ИзоС5ретение относится к машиностроению, а именно к захватам манипуляторов.
Известен захват манипулятора, содержащий губки, шарнирно устанавленные в корпусе с помощью рычагов, и привод рычагов, связанный с ними реечной передачей 1.
Недостатком известнохо захвата является невозможность захвата хрупких деталей в ограниченном рабочем пространс1ве, что снижает его технологические возможности.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата хрупких в ограниченном рабочем пространстве.
Указанная цель достигается тем, что в захвате, содержащем губки, шарнирно установленные в корпусе с помощью рычагов, и привод рычагов, связанный с ними реечной передачей, губки снабжены планками, установленными с возможностью перемещения относительно рычагов параллельно оси захвата и имеющими жесткие упоры.
На фиг. 1 изображен захват, продольный разрез; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1.
На корпусе 1 захвата установлен силовой цилиндр 2 с силовой пружиной 3, шток-рейка 4 которого находится в зацепленииС двумя рычагами 5, расположенными на осях 6, и несет на себе упорные гайки 7. На рычагах 5 закреплены кронштейны 8, снабженные направляющими ребордными роликами 9, которые поддерживают в вертикальном положении планки 10, опирающиеся на кронштейнй 8 уступами. Стальные губки 11 выполнены в виде полуколец и приварены к нижней части планок 10
Захват работает следующим образом. В силовой цилиндр 2 подается рабочая среда. Шток-рейка 4 выдвигается, поворачивая рычаги 5 на осях 6. Пружина 3 при этом сжимается. Закрепленные на рычагах 5 кронштейны 8 с планками 10 быстро расходятся, размыкая губки 11.
Рука робота опускает захват вниз к детали, например к раскаленной керамической литейной форме. В случае, когда высота литейной формы больше номинальной, губки 11, достигнув ее поверхности, перемещают
5 планки 10 относительно кронштейнов 8 вверх, пока рука робота не остановится.
Система управления робота соединяет поршневую полость силового цилиндра через дроссель со сливной трубой и под действием усилия пружины 3 происходит процесс медленного смыкания губок 11, пока упорные гайки 7 не коснутся поверхности корпуса
5 1. Сомкнутые губки 11 не касаются поверхности литейной формы (фиг. 1).
Рука робота с захватом начинает подниматься вверх. При этом сначала планки 10 с сомкнутыми губками 11 остаются на поверхности керамической формы, пока кронштейны 8 не подхватят планки 10 под их уступы, затем по мере подъема захвата губки приближаются к бурту горловины формы и захват уносит раскаленную керамическую литейную форму, которая опирается буртом горловины на губки 11.
Захват удерживает форму за счет усилия пружины 3 и поэтому нет опасности, что форма с залитым в нее металлом упадет при аварийном Падении давления рабочей среды.
Фаг. 2
/4-/;
(Pl/t.j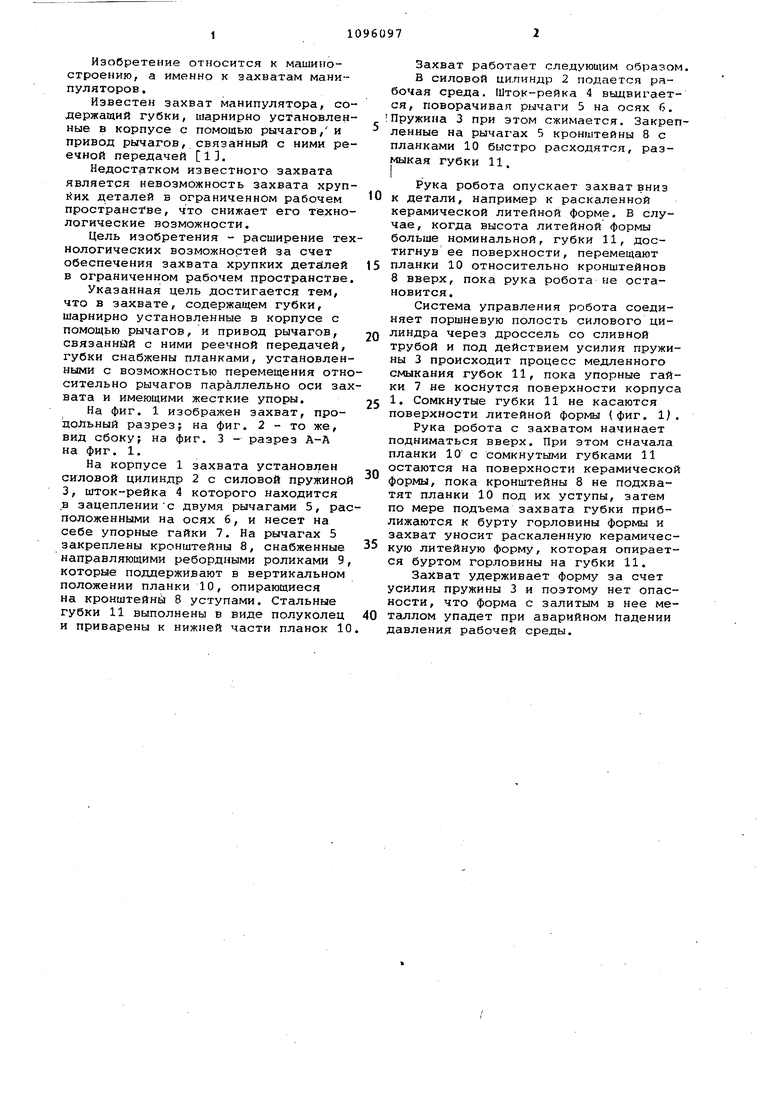
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1289679A1 |
| Захват | 1977 |
|
SU667396A1 |
| Укладчик форм | 1986 |
|
SU1382586A1 |
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Устройство для резки труб | 1986 |
|
SU1375414A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват промышленного робота | 1982 |
|
SU1066801A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
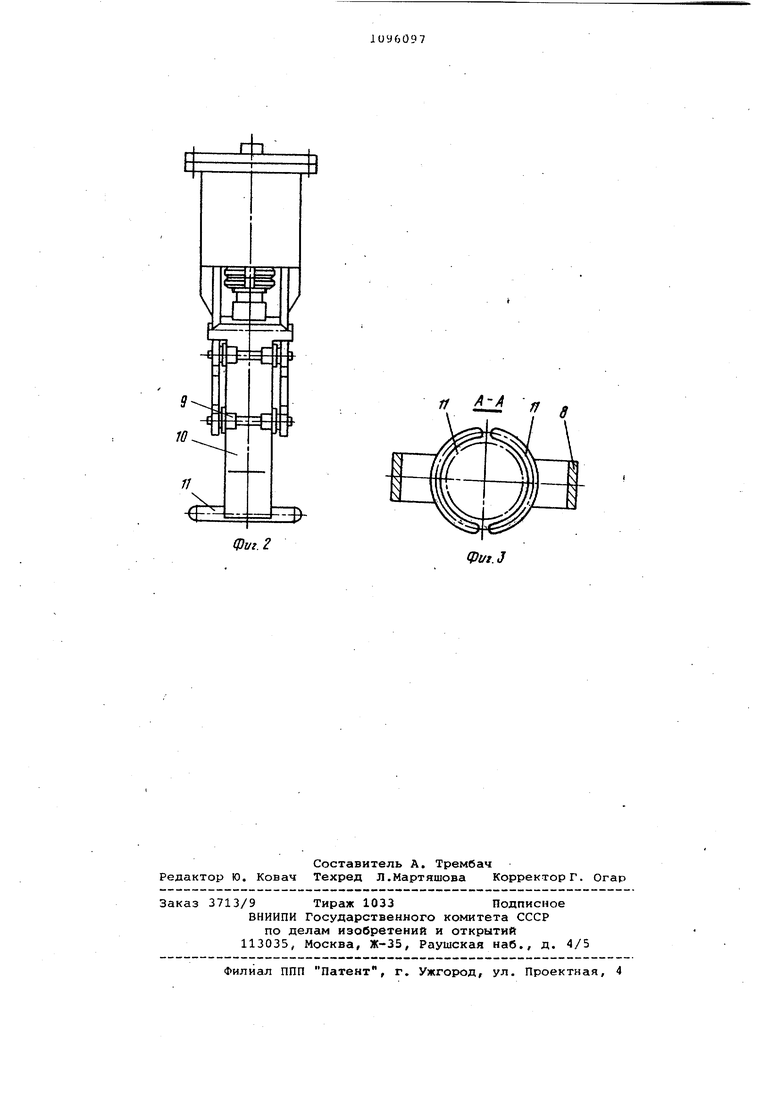
ЗАХВАТ, содержащий губки, шарнирно установленные в корпусес помощью рычагов, и привод рычагов, связанный с ними реечной передачей, отличающи.йся тем, что, с целью расширения его технологических возможностей за счет обеспечения захвата хрупких деталей в ограниченном рабочем пространстве, губки снабжены планками, установленными с возможностью перемещения относительно рычагов параллельно оси захвата и имеющими жесткие упоры. (Л о со 05 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
