1
1 I
1
ll
I i, II
IH 1
illI
ii
I i
i;;; ipo.i Л ,Д ll-: (iiHf. 1; на
:;. V ,|ии . 5 na:ipe:i :; о;;;-, -i ;).i Ч1еч Л.-Д на
:чч;рКи -И: , ; .iikilbeFs
ь; р I чка. Ы1и: и;; cipa 1 v ii.i),- iliiьiv:i: iia.iHNiM 2 ,U1H i Ku.i i : B У.КЖ 4. MOxaiiH: iK,-, ; vi;: anii;rv;a Ь ;;();;.ачп ,i .laiKOh , ,L.:i;i полачи MlK П л.|Я :ai-i()iKH ii.iac . MCxaiiii : (i i:;)е;;ва)иin-ii i vK ai H;i:v;a :u.) i.rpC VlfiiiOiUiH IXilOfia 1 CO:.:чнлра 13, iiiapiiiipia) . i:e;r:p качаниу; которо;;. г; a : . ii i:) л V Ж И . : a: - .лл и ioaii a Jia iMlKv a ipi i i (;Л1 р ЖИПеч
л и 1 рп i upa i, .

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки дюбелей с шайбами | 1991 |
|
SU1794004A3 |
| Машина для сборки втулочных и роликовых цепей | 1976 |
|
SU632466A1 |
| Формовочный автомат карусельного типа | 1986 |
|
SU1400763A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПЛАСТИН И СБОРКИ СЕКЦИЙ РЕБРИСТЫХ РАДИАТОРОВ | 1997 |
|
RU2108215C1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
| Автомат для сборки игольчатых подшипников карданного типа | 1976 |
|
SU717422A1 |
| Автомат для установки упругих колец в наружные канавки базовых деталей | 1983 |
|
SU1114511A2 |
| Устройство для отделочной обработки наружных поверхностей тел вращения | 1988 |
|
SU1627384A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПЛАСТИН И СБОРКИ СЕКЦИЙ РЕБРИСТЫХ РАДИАТОРОВ | 1996 |
|
RU2100171C1 |
| Автомат для сборки деталей типа вал с дисками | 1988 |
|
SU1551511A2 |
1. АВТОМАТ ДЛЯ СБОРКИ ВНУТРЕННИХ ЗВЕНЬЕВ ПЛАСТИНЧАТО-РОЛИКОВОЙ ЦЕНИ, содержащий смонтированные на станине ме.ханизм транспортировки собирае.мых элементов в зону сборки с приводом его перемещения, узлы подачи собираемых элементов к механизму транспортировки и механизм напрессовки пластин в виде соосно расположенных запрессовочных эле.ментов со средства.ми центрирования, отличающийся тем, что. с целью повышения надежности и качества сборки путе.м исключения заклинивания собираемых элементов при подаче в зону сборки, механизм транспортировки собираемых элементов выполнен в виде вертикального ротора с равно.мерно расположенными на цилиндрической поверхности пазами, расстояние между которыми равно шагу пени, для размещения втулок и роликов, и выемками для установки п,тастин, размещенны.ми по обе стороны от пазов, привод перемещения ротора выпо, Б виде силово1о гидрощминдра, шток которого niapiinpHo связан с осью вращения ротора посредством рычага, и подпружиненной серыи, шарнирно связанной одним концом со штоком гидроцилиндра и установленной с возможностью взaи ioдействия другим концом с .И ротора, а также подпружиненного фиксатора, раз.мещенного в ротора, а механизм напрессовки выполнен в виде узла иредварительрюй напрессовкн и узла допрсссовки. с ;сщенных один относите.тьно дру1Ч)го на нечет(О ное число шагов ротора. 2.Авто.мат по п. 1. отличающийся тем, (Л что механизм нодачи вьшолнен в виде наклонного )чатого .ютка. на конце которого установ.ен заталкиватель в Biiде силового гидроци,1индра с но, штоком для размещения в нем лотка, при это на конце штока смонтирован шариковый замок для захвата вту.юк. 3.Автомат по п. . отличающийся тем, что он снабжен подпружиненным фиксатосо ром роликов в пазах ротора, установ,тенным ND на станине. СО 
i i ; : i П
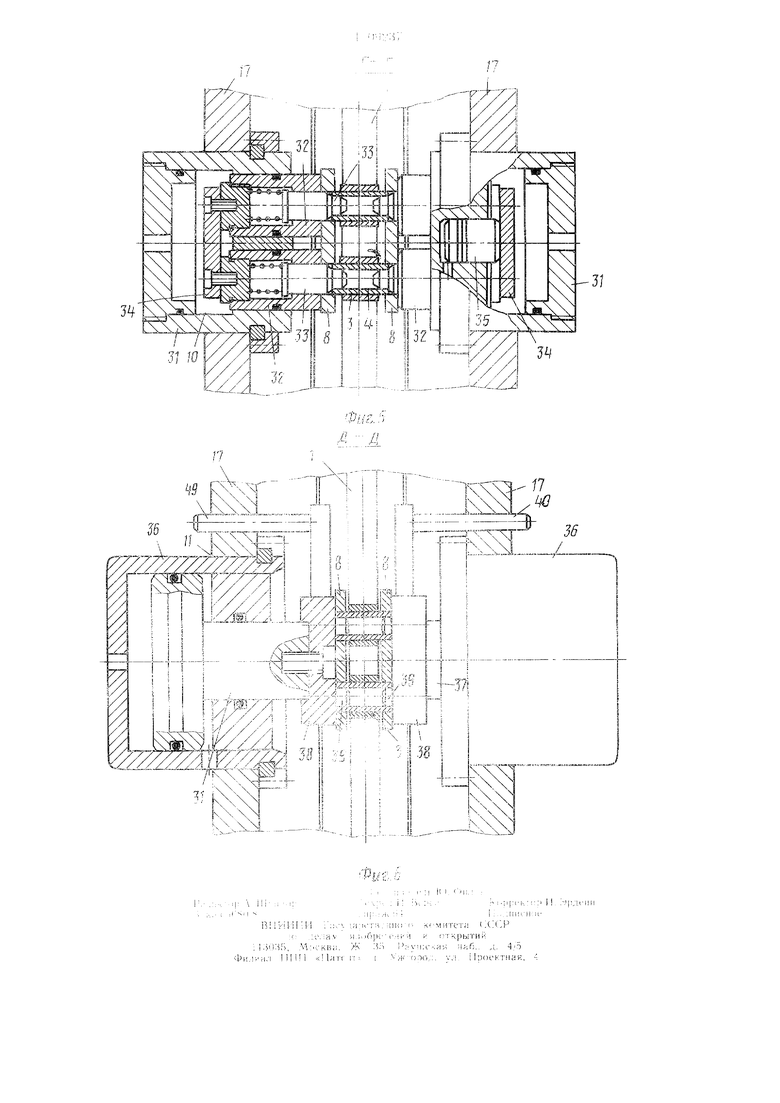
стоянием, )авпым iuarv цепи. На концах плунжеров установлены нод пру ж и не иные фиксаторы центраторы .33, обеспечивающие точную взаимную ориентацию нластш 8 и втулок 4 но отверетиям njii; нанрессовке. Плунжеры 32 д.тя обеспечения о;1,новременного переме1нения соединены собой обш,ен нланкой 34 Под углом 90° к рабочим плунжерам 32, параллельно им, установлены возвратные н; унжерь( 35, взаимодействуюш,ие с планкой 34.
Механизм I 1 для допрессовкн включает два оппознтно раеноложенпых соосных гидроцилнндра 36, на HJTOKax 37 которых закрен;1епы плоение пуансоны 38, снабженные центрирующими rrry-iKi: пальцами 39. Центг)пруюн1ие наль.чы 39 предотвраа1ают перекос внутреннего звена H|iii д(Л рессовке. Соединенный с нуанс(хном контршток 40 нрепятетвует повороту пуансона 38 относительно оси Н1тока 37.
Автомат работает следуюн ч.м образом.
В исходном Г10.1-.;;женин ротор i оста.новлен 3 рабочей позиции и заетопорс (рикеатором 15, нр.и этом П1ТОК 1идроцилиндра 13 Г1рнвода 12 пере.мен1.ения втянут. Поворот ротора на оди таг осуществляется пг;н рабочем ходе :ндронилин.тра К;, которр)|й через 1однружиненнук) серьгу 15 взан.модействует с соотвеатвующим назо: 2 рото)а 1. 11од |ружи |еннь й (}зиксатор 1 о выходит из зацеп.1ения, отк.топяетс.ч i;o :.(бьям ротора 1 и входит в следующий чаз 2 з конце хода, обеспечивая точное позициопирование ротора и нредотврантая его обоатгое движение нр1 ;пЯГ1:ван;:;: штока гядроцилиндра 1.3.
Одповре.1ещ;о ripi; л)рат}Ц}м xo/.U подвижная серы а 15 1и)звран1ается Р исходlioe ноло/кение, зане:1л; ись в конце хода с очередным пазом 2.
Процесс сборки ьнуг|)ен;:ег;:) звена .азбит на следую ннс операции: ; -установка полнка 3 з паз 2 рото)1 1; li позициясборка 1г:ллк 1 4 р(. пками ii иоз.нщи vciaHOBKa нла::тин 8 в боковые В1 1емки 9 ротора 1; нозиция -- п)е.чварительная напрессг;вка гластнн 8 па втулки 4; V нозицня -- :;оП|)есс(;зка пласт :;; 8; У1 нозчцпясброс го-;С)В(Л1 нрол.;. кцин. Вес н:)оцесс 51 нь:;;о.М1Я1отСл в :.оиент остановки ротора i.
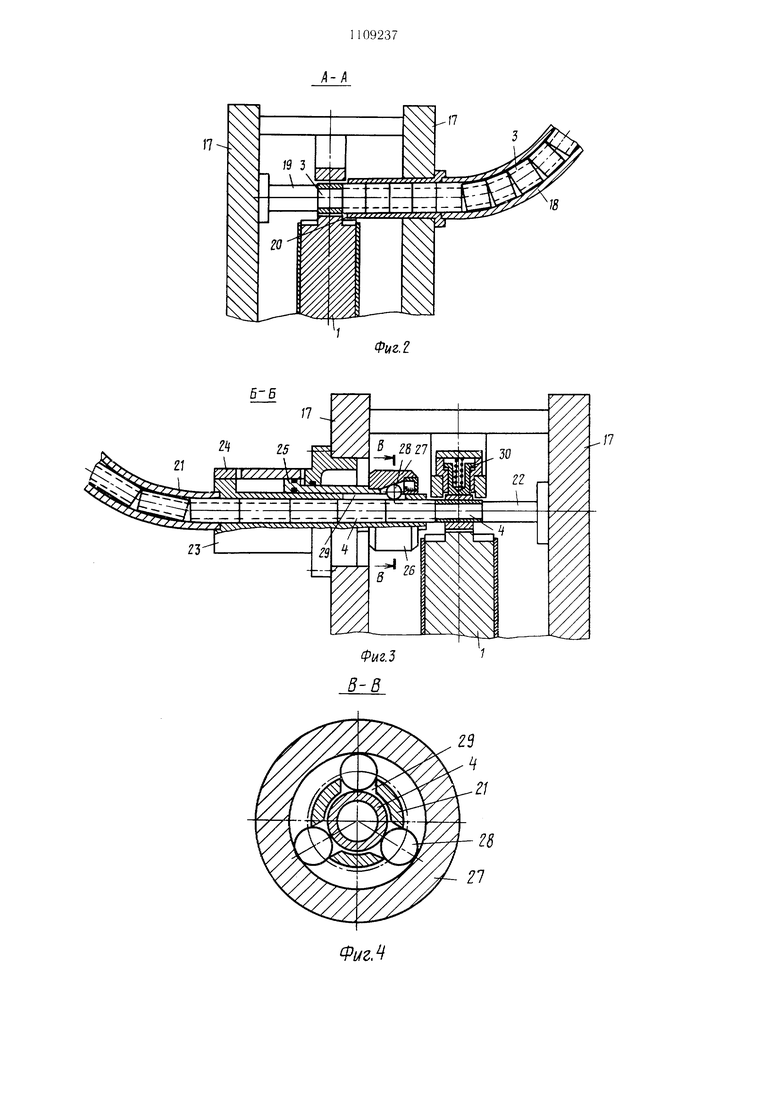
И 1-н нознции io/nii i 3 ;1од собствеппь;М весом пс;Дак)|-ся из щ-ггатели в ориентированном Ю;()же1;ии B;;0.;ii, своей оси но изогн томс .1отк 18 до не::одБИЖ1 С1о -пора
19, при этом ро.лик 3 захо.и
3 2 ротора 1. Во время поворота ротора 1 ролики 3 в логкс 18 отсекаются i г;г)сле
ста НОВК1;
2 совпаротс;ра. ког.да ось очередного паз
ьггка 18, даст с осью В 1ходнО Ч) 20 е.1едук) ро. ;ик 3 ; одает(;я в эт(;т паз.
Во II-и (юзпцпн В1. 1КИ ) иод собственН1; м аесол: подаются из ннтате;1Я в ориентп;)ованном 11оложе)Ц1н вдоль своей оен но паклонЮ.му трубчат( лотку 21 до 11сподВИЖНО1Ч) утора 22, нг).и этом вту.жа 4 входиг в отверстие ролика 3, ксугорый в этот MOMcirr поджат к пазу 2 иоднрхжинснны.м фикеатором 30. Одновременно шток 25 гндроцилиндра 24 соверн ает рабочий; ход. н|1п этом конуе 27 через три шарика 28 зак.тинн вает втулку 4 и еоздаетея дополнительное усилие для заталкивания втулки 4 в ро.тнк 3. При обратном ходе шарики 28 раск.тиниваются и не нренятетвуют свобо;1. прохождению вту.ток но лотку 21. Во время поворота ротора I втулки 4 отсскак тся и после остановки ротора 1, когда ось очередного ролика 3, находящегося в этот NUJMCIIT
в пазу 2, совпадает с ocixo .тотка 21. с.кутхьУ ндая Ул.тка задвигается в этот ро.пк.
В 1П-Й позиции п.тастинь; 8 по тзчм парал.;е.1;1ным лотка.м 7 нодаь тся нод собственным вееом из ,1Я в орие ггировапно.; и(Х1()жсн1-:н в вептика.тьной ;.оскости
HUix ф|;ксапи1о 1Г;астнн на роторе 1. В процессе поворота пластины отсекаются нар Ж1-;о1{ цг:,1ппдрической повепх1и)стыс1 ротора 1 п затем елет-ющие Д1К пастппы 11она.1.;пот noc.ie nci-UjpoTa на два 1нага в очередные б.око..ыс выемки 9.
В 1У-Й no3i;;ui : рабочие i;. .:2 обоих 1-пдроци.;пп.и)ов 31 сове|Унают хо.т навстреч} . iipii эт.р, подд жиненн1 е (Ьиксатор) - ;е ;траторы ,53 заходят Bnaca.ie в (Увеостня n.iacTHii 8 is вт.к;| 4. ;1бес1:ечивая гоч;; :о о)пснтацпк) дста.1сй ;о О: iicpcTi;H огпоспте.твно друг . а зат;/л: п.1;,пжеры 32 нанреесовывают H/KICTHi.bi па с псбольн им усилнем. ()б)аГ1н, хо.а сонерп1ается под действием iiapiii возвоаН:;У п, 35.
В ПОЗПНП ПрОИ iBO.in гея ОКО|1Ч::1У.1Ьпгя ;:o;ipccco3K;; п.:;:С ::н с максима.1ЬПi„ : ус:;.:::ем. iliTOKi; 3 гпдроцнлиндров 3(5 совер:п;:ч)- ) ход riaiiCTpe4 дру;л-, MjH: i;4); ncHT)iip}ioHine на.и.щл 39 захсмя Б o BcpCTJiH вту,1о,ч 4, а июекне ; aiieoin ; 38 ,д5оеп плоскостью Д(v:pe. :.укти ibi 8 ;ii) yiio.pa в TOJHU I вту.юк 4. ii i этом сборка BHyipCHHcro звена заканчиваете :.
еове(нпаютея через каждв е два шага поворота ротора 1. Поеко. уетрснгетва т.тя нанрсссовкп 10 п донреесовки 1 1 с ;ен1ен-: на нечетное число n;ai(B, эти oiiepaiuin ос цгествлнются поочередно через одни Hiai.
В л 1-й нозини собранное i nvjiic: ;. звспо по11адает па .;от1Д -отбой;1П)ч . )торый О1клопяет п сбраеывает изделие с ротлоа 1.
Система аБТоМс1Тикн обеспечпваег ССУ гласоваппое движение всех четройсгв автомата, ко;ггро.1П|Пет na/innne дета.1ей п Ho.iiicnne oHe-niiuiii. Предласаемыг ;1втом;гг IKJ с и;в1км И1о с базовым обт ектом, :ui к(Г1-())ый iiniMiiii ipecc кривошипный К213(). 1К)();1яет :i(iHi iсить произволите.лыюст,, ивгоматлзирона м. niinneci; сб())ки, повысить качество сборки н ..а L-MCT ;1ОВп1сить лол1ов(чи(к-ть иеlU-iL
17Фиг,
