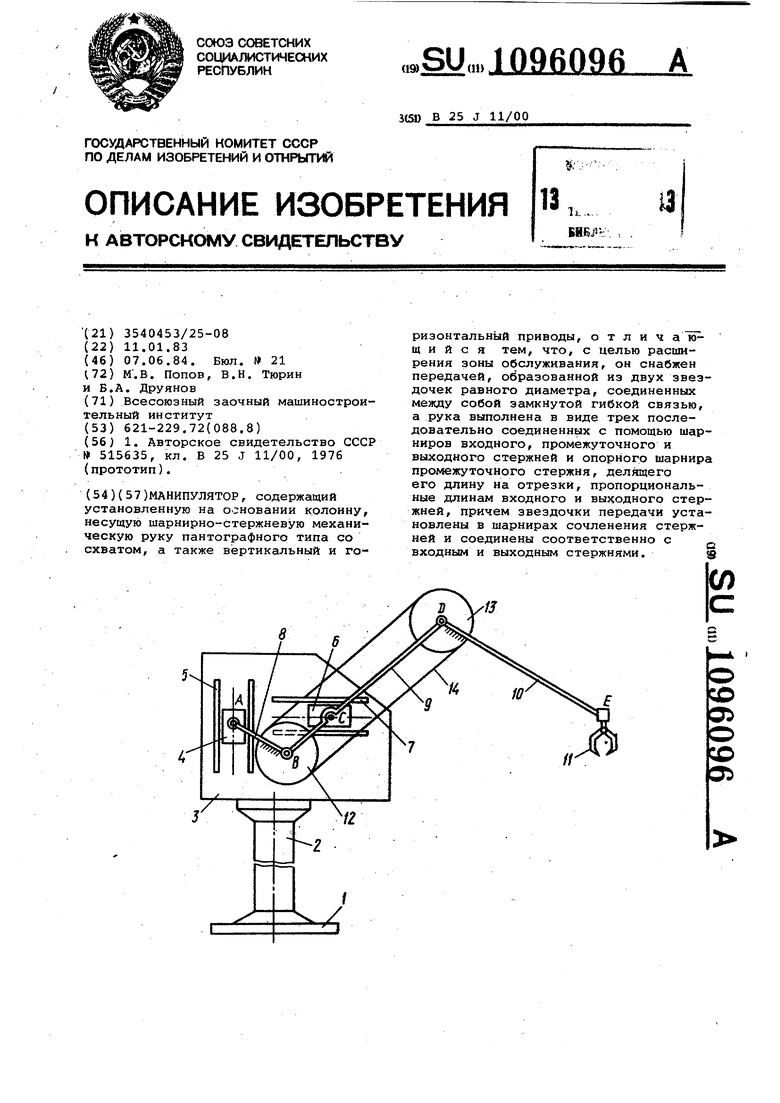
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU515635A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
