сл ю
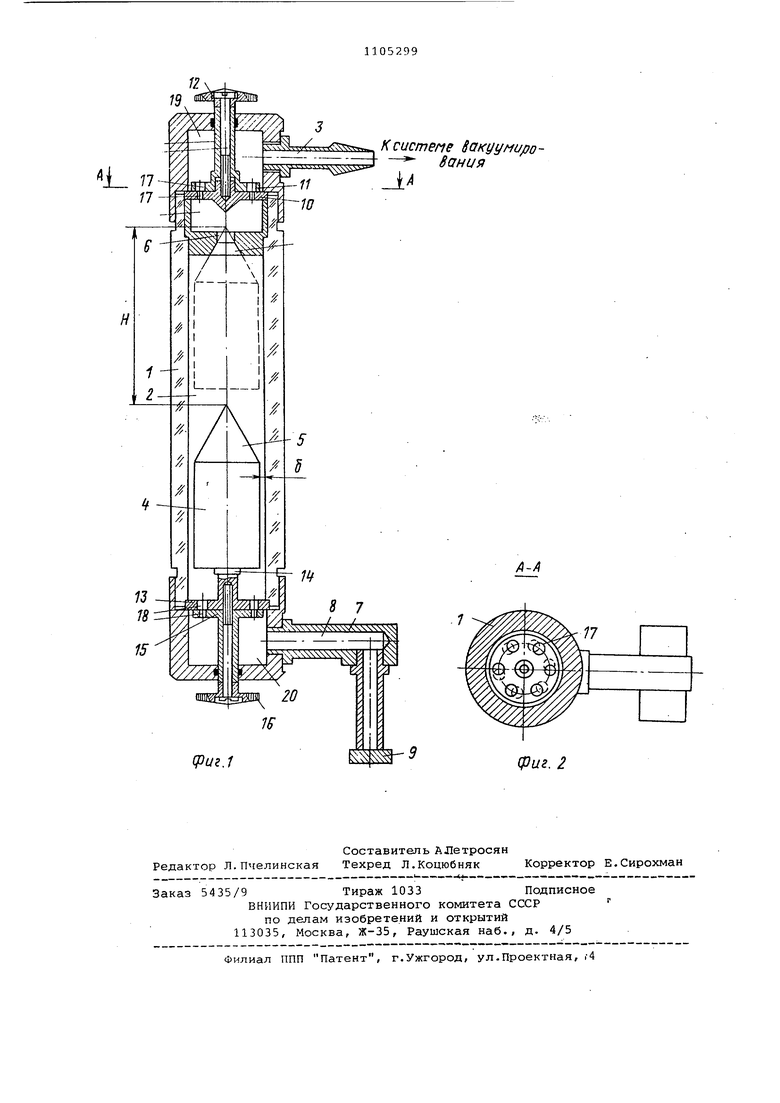
со Изобретение относится к вакуумным захватам для автоматической подачи деталей на рабочую позицию. Известен вакуумный захват, содер жащий корпус с каналом для вакуумнрования 11. Недостатком вакуумного захвата является низкая надежность, обуслов ленная постоянным подсасыванием воз духа между деталью и корпусом захвата. Наиболее близок к предлагаемому вакуумцый захват содержащий корпуо с цилиндрической полостью и каналом для вакуумирования, цилиндрический с конусной головкой клапан с седлом и размещенный в полости корпуса с зазором относительно его стенок и прикрепленный к -корпусу, запирающий держатель, канал которого сообщен с полостью корпуса 2. Однако известный вакуумный захват не позволяет без дополнительной переналадки регулировать усилие захвата деталей и время его срабатывания. Кроме того быстрый износ его де талей обусловлен ударными нагруз.ками возникающими при срабатывании клапана. Цель изобретения - улучшение эксплуатационных свойств захвата. Поставленная цель достигается тем что вакуумный захват, содержащий кор пус с цилиндрической полостью и каналом для вакуумирования, цилиндрической полостью и каналом для вакуумирования, цилиндрический с конусной головкой клапан с седлом и размещенный в полости корпуса с зазо ром относительно его стенок и прикре ленный к корпусу запирающий держатель, канал которого сообщен с полостью корпуса, снабжен двумя устано ленными в полости корпуса регулятора ми, первый из которых размещен между седлом клапана и каналом для вакуумирования, а второй - между торцом клапана и каналом держателя и имеет опору для ограничения перемещения клапана, каждый регулятор выполнен в виде соосно установленных и контакти рующих друг с другом дисков, имеющих равномерно распределенные на окружно стях соосные отверстия, при этом один диск жестко прикреплен по периметру к корпусу, а другой установлен с возможностью поворота вокруг своей На фиг. 1 представлен вакуумный захват, общий вид в разрезе на фиг. 2 - разрез А-А на фиг. 1. Вакуумный захват содержит корпус с цилиндрической полостью 2 и каналом 3 для Бакуумирования с системой вакуумирования (не показана. В полости 2 корпуса 1 с зазором разг/ющен клапан 4 с конусной головкой 5 и седлом 6. Держатель 7 с канапом 8 служит для захвата детали 9. Между каналом 3 и седлом 6 размещен регулятор, выполненный в виде диска 10, жестко прикрепленного по периметру к корпусу 1, и контактирующего с диском 10 диска 11, установленного с возможностью поворота вокруг своей оси поворотным винтом 12. Между клапаном 4 и каналом 8 размещен регулятор, выполненный в виде жестко прикрепленного к корпусу 1 по периметру диска 13 с опорой 14 для ограничения перемещения клапана 4 и диска 15, установленного с возможностью поворота вокруг своей оси поворотным винтом 16. В дисках 10 И11 выполнены равномерно распределенные на окружностях соосные отверстия 17, а в дисках 13 и 15 - отверстия 18. Диски 10 и 13 со стенками корпуса 1 образуют полости 19 и 20. Предлагаемый вакуумный захват работает следующим образом. Подключают канал 3 к системе вакуумирования. С помощью поворотных винтов 12 и 16 вращают диски 11 и 15 вокруг своей оси, регулируя величину проходных сечений отверстий 17 и 18. Таким образом устанавливают заданный перепад давлений в полости 2, 19 и 20. Захватывают деталь 9 и переносят ее в нужную зону. При этом клапан 4 опирается своим торцом на опору 14. При отсутствии детали 9 на держателе 7 поток воздуха перемещает клапан Л к седлу 6, перекрывая его конусной головкой 5, таким образом вакуумный захват отключают от системы вакуумирования. Для захвата очередной детали . в канал 3 подают воздух под атмосферным давлением.Клапан 4 перемещается к опоре 14, в течение заданного времени. Изобретение позволяет улучшить эксплуатационные свойства вакуумного захвата, регулировать величину захватного усилия, а также исключить . ударные нагрузки, обусловленные перемещением клапана при его срабатывании, так как регулирование проходных сечений и установка дисков регуятора между каналом для вакуумирования и седлом клапана, а также межу каналом держателя и клапаном позволяет установить перепады давлений о всей длине полости корпуса, обесечивающие плавное перемещение клаана при захвате очередной детали, также в случае срыва детали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1983 |
|
SU1131642A1 |
| Вакуумный захват | 1982 |
|
SU1033303A1 |
| Вакуумный захват | 1982 |
|
SU1046079A1 |
| Вакуумный захват | 1981 |
|
SU952568A1 |
| Вакуумный захват | 1981 |
|
SU1105297A1 |
| Вакуумный схват | 1984 |
|
SU1201118A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1162725A1 |
| Вакуумный захват | 1976 |
|
SU567596A1 |
| ГИДРОСИСТЕМА ЭЛЕКТРОКАПЛЕСТРУЙНОГО ПРИНТЕРА И ЕЕ ЭЛЕМЕНТЫ | 2002 |
|
RU2212633C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА | 2002 |
|
RU2217788C1 |
ВАКУУМНЫЙ ЗАХВАТ, содержащий корпус с цилиндрической полостью и каналом для вакуумирования, цилиндрический с конусной головкой клапан с седлом и .размещенный в полости корпуса с зазором относительно его стенок и прикрепленный к корпусу запирающий держатель, канал которого сообщен с полостью корпуса, отличающийся тем, что, с целью улучшения эксплуатационных свойств, он снабжен двумя установленными в по лости корпуса регуляторами, первый из которых размещен межцу седлом клапана и каналом для вакуумирования,а второй - между торцом клапана и каналом держателя и имеет, опору для ограничения перемещения клапана, каждый регулятор выполнен в виде двух соосно установленных и контактируюй1их друг с другом дисков, имеющих равномерно распределенные на окружностях о соосные отверстия, при этом один диск: 5S Жестко прикреплен по периметру к корпусу, а другой установлен с возможностью поворота вокруг своей оси.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ КРИОКОНСЕРВАЦИИ ЗАГОТОВЛЕННОЙ ТКАНИ МЛЕКОПИТАЮЩИХ ИЛИ КУЛЬТИВИРОВАННОГО ЭКВИВАЛЕНТА ТКАНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2178865C2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вакуумный захват | 1976 |
|
SU567596A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
