//7УУ/ /// /// ////////////////// /// /// /7/ /// //7 //
А
rv)
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее ходовое оборудование экскаватора | 1987 |
|
SU1434043A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1384692A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1342986A1 |
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1467142A1 |
| Механизм перемещения шагающего экскаватора | 1986 |
|
SU1331970A1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Механизм перемещения шагающего экскаватора | 1987 |
|
SU1465509A1 |
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1470878A1 |
| Шагающий экскаватор | 1987 |
|
SU1454918A1 |
| Гидропривод ходового оборудования шагающего экскаватора | 1983 |
|
SU1121366A1 |
Изобретение относится к шагающим экскаваторам и является усовершенствованием известного устройства. Цель - уменьшение энергоемкости перемещения. Для этого механизм перемещения имеет вертикальную направляющую 36 и двуплечие рычаги (Р) 29, 30 с опорными башмаками 25 и 26. Между собой и с гидроцилиндрами (Г) 1 подъема Р 29, 30 связаны шарниром 33. С плафтормой Р 29, 30 связаны шарнирами 31, 32. В штоке 5 Г 1 размещен дополнительный Г ,4 со штоком 6. Передача веса экскаватора на опорные башмаки 25 и 26 при его перемещении посредством Р 29, 30 позволяет при соответствующем подборе плеч этих Р осуществлять подъем и перемещение экскаватора двумя Г 1 и 4. При опускании башмаков 25 и 26 на грунт рабочая жидкость подается от насоса через распределитель управления и гидрозамок в Г 4. Ось шарнира , 33 поднимается, опора скольжения перемещается в вертикальных направляю- 36 и Р 25, 26 поворачиваются вокруг шарниров 31, 32. 4 ил. с S сл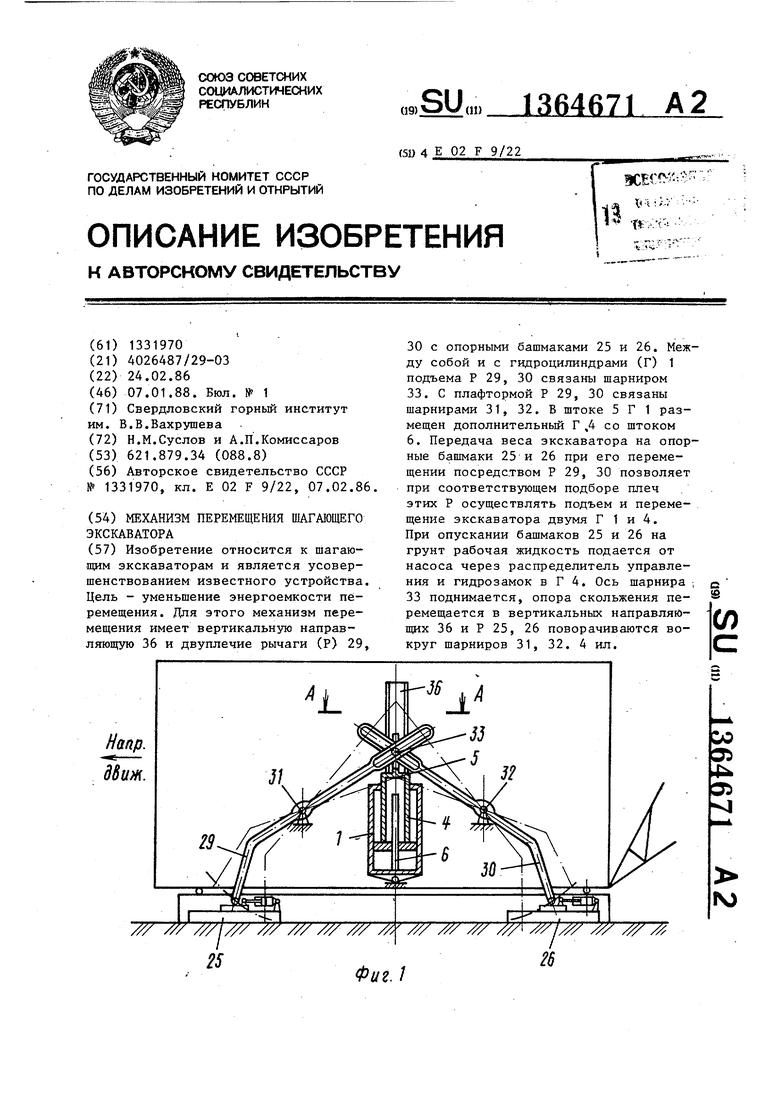
25
Фцг. 1
25
Изобретение относится к шагающим экскаваторам, в частности к механизмам их шагания, и является усовершенствованием известного устройства по авт.св. W 1331970.
Цель изо.бретения - уменьшение энергоемкости перемещения экскаватора.
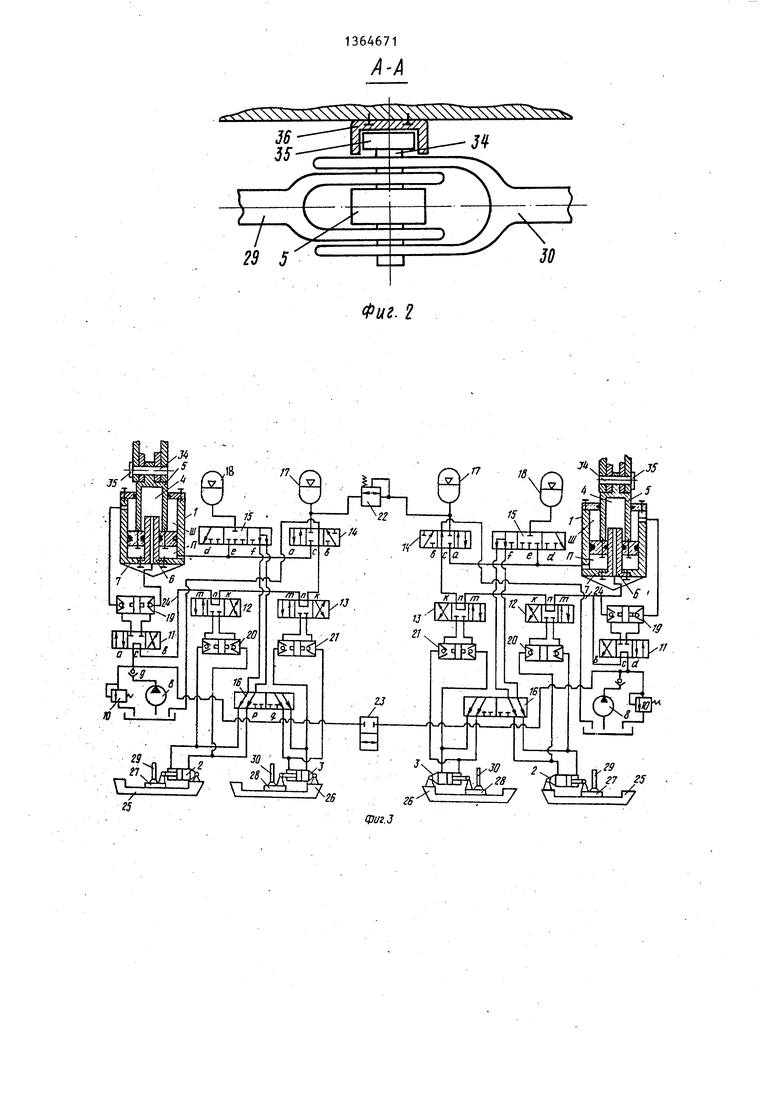
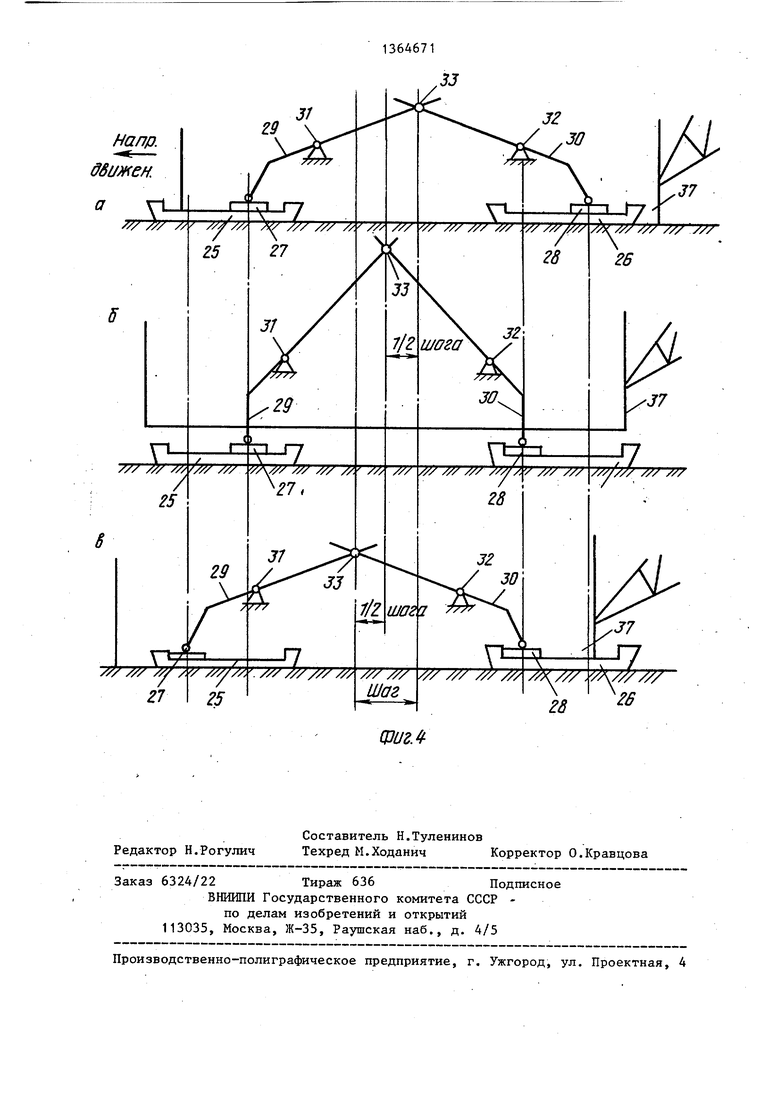
На фиг. 1 приведен механизм перемещения j на фиг. 2 - сечение А-А на фиг. 1 , на фиг. 3 - гидросистема механизма перемещения; на фиг. 4 - схема перемещения экскаватора.
Механизм перемещения включает гидроцилиндр 1-подъема башмаков, гидроцилиндры 2 и 3.перемещения башмаков, дополнительный гидроцилиндр 4, размещенный в штоке 5 гидроцилиндра 1 подъема и имеющий шток 6, закрепленный в днище 7 гидроцилиндра 1 подъема, насос 8, обратный клапан 9, пропускающий жидкость в одном направлении, разгрузочный клапан 10, распределители 11-16 управления, связывающие насос 8 с гидроцилиндрами 1 подъема, дополнительными гидроцилиндрами 4, гидроцилиндрами 2 и 3. Гидроаккумулятор 17 высокого давления подключен к поршневой полости гидроцилиндра 1, гидроаккумулятор 18 низкого давления - через распределители управления 15 и 16 к поршневым и Штоковым полостям гидроцилиндров 2 и 3, гидрозамки 19-21, автоматический разъединитель 22, связывающий гидроаккумуляторы 17 высокого давления правой и левой сторон ходового оборудования, вентиль 23, связывающий насосные установки 8 правой и левой сторон ходового оборудования, и трубопроводы 24. Опорные башмаки 2 и 26 размещены на каждой стороне ходового оборудования экскаватора и оснащены ползунами 27 и 28. Двуплечие рычаги 29 и 30, один из которых является дополнительным, шарнирно соединены концами коротких плеч с ползунами 27 и 28, а шарнирными соединениями 31 и 32 ,- с платформой экскаватора. Концы длинных плеч С и Д рычагов посредством шарнира 33 связаны с гидроцилиндрами 1 подъема. Ось 34 шарнира 33 соединена с опорой 35 скольжения, которая расположена в вертикальной направляющей 36 платформы экскаватора, установленной на базе 37 экскаватора.
Г
0
5
0
5
0
5
0
5
Механизм работает следующим образом.
При опускании опорных башмаков 25 и 26 на грунт рабочая жидкость подается от насоса 8 через распределитель 11 управления, гидрозамок 19 в дополнительный гидроцилиндр 4. Поршневая полость гидроцилиндра подъема заполняется в это время жидкостью, поступающей ot аккумулятора 18 низкого давления через распределитель 15 управления (позиция d). Из штоковой полости гидроцилиндра 1 подъема жидкость по трубопроводу через гидрозамок 19, распределители 11-14 управления (позиции Ь, п, п и с) поступает на слив. Ось шарнира 33 поднимается, при. этом опора 35 скольжения перемещается в вертикальных направляющих 36 платформы экскаватора, двуплечий рычаг 29 поворачивается вокруг шарнира 31 против часовой стрелки, а двуплечий рычаг 30 - вокруг шарнира 32 по часовой стрелке.
После касания опорными башмаками 25 и 26 грунта начинается подъем и перемещение экскаватора. При этом из аккумулятора 17 высокого давления рабочая жидкость через распределитель 14 управления (позиция а) по трубопроводу поступает в полость П гидроцилиндра подъема. В результате силы от веса экскаватора действующие на шток 5 гидроцилиндра подъема, уравновешиваются силами от давления жидкости в полости П. Дальнейшее выдвижение поршня 5 гидроцилиндра подъема происходит за счет давления жидкости, поступающей от насоса 8 в дополнительный гидроцилиндр 4. Гидроаккумулятор 18 низкого давления через распределитель 15 (позиция f), распределитель 16 управления (позиция q) подключен к поршневой и што- ковой полостям вспомогательного гид- роцилиндра 3, обеспечивая тем самым плавающее положение ползуна 28. При. этом вспомогательньш гидроцилиндр 2 заперт гидрозамком 20, что обеспечивает беспрепятственное перемещение ползуна 28 по опорному башмаку 26 в направлении перемещения экскаватора на величину шага. За время подъема экскаватора он переместится на величину, равную половине шага.
Опускание экскаватора с дальнейшим его перемещением на половину шага осуществляется следующим образом.
Рабочая жидкость от насоса 8 через распределитель 11 (позиция а), гидрозамок 19 поступает в штоковую полость Щ гидроцилиндра подъема 1, Из поршневой полости П по трубопроводу через распределитель 14 управления (позиция а) жидкость поступает в гидроаккумулятор 17 высокого давления. Гидроаккумулятор 18 низкого давления через распределители управления 15 (позиция ),, 16 (позиция р) подключен к поршневой и што- ковой полостям вспомогательного гидроцилиндра 2, обеспечивая плавающее положение ползуна 27, при этом вспомогательный гидроцилиндр 3 заперт гидрозамком 21. Таким образом, при опускании экскаватора двуплечий рычаг 29 поворачивается вокруг шарнира 31 по часовой стрелке, а рычаг 30 - против часовой стрелки, при этом ползун 27 перемещается по направлению движения экскаватора на величину шага, а экскаватор - еще на половину шага к моменту его опускания на грунт.
Дальше происходит подъем опорных башмаков 25 и 26 за. счет 1 родолжаю- щейся подачи жидкости от насоса 8 в штоковую полость Ш гидроцилиндра подъема.
Из поршневой полости П гидроцилиндра подъема рабочая жидкость поступает через распределитель 15
10
15
20
25
30
мещается в исходное положение опорный башмак 26. Рабочая жидкость от насоса 8 через обратный клапан 9, распределители управления 11 (позиция с), 12 (позиция п), 13 (позиция т), гидрозамок 21 поступает в штоковую п олость вспомогательного гидроцштиндра 3, перемещая опорньй башмак 26 в исходное положение. Из поршневой полости этого гидроцилиндра жидкость через гидрозамок 21, распределители управления 13 (позиция га), 14 (позиция с) идет на слив.
Таким образом, передача веса экскаватора на опорные башмаки при его перемещении посредством двуплечих рычагов позволяет при соответствующем подборе плеч этих рычагов осуществлять подъем и перемещение экскава тора не четьфьмя, а двумя гидроцилиндрами подъема, имеющими те же гео метрические параметры, что упрощает конструкцию, снижает стоимость ходового оборудования и энергозатраты на передвижение экскаватора.
Подключение гидроаккумуляторов низкого давления к поршневым и што- ковым полостям вспомогательных гидро цилиндров обеспечивает поочередно их плавающее и запертое положение.и, таким образом, перемещение экскавато ра при его подъеме и опускании работой гидроцилиндров подъема. Вспомогательные гидроцилиндры осуществляют
управления (позиция d) в гидроаккуму- лишь перемещение опорных башмаков в
лятор 18 низкого давления.
После подъема, опорных башмаков 25 и 26 на заданную высоту над грунтом происходит перемещение этих башмаков в исходное положение последовательно. Рабочая жидкость от насоса 8 через распределители управления 11 (позиция с), 12 (позиция т), гидрозамок 20 поступает в штоковую полост вспомогательного гидроцилиндра 2. Из поршневой полости этого гидроцилиндра жидкость через гидрозамок 20, распределители управления 12 (позиция т), 13 (позиция п), 14 (пози- .цйя с) идет на слив. Гидроцилиндр подъема 1 заперт гидрозамком 19, удерживая опорные башмаки 25 и 26 над поверхностью грунта. Затем пере0
5
0
5
0
мещается в исходное положение опорный башмак 26. Рабочая жидкость от насоса 8 через обратный клапан 9, распределители управления 11 (позиция с), 12 (позиция п), 13 (позиция т), гидрозамок 21 поступает в штоковую п олость вспомогательного гидроцштиндра 3, перемещая опорньй башмак 26 в исходное положение. Из поршневой полости этого гидроцилиндра жидкость через гидрозамок 21, распределители управления 13 (позиция га), 14 (позиция с) идет на слив.
Таким образом, передача веса экскаватора на опорные башмаки при его перемещении посредством двуплечих рычагов позволяет при соответствующем подборе плеч этих рычагов осуществлять подъем и перемещение экскаватора не четьфьмя, а двумя гидроцилиндрами подъема, имеющими те же геометрические параметры, что упрощает конструкцию, снижает стоимость ходового оборудования и энергозатраты на передвижение экскаватора.
Подключение гидроаккумуляторов низкого давления к поршневым и што- ковым полостям вспомогательных гидроцилиндров обеспечивает поочередно их плавающее и запертое положение.и, таким образом, перемещение экскаватора при его подъеме и опускании работой гидроцилиндров подъема. Вспомогательные гидроцилиндры осуществляют
исходное положение.
Формула изобретения
Механизм перемещения шагающего экскаватора по авт.св. № 1331970, отличающийся тем, что, с целью уменьшения энергоемкости перемещения экскаватора, механизм перемещения снабжен закрепленной- на платформе вертикальной направляющей, дополнительными башмаками и дополнительными двуплечими рычагами, причем последние связаны с основными двуплечими рычагами посредством оси, установленной в вертикальной направляющей и связанной со штоком гидроцииндра подъема башмаков.
1364671
А А
23 5
/
JS
25
ГХ
Фиг. 2
35
26
щигЛ
| Механизм перемещения шагающего экскаватора | 1986 |
|
SU1331970A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
