(54) АВТОМАТИЧЕСКИЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1098791A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных коробок | 1988 |
|
SU1521552A2 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Загрузочное устройство | 1982 |
|
SU1121122A1 |
| Устройство для шагового перемещения спутников | 1985 |
|
SU1305085A1 |
| Гибкая линия для механической обработки деталей типа станин электродвигателей | 1988 |
|
SU1701484A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Многопозиционный автомат для сборки узлов | 1990 |
|
SU1779530A1 |


Изобретение относится к манипуляторостроению и предназначено для автоматизации различных технологических операций.
Известны манинуляторы, содержащие схват и узлы ориентации деталей (I).
Недостатком таких манипуляторов является невозможность точной фиксации деталей при захвате их за необработанные поверхности.
Цель изобретения - устранение указанного недостатка.
Это достигается за счет того, что в предлагаемом манипуляторе узлыориентации снабжены фиксирующими устройствами, каждое из которых выполнено в виде однополостного силового цилиндра с двусторонним штоком, к одному концу которого жестко присоединен базовый штырь, ко второму - упор, в порщне помещена цанга, а в нерабочей полости между торцом поршня и дном цилиндра размещена пружина,
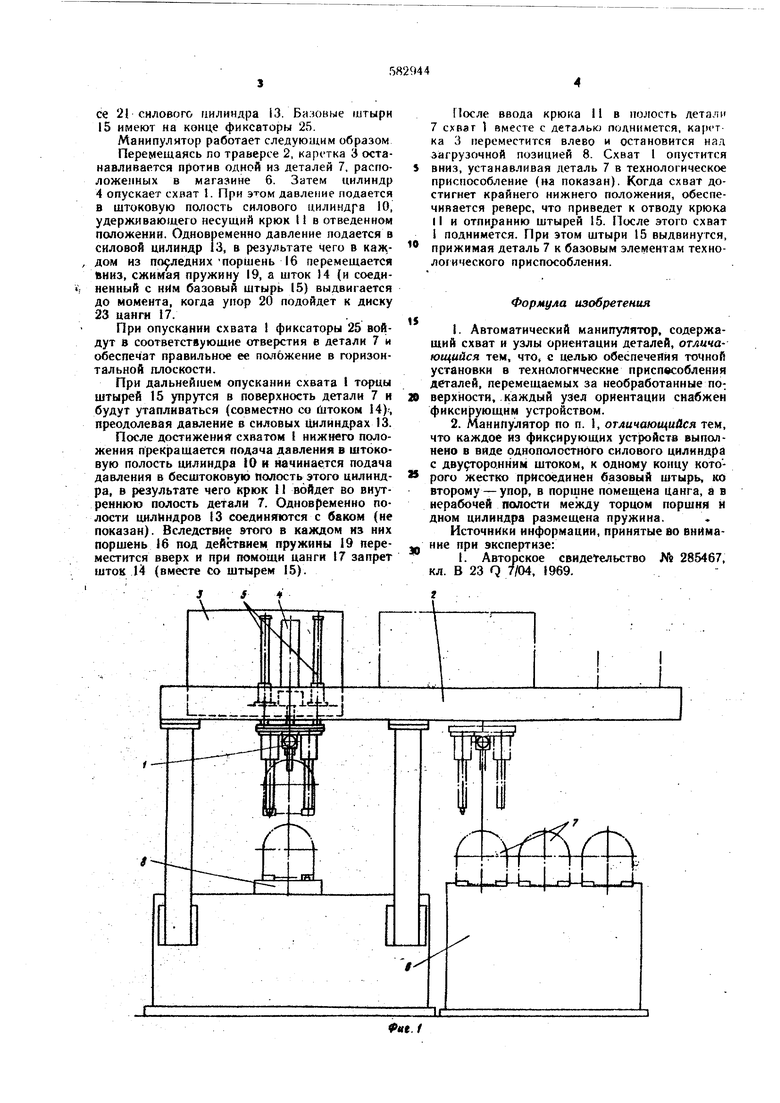
На фиг. I представлен описываемый манипулятор, общий вид; на фиг. 2 - схват в рабочем положении; на фиг. 3 - разрез А - А фнг. .
Автоматический манипулятор содержит схват 1 и узлы его ориентации, состоящие из расположенной на траверсе 2 каретки 3, осуществляющей горизонтальные перемещения
схвата 1, и размещенного на каретке 3 силового цилиндра 4 вертикального перемещения, на штоке которого установлен этот схват. Скалки 5 служатнаправляющими при вертикальном перемещении схвата I, обеспечивая ему строго поступательный характер движения. В магазине б расположены детали 7, подлежащие переносу на загрузочную позицию 8.
Схват 1 содержит рамку 9, на которой установлен силовой цилиндр 10, связанный с несущим крюком 11 через рычаг 12.
На рамке 9 также расположены узлы ориентации деталей 7 с фиксирующими устройствами, каждое из которых выполнено в внде однополостного силового цилиндра 13 с двусторонним штоком 14, к одному концу которого жестко присоединен базовый штырь 15, упирающийся в транспортируемую деталь 7. В порщне
16помещена цанга 17, охватывающая шток 14, причем на последнем в нерабочей полости между торцом поршня 16 и дном 18 силового цилиндра 13 размещена пружина 19, а на втором конце штока 14 выполнен упор 20. Цанга
17закренлена в корпусе 21 фланцем 22. Осевое перемеи;ение штока 14 ограничивается .упором 20, контактирующим с фланцем 22 или диском 23 цанги 17. Штуцер 24 рэйпеложен в корнусе 2J силового цилиндра 13. Вязовые штыри 15 имеют на конце фиксаторы 25.
Манипулятор работает следующим образом
Перемещаясь ло траверсе 2, каретка 3 останавливается против одной из деталей 7, расположенных в магазине 6. Затем цилиндр 4 опускает схват 1. При этом давление подается в штоковую полость силового цилиндра 10, удерживающего несущий крюк 11 в отведенном положении. Одновременно давление подается в силовой цилиндр 13, в результате чего в каждом из последнихпоршень 16 перемещается низ, сжимая пружину 19, а шток И (и соединенный с ним базовый штырь 15) выдвигается до момента, когда упор 20 подойдет к диску 23 цангн 17.
При опускании охвата 1 фиксаторы 25 войдут в соответствующие отверстия б детали 7 и обеспечат правильное ее положение в п)ризонтальной плоскости.
При дальнейшем опускании схвата I торцы штырей 15 упрутся в поверхность детали 7 и будут утапливаться (совместно со Штоком 14)-, преодолевая давление в силовых цилиндрах 13.
После достижение схватом I нижнего положения прекращается подача давления в штоковую полость цилиндра 10 и начинается подача давления в бесштоковую полость этого цилиндра, в результате чего крюк 11 войдет во внутреннюю полость детали 7. Одновременно полости цилиндров 13 соединяются с баком (не показан). Вследствие зтого в каждом из них поршень 16 под действием пружины 19 переместится вверх и при помощи цанги 17 запрет шток 14 (вместе со штырем 15).
После ввода крюка 11 в полость детали 7 схваг 1 вместе с деталью поднимется, каретка 3 переместится влево и остановится нал загрузочной позицией 8. Схват 1 опустится вниз, устанавливая деталь 7 в технологическое приспособление (на показан). Когда схват достигнет крайнего нижнего положения, обеспечивается реверс, что приведет к отводу крюка |1 и отпиранию штырей 15. После этого схвят I поднимется. При этом штыри 15 выдвинутся, прижимая деталь 7 к базовым элементам технологического приспособления.
Формула изобретения
Источники информации, принятые во внимание при экспертизе:
I. Авторское свидетельство № 285467, кл. В 23 Q 7/04, 1969.
Фм.г
