Изобретение относится к машиностроению, в частности к станкостроению, -и преднаэначено для транспортирования крупных заготовок от накопителя вдоль оси автоматической линии к зонам обработки и установки их в приспособление по базирующим элементам.
Известен автооператор, содержащий основание, схват, размещенньй на раме, привод схвата с винтом и ynpyrim элементом СП.
Недостатком известного автооператора является низкая надежность, связанная с отсутствием надежной цен ровки схвата.
Цель изобретения - повышение надежности.
Цель достигается тем, что автооператор, содержащий основание, схват, размещенный на раме,, привод схвата с винтом и упругим элементом , снабжен призмой и вилкой, связанной с винтом и подпружиненной относительн.о рамы упругим элементом, а призма закреплена на раме, с возможностью взаимодейстеия с вилкой.
На фиг. 1 изображено устройство в .момент установки на станок, общий вид, на фиг.2 - то же, в момент захвата заготовки в накопителе.
Автооператор содержит тележку 1, перемещающуюся по основанию. На тележке 1 с помощью скалок 2 закреплена рама 3, перемещающаяся вертикально (привод перемещения не показан). На раме 3 размещаются каретки 4 и 5 схвата с захватными губками. На одной из кареток закреплен привод 6 винта 7, с помощью которого перемещаются каретки 4 и 5. Винт 7 имеет правую и левую резьбу, и на нем располагается вилка 8 с упругим элементом, в который входят две пружины 9, размещенные на стержне 10, закрепленном на раме 3. На вилке 8 расположен шип 11, а на раме 3 закреплена призма 12 соосно шипу 11 Заготовка 13 (фиг.1) устанавливается на установочный элемент 14 в приспособлении 15 ипи находится в накопителе 16 (фиг.2).
Устройство работает следующим образом.
Тележка 1 движется по основанию к накопителю 16. Достигнув заготовки 13, останавливается. Рама 3 опускается по скалкам 2 с помощью привода
(не показан) на высоту, обеспечивающую захват заготовки 13 механизмами схвата. Каретки 4 и 5, разведенные в начальном положении на размер, обеспечивающий захват заготовки 13, начинают сближаться по винту 7, приводимому во вращение приводом 6. При этом привод 6, закрепленный на одной из кареток, перемещается вместе с ней по шлицевому концу винта 7, благодаря которому возможно одновременное осуществление передачи вращательного движения винту 7 и поступательного движения самого привода 6.
В случае смещения оси заготовки 13 относительно оси автооператора одна из кареток достигает заготовки раньше, чем другая. Полный захват заготоки происходит за счет осевого перемещения винта 7 и вилки 8 и сжатия О;чной из пружин 9 В зависимости от того, в какую сторону от оси автооператора смещена ось заготовки. Причем захват осуществляется по оси заготовки 13. При подъеме рамы 3 с заготовкой 13 вверх происходит выведение заготовки и кареток 4 и 5 на ось автооператора с помощью шипа 1 и лризмы 12. Шип 11 входит в призм 12 и происходит фиксирование заготовки, т.е. исключается возможность бокового перемещения кареток и заготов.ки при дальнейшей транспортировке.
В момент установки заготовки 13 в приспособление 15 станка рама 3 с каретками 4 и 5 и заготовкой Опускается вниз и последняя базируется на установочные элементы 14 в приспособлении 15. При этом в случае смещения оси симметрии установочных элементов 1 относительно оси симметрии автооператора происходит переориентация кареток с заготовкой относительно оси установочных элементов 14 за счет осевого перемещения винта 7 с помощью упругого элемента, чем достигается точность установки заготовки в приспособление. В случае, когда конструкция заготов.ок не позволяет базировать их на установочные элементы 14, точность ориентации заготовки в приспособлении достигается с помощью шипа 11, расположенного на вилке 8, и призмы, аналогичной призме 12, установленной в самом приспособлении на соответствующем уровне не показана
Конструкция устройства проста и надежна в работе, особенно в автоматических линиях для обработки крупных заготовок с большой протяженностью
транспортных путей, так как не требует высокой точности при установке транспортной системы параллельно линии станков.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1984 |
|
SU1202800A2 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| Установка для сборки и сварки труб с резьбовыми хвостовиками | 1987 |
|
SU1433726A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| СПОСОБ МНОГОЯРУСНОГО КОМПОНОВАНИЯ И ПЕРЕКОМПОНОВАНИЯ РАБОЧЕЙ ПОЗИЦИИ АВТОМАТИЧЕСКОЙ ЛИНИИ И ПЕРЕКОМПОНУЕМАЯ РАБОЧАЯ ПОЗИЦИЯ АВТОМАТИЧЕСКОЙ ЛИНИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2011 |
|
RU2487004C2 |
| Автооператор | 1969 |
|
SU344701A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Автооператор | 1979 |
|
SU831516A1 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
| Устройство для сборки роликов | 1981 |
|
SU1054007A1 |
АВТООПЕРАТОР, содержащий основание, схват, размещенный на раме, привод схвата с винтом и упругим элементом,, отличающийся тем, что, с целью повышения надежности в работе, он снабжен призмой и подпружиненной относительно рамы вилкой, при этом призма закреплена на раме с возможностью взаимодействия с вилкой. i 4;) ел 00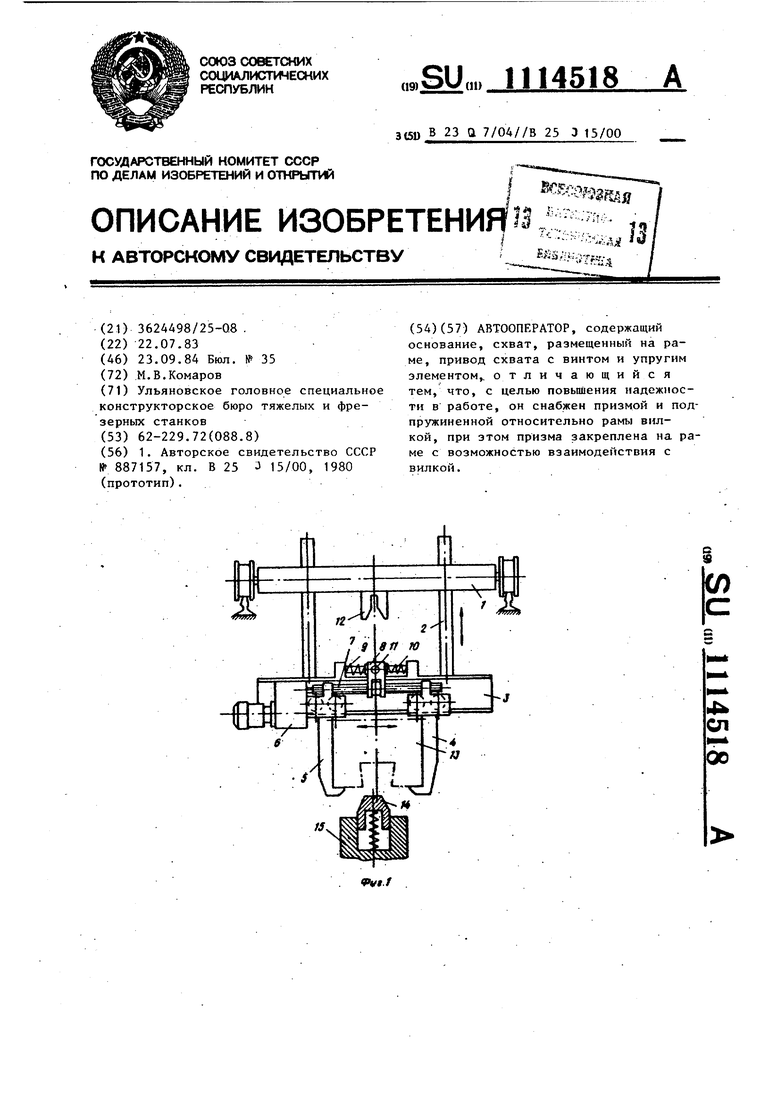
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
