2. Автомат по п.1,отли- - 3. Автомат по п.1, о тличаючающийся тем, что фрик- щ и и с я тем, что фрикционные элеционные элементы выполнены в ни- менты вьтолнены в виде цилиндричесде цанги.. ких сегментов.
1106633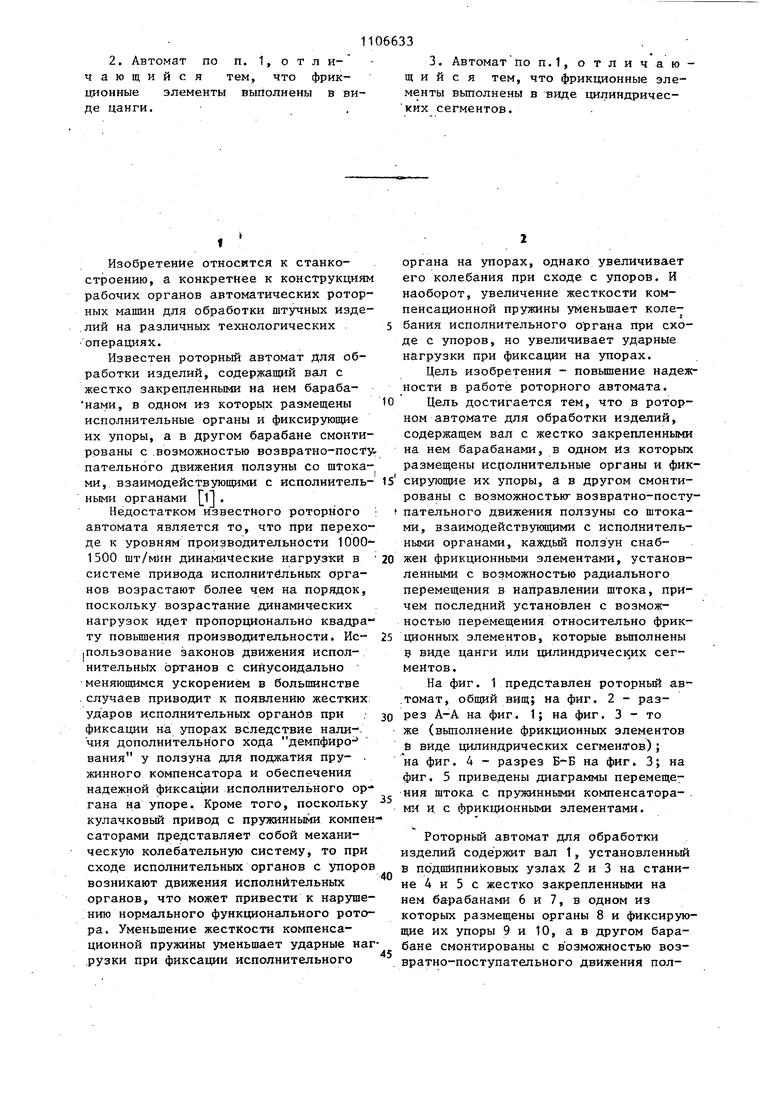
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Роторно-конвейерная линия | 1987 |
|
SU1706837A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Роторный автомат питания | 1986 |
|
SU1340982A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Контрольно-сортировочное устройство | 1980 |
|
SU937055A1 |
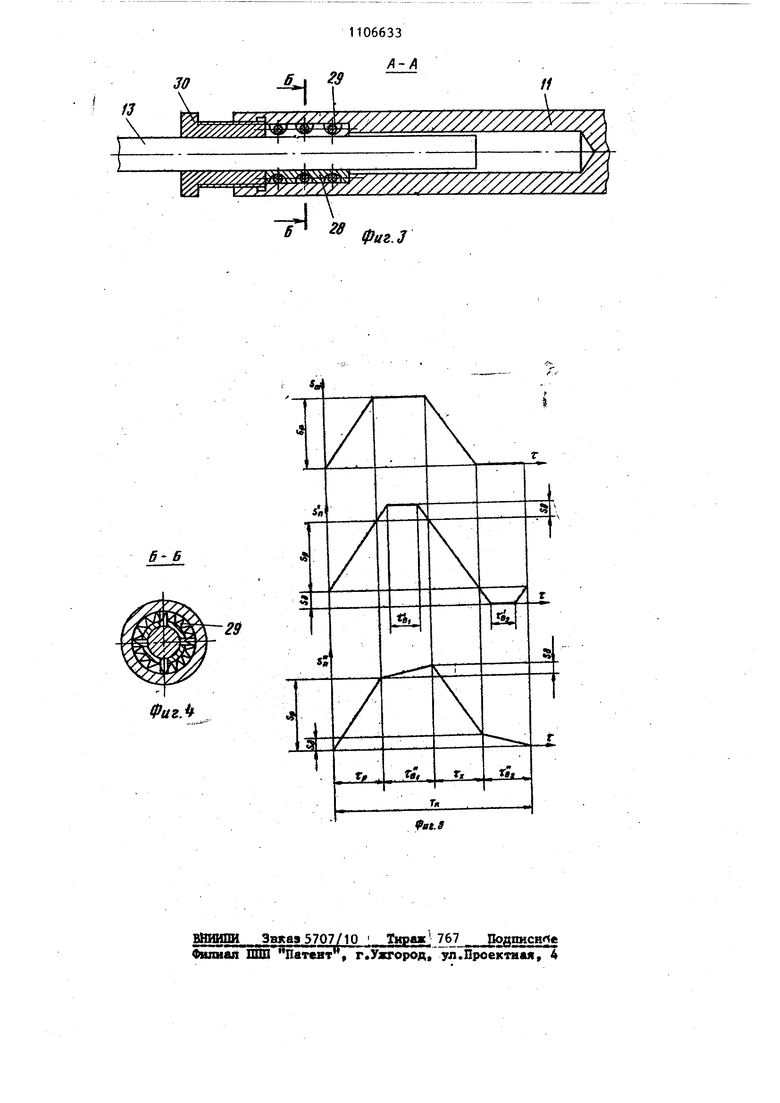
1. РОТОРНЫЙ АВТОМАТ ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ, сбдерАащий вал с жестко закрепленными на нем барабанами, в одном из Которых размещены исполнительные органы и фиксирующие их упоры, а в другом смонтированы с возможностью возвратно-поступательного движения ползуны со штоками, взаимодействующими с исполнительными органами, отличающийся .тем, что, с целью повьппения надежности в работе автомата, каждый ползун снабжен фрикционными элементами, установленными с возможностью радиального перемещения в направлении штока, причем последний установлен с возможностью перемещения относительно фрикционных элементов. i (Л № О) О) со 00
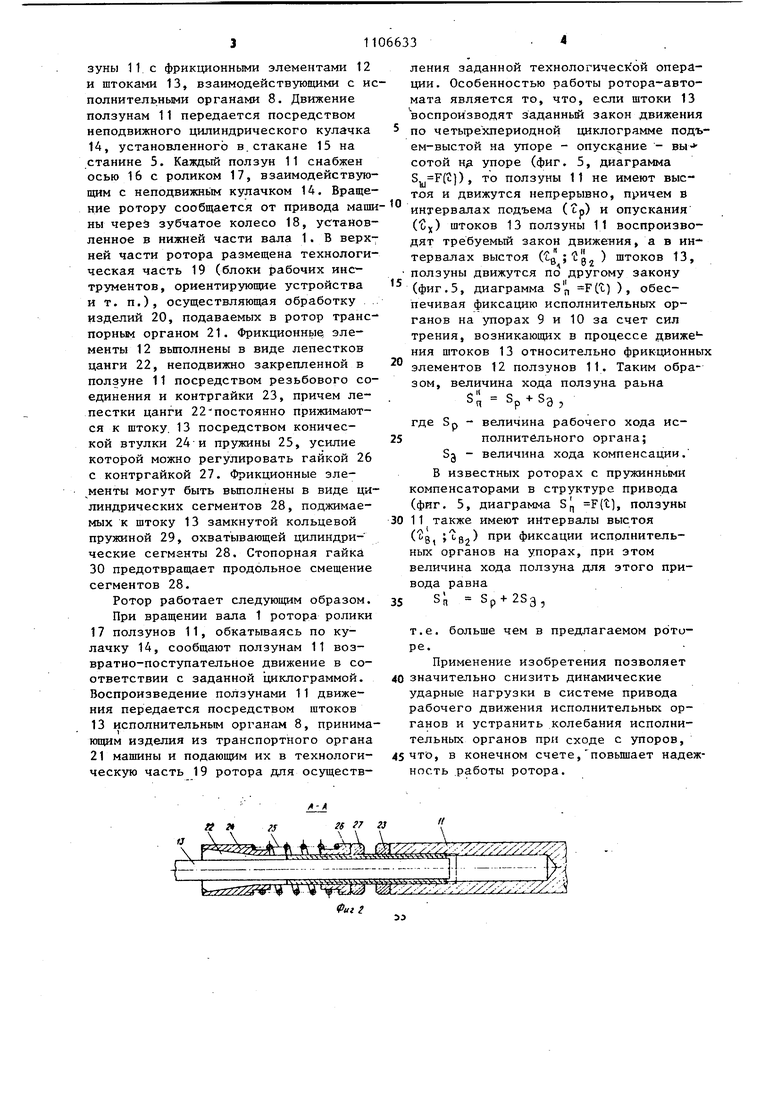
Изобретение относится к станкостроению, а конкретнее к конструкциям рабочих органов автоматических роторных машин для обработки штучных изде.ЛИЙ на различных технологических операциях. Известен роторный автомат Для обработки изделий, содержащий вал с жестко закрепленными на нем барабанами, в одном и-з которых размещены исполнительные органы и фиксирующие их упоры, а в другом барабане смонтированы с .возможностью возвратно-посту пательного движения ползуны со штоками, взаимодействующими с исполнительными органами ll . Недостатком известного роторного автомата является то, что при переходе к уровням производительности 10001500 шт/мин динамические нагрузки в системе привода исполнительных органов возрастают более чем на порядок, поскольку возрастание динамических Нагрузок идет пропорционально квадра ту повышения производительности. Ис|Пользование законов движения исполнительнь1х органов с синусоидально меняющимся ускорением в большинстве .случаев приводит к появлению жестких; ударов исполнительных органбв при . фиксации на упорах вследствие нали-, чия дополнительного хода демпфиро- вания у ползуна для поджатия пру- . жинного компенсатора и обеспечения надежной фиксации исполнительного органа на упоре. Кроме того, поскольку кулачковый привод с прзгжинными компен саторами представляет собой механическую колебательную систему, то при сходе исполнительных органов с упоров возникают движения исполнительных органов, что может привести к нарушению нормального функционального ротора. Уменьшение жесткости компенсационной пружины уменьшает ударные наг рузки при фиксации исполнительного органа на упорах, однако увеличивает его колебания при сходе с упоров. И наоборот, увеличение жесткости компенсационной пружины уменьшает колебания исполнительного органа при сходе с упоров, но увеличивает ударные нагрузки при фиксации на упорах. Цель изобретения - повьшхение надежности в работе роторного автомата. Цель достигается тем, что в роторном автомате для обработки изделий, содержащем вал с жестко закрепленными на нем барабанами, в одном из которых размещены исролнительные органы и фиксирующие их упоры, а в другом смонтированы с возможностькг возвратно-поступательного движения ползуны со штоками, взаимодействующими с исполнительными органами, каждый ползун снабжен фрикционными элементами, установленными с возможностью радиального перемещения в направлении штока, причем последний установлен с возможностью перемещения относительно фрикционных элементов, которые выполнены 5 виде цанги или цилиндрическ их сегментов. На фиг. 1 представлен роторный ав.томат, вищ; на фиг, 2 - разрез А-А на фиг, 1; на фиг. 3 - то же (вьшолнение фрикционных элементов В виде цилиндрических сегмен.Тов) ; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг, 5 приведены диаграммы перемещения штока с пружинными компенсатора- . ми и. с фрикционными элементами. Роторный автомат для обработки изделий содержит вал 1, установленный в пбдшипниковых узлах 2 и 3 на станине 4 и 5 с жестко закрепленными на нем барабанами 6 и 7, в одном из которых размещены органы 8 и фиксирующие их упоры 9 и 10, а в другом барабане смонтированы с возможностью возвратно-поступательного движения ползуны 11с фрикционными элементами 12 и штоками 13, взаимодействующими с и полнительными органами 8. Движение ползунам 11 передается посредством неподвижного цилиндрического кулачка 14, установленного в.стакане 15 на станине 5. Каждый ползун 11 снабжен осью 16 с роликом 17, взаимодействую щим с неподвижньм кулачком 14. Враще ние ротору сообщается от привода маш ны череа зубчатое колесо 18, установ ленное в нижней части вала 1. В верх ней части ротора размещена технологи ческая часть 19 (блоки рабочих инструментов, ориентирующие устройства и т. п.), осуществляющая обработку изделий 20, подаваемых в ротор транс порным органом 21. Фрикционные элементы 12 вьтолнены в виде лепестков цанги 22, неподвижно закрепленной в ползуне 11 посредством резьбового соединения и контргайки 23, причем лепестки цанги 22постоянно прижимаются к штоку. 13 посредством конической втулки 24И пружины 25, усилие которой можно регулировать гайкой 26 с контргайкой 27. Фрикционные элементы могут быть выполнены в виде цилиндрических сегментов 28, поджимаемых к штоку 13 замкнутой кольцевой пружиной 29, охватывающей цилиндрические сегменты 28. Стопорная гайка 30 предотвращает продольное смещение сегментов 28. Ротор работает следующим образом. При вращении вала 1 ротора ролики 17 ползунов 11, обкатываясь по кулачку 14, сообщают ползунам 11 возвратно-поступательное движение в соответствии с заданной циклограммой. Воспроизведение ползунами 11 движения передается посредством штоков 13 исполнительным органам 8, принимающим изделия из транспортного органа 21 машины и подающим их в технологическую часть 19 ротора для осуществления заданной технологической операции. Особенностью работы ротора-автомата является то, что, если штоки 13 воспроизводят заданный закон движения по четьфехпериодной циклограмме подъем-выстой на упоре - опускание - вы- сотой нд упоре (фиг. 5, диаграмма (с)), то ползуны 11 не имеют выстоя и движутся непрерывно, причем в интервалах подъема (ср) и опускания (Ох) штоков 13 ползуны 11 воспроизводят требуемый закон движения, а в интервалах ВЫСТОЯ , Q ) ШТОКОВ 13, ползуны движутся по другому закону (фиг.5, диаграмма s|, FCt) ), обеспечивая фиксацию исполнительных органов на упорах 9 и 10 за счет сил трения, возникающих в процессе движе ния штоков 13 относительно фрикционных элементов 12 ползунов 11. Таким образом, величина хода ползуна раьна s;; Sp-bSa, где Sp - величина рабочего хода исполнительного органа; Sg - величина хода компенсации. В известных роторах с пружинными компенсаторами в структуре привода (фиг. 5, диаграмма Sf, F{tl, ползуны 11 также имеют интервалы выстоя СЗц jigj) при фиксации исполнительных органов на упорах, при этом величина хода ползуна для этого привода равна Sj, Sp + 2S3, т.е. больше чем в предлагаемом ротое. Применение изобретения позволяет значительно снизить динамические дарные нагрузки в системе привода абочего движения исполнительных оранов и устранить колебания исполниельных органов при сходе с упоров, то, в конечном счете,повьшгает надежость .работы ротора.
/7/777/77/7/7////Ж 77
7/А/Ул z f vg vg
;5:
777777777777777777777 22222222222 2222222:
И -
1106633 A-A
фиг.З
«
Фиг.
tf.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU233407A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
