Изобретение относится к промышленному транспорту, в частности к конвейерным распределительно-сборочнымсистемам,
например, роликовым и может быть использовано для автоматических и поточных технологических линий, экспедиций автоматических складов, где для изменения направления перемещения деталей и тарно-штучных грузов, особенно грузов различных масс, или для передачи грузов на другие виды транспорта требуется повышенная точность инадежность останова.
Известно устройство для управления конвейером, содержащее датчики, симметрично расположенные Относительно центра участка останова конвейера, элементы И, ИЛИ, памяти и блок нереверсивного электропривода 1.
Недостаток этого устрдйства - низкое быстродействие и малая точность позиционирования.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для управления конвейером, содержащее 0лок адресования, один из выходов которого подключен к одному из входов элемента И, соединенного выходом с единичным входом элемента памяти, выход которого подключен к одному из входов элемента ИЛИ, датчик точного останова и блок реверсивного электропривода 2.
Недостатком известного устройства является замедление скорости перемещения груза перед остановом, что снижает быстродействие, и малая точность останова.
Цель изобретения - повышение быстродействия и точности останова.
Поставленная цель достигается тем, что устройство для управления конвейером, содержащее блок адресования, один из выходов которого подключен к одному из входов элемента И, соединенного выходом с единичным входом элемента памяти, выход которого подключен к одному из входов элемента ИЛИ, датчик точного останова и блок реверсивного электропривода, снабжено датчиком реверсирования, дополнительным элементом памяти и дополнительным элементом ИЛИ, причем датчик реверсирования установлен по ходу движения груза после датчика точного останова, единичный вход дополнительного элемента памяти соединен с другим выходом блока адресования, нулевой вход - с выходом элемента ИЛИ, а выход - с одним из входов блока реверсивного электропривода и с одним из входов дополнительного элемента ИЛИ, другой вход которого подключен к датчику точного останова, а выход - к нулевому входу элемента памяти, соединенного выходом с другим входом блока реверсивного электропривода, датчик реверсирования соединен с другим входом элемента И, выход которого подключен к другому входу элемента ИЛИ.
На чертеже изображена блок-схема устройства.
Устройство содержит блок 1 адресования, один изВЫХОДОВ которого подключен к одному из входов элемента И 2, соединенного выходом с единичным входом элемента 3 памяти, выход которого подключен
к одному из входов элемента ИЛИ 4.
Единичный вход элемента 5 памяти соединен с другим входом блока адресования, нулевой вход - с выходом элемента ИЛИ 4, а выход - с одним из входов блока 6 реверсивного электропривода и с одним
из входов элемента ИЛИ 7, другой вход которого подключен к датчику 8 точного останова, а выход - к нулевому входу элемента 3 памяти, соединенного выходом с другим входом блока 6 реверсивного электропривода. Датчик 9 реверсирования соединен с другим входом элемента И 2, подключенного выходом к другому входу элемента ИЛИ 4 и установлен по ходу движения груза после датчика 8 точного останова с возможностью взаимодействия с грузом. Датчик точного останова устанавливается с возможностью взаимодействия непосредственно с грузом или с помощью упора 10, выполненного в виде собачки для фиксации положения грузов различных масс.
Устройство работает следующим образом.
При задании позиции останова блок 1 адресования посылает сигнал на один из входов элемента И 2. Пусковой сигнал блока 1 адресования устанавливает элемент 5 памяти в единичное состояние и его выходной сигнал через элемент ИЛИ 7 появляется на нулевом входе элемента 3 памяти, а также включает блок 6 реверсивного электропривода. Груз, перемещаясь по конвейеру, например, в прямом направлении (указано
стрелкой) проходит упор 10 и взаимодействует с датчиком 8 точного останова, сигнал которого подается на вход элемента ИЛИ 7 и подтверждает нулевое состояние элемента 3 памяти.
Если расстояние между датчиком 8 точного останова и датчиком 9 реверсирования больше длины груза, последний проходит датчик 8 и затем взаимодействует с датчиком 9 (поочередное взаимодействие с датчиками) .
После исчезновения сигнала датчика 8
точного останова появляется сигнал датчика 9 реверсирования на другом входе элемента И 2, выходной сигнал которого через элемент ИЛИ 4 устанавливает элемент 5 памяти в нулевое состояние. Блок б реверсивного электропривода отключается. С исчезновением выходного сигнала элемента 5 памяти на входе элемента ИЛИ 7 элемент 3 памяти сигналом элемента И 2
устанавливается в единичное состояние. Выходной сигнал элемента 3 памяти через элемент ИЛИ 4 подтверждает нулевое состояние элемента 5 памяти и включает блок 6 реверсивного электропривода в обратном направлении.
Груз после выбега в прямом направлении определяемом динамикой движения и эффективностью торможения реверсированием конвейера, возвращается к датчику 8 точного останова. В период ускорения, но до момента достижения установленной номинальной скорости, груз вновь взаимодействует с дат чиком 8 точного останова, который выходным сигналом через элемент ИЛИ 7 устанавливает элемент 3 памяти в нулевое состояние. Блок 6 реверсивного электропривода отключается, и груз после торможения останавливается с выбегом, меньшим, чем при движении в прямом направлении, удовлетворяющим требованиям высокой точности останова.
Если расстояние между датчиками точного 8 останова и реверсирования 9 меньще длины груза в процессе одновременного взаимодействия груза с датчиками, сигнал датчика 9 реверсирования через элемент ИЛИ 4 устанавливает элемент 5 памяти в нулевое состояние. Блок 6 реверсивного электропривода отключается и происходит плавное торможение груза.
Включение блока 6 реверсивного электропривода в обратном направлении осуществляется только после того, как груз с учетом выбега в прямом направлении пройдет датчик 8 точного останова в том же
порядке, что и при поочередном взаимодействии груза с датчиками. Аналогично описанному выше происходит отключение блока 6 реверсивного электропривода при обратном движении и точный останов груза.
|Величина обратного выбега груза и разброс определяются требованиями точного останова и регулируются положениями датчиков с учетом скорости, массы и особенностей перемещаемого груза, а также конструктивных особенностей и динамики конвейера.
Для дополнительного сокращения величины обратного выбега грузов и фиксации останова (особенно для грузов перемещенных масс) используется упор 10 в виде собачки, который пропускает грузы в прямом направлении и останавливает их в обратном.
Изменением места расположения датчиков и расстояния между ними легко достигается выбор позиции останова и минимальной величины выбега груза и ее разброса. Это позволяет регулировать точность останова в заданном допуске с оптимизацией временных и энергетических показателей
процесса останова. Особенно эффективно использование устройства в автоматических и поточных линиях, в которых для межоперационной передачи деталей и изделий применяют роликовые конвейеры, где оно позволяет полностью автоматизировать операции останова в заданном производственном ритме, снизить энергетические и эксплуатационные расходы, повысить надежность.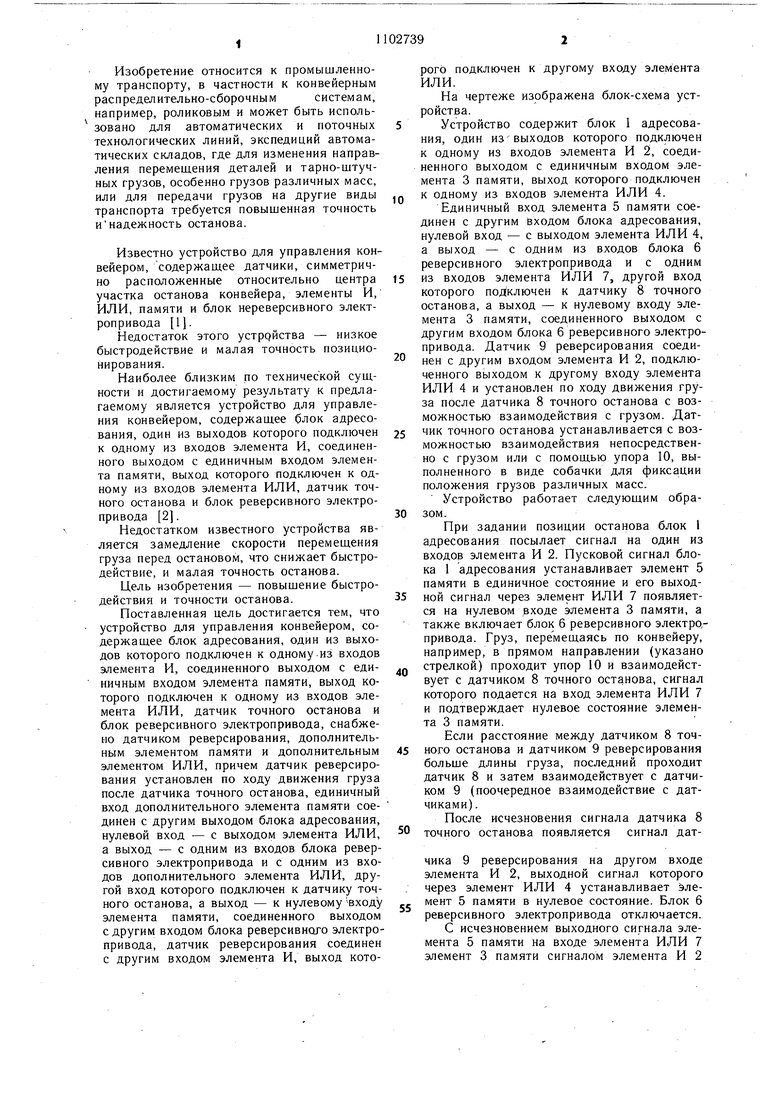

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для управления распределительно-сборочным конвейером | 1977 |
|
SU737324A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| Устройство для управления транспортной системой | 1989 |
|
SU1652251A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство для управления транспортными средствами | 1988 |
|
SU1589291A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ | 1973 |
|
SU368611A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНВЕЙЕРО/Н, содержащее блок адресования, один из выходов которого подключен к одному из входов элемента И, соединенного выходом с единичным входом элемента памяти, выход которого подключен к одному из входов элемента ИЛИ, датчик точного останова и блок реверсивного электропривода, отличающееся , что, с целью повышения быстродействия и точности позиционирования, оно снабжено датчиком реверсирования, дополнительным элементом памяти и дополнительным элементом ИЛИ, причем датчик реверсирования установлен по ходу движения груза после датчика точного останова, единичный вход дополнительного элемента памяти соединен с другим выходом блока адресования, пулевой вход - с выходом элемента ИЛИ, а выход - с одним из входов блока реверси)ного электропривода и с одним из входов дополнительного элемента ИЛИ, другой вход которого подключен к датчику точного останова, а выход - к нулевому входу элемента памяти, соединенного выходом с другим входом блока реверсивного электропривода, датчик реверсирования соединен с другим входом элемента И, выход кото- S рого подключен к другому входу элемер|та ИЛИ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения малоуглеродистого и безуглеродистого феррохрома с азотом | 1956 |
|
SU108953A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления транспортером | 1971 |
|
SU461874A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
