ел
со ю
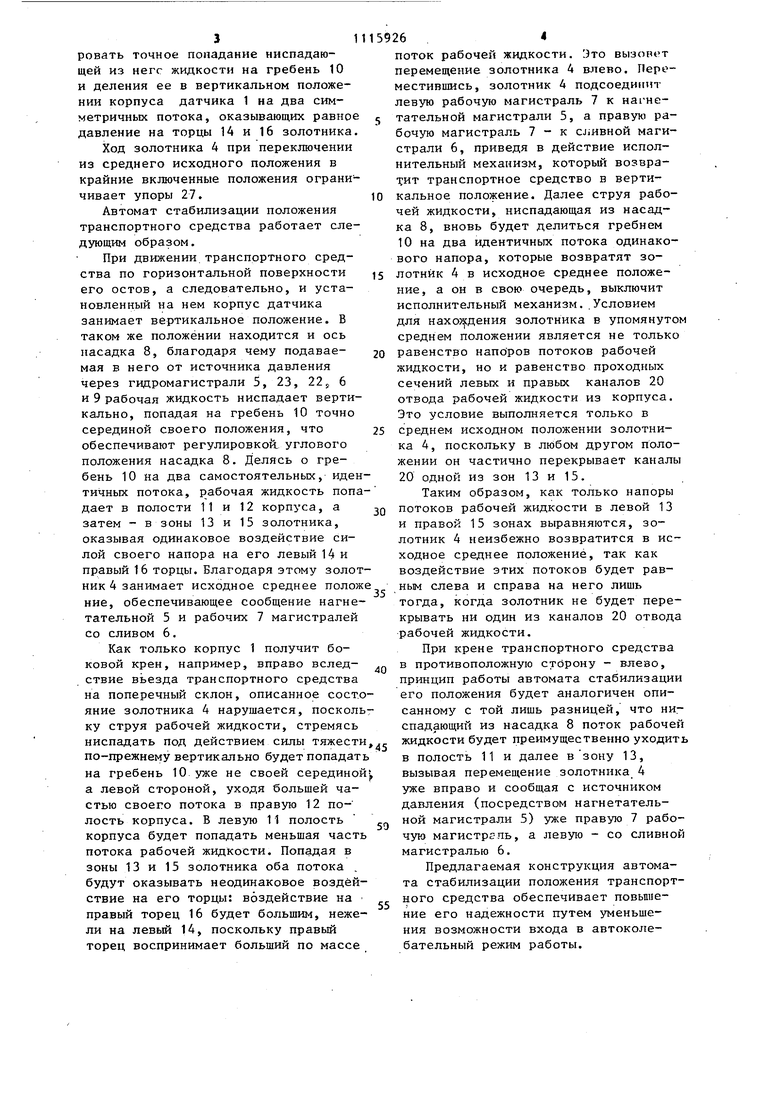
ot Изобретение относится к устройст вам для стабилизации крутосклонных транспортных средств и, в частности к автоматам стабилизации положения этих транспортных средств. Наиболее близким по технической сугцности и достигаемому результату к предлагаемому является автомат стабилизации положения транспортного средства, содержащий маятниковый датчик крена, управляющий золотниковым распределителем, связанным на нетательной магистралью с источнико давления, сливной магистралью - с резервуаром и рабочими магистралями с силовыми цилиндрами исполнительного механизма системы стабилизации транспортного средства ll. Недостатком этого автомата является невысокая надежность его работы благодаря возможности входа его в автоколебательный режим работ Цель изобретения - повышение надежности автомата путем уменьшения возможности входа его в колебательный режим работы. Указанная цель достигается тем, что в автомате стабилизации положения транспортного средства, содержа щем маятниковый датчик крена,, управляющий золотниковым распределителем, связанным нагнетателыйэй магистралью с источником давления, сливной магистралью - с резервуаром рабочими магистралями - с силовыми цилиндрами исполнительного механизма системы стабилизации транспортно средства, маятниковый датчик выполнен полым, а указанньй распределитель размещен в нижней части полости датчика, на оси вращения которого смонтирован насадок для пода чи жидкости перпендикулярно золотни ку распределителя, который вьтолнен с обращенным к насадку гребнем, раз деляющим нижнюю часть полости на си метричные относительно вертикальн плоскости камеры, сообщенные с зонами полости, примыкающими к торцам золотника.. На фиг. 1 изображен автомат стабилизации положения транспортного средства, разрез; на фиг. 2 - разре А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1. Автомат стабилизации положения транспортного средства содержит ма262ятниковый чатчик крена 1, образующий замкнутую полость 2. В нижней части этой полости размещен гидравлический распределитель 3 с золотником 4, управляемым эти датчиком. Распределитель 3 снабжен нагнетательной магистралью 5 для сообщения с источником давления рабочей жидкости, сливной магистралью 6 и двумя рабочими магистралями 7 для подвода рабочей жидкости к силовым цилиндрам исполнительного механизйа системы стабилизации . Управление золотником 4 выполняется давлением потока рабочей жидкости, ниспадающего -через расположенный в верхней части полости 2 корпуса 1 насадок 8. Для этого сливная магистраль 6 распределителя сообщена трубопроводом 9 с расположенным над ним и обращенным в его сторону перпендикулярно оси золотника 4 упомянутым насадком 8, а образуемая охватывающим насадок и распределитель корпусом 1 полость 2 разделена гребнем 10 в нижней части на две - левую 11 и правую 12 камеры, симметричные относительно вертикальной плоскости, проходящей через ось насадка 8 перпендикулярно оси золотника 4. Левая камера 11 корпуса сообщена с зоной 13, примыкающей к левому торцу 14 золотника, .а правая 12 камера корпуса сообщена с зоной 15, примыкающей к правому торцу 16 золотника плавными переходами 17 и 18. Для сообщения нагнетательной магистрали 5 со сливной 6 в момент чрезмерного повышения -давления рабочей жидкости служит перепускной клапан 19. Для отвода рабочей жидкости из то1 цовых зон 13 и 15 служат каналы 20 и сообщающие их кольцевые полости 21. Для сообщения со сливной магистралью 6 нагнетательной магистрали 5 и рабочих магистралей 7 в золотнике 4 выполнено соосное его оси отверстие 22, сообщающееся радиальными каналами 23 с перекрываемыми золотником кольцевыми выточками 24 рабочих магистралей и 25 сливной магистрали. Насадок; 8 установлен в корпусе датчика 1 с возможностью поворота в вертикальной плоскости, проходящей через ось золотника 4. Для фиксации его Б определенных положениях предназначен стопорный винт 26. Поворотное крепление насадка позволяет регулировать точное попадание ниспадающей из неге жидкости на гребень 10 и деления ее в вертикальном положении корпуса датчика 1 на два симметричных потока, оказывающих равное давление на торцы 14 и 16 золотника Ход золотника 4 при переключении из среднего исходного положения в крайние включенные положения ограничивает упоры 27. Автомат стабилизации положения транспортного средства работает следующим образом. При движении.транспортного средства по горизонтальной поверхности его остов, а следовательно, и установленный на нем корпус датчика занимает вертикальное положение. В таком же положении находится и ось насадка 8, благодаря чему подаваемая в него от источника давления через гидромагистрали 5, 23, 22;, 6 и 9 рабочая жидкость ниспадает вертикально, попадая на гребень 10 точно серединой своего положения, что обеспечивают регулировкой, углового положения насадка 8. Делясь о гребень 10 на два самостоятельных, иден тичных потока, рабочая жидкость попа дает в полости 11 и 12 корпуса, а затем - в зоны 13 и 15 золотника, оказывая одинаковое воздействие силой своего напора на его левый 14 и правый 16 торцы. Благодаря этому золот ник 4 занимает исходное среднее полож ние, обеспечивающее сообщение нагне тательной 5 и рабочих 7 магистралей со сливом 6. Как только корпус 1 получит боковой крен, например, вправо вследствие въезда транспортного средства на поперечный склон, описанное сост яние золотника 4 нарушается, поскол ку струя рабочей жидкости, стремясь ниспадать под действием силы тяжест по-прежнему вертикально будет попадат на гребень 10 уже не своей середино а левой стороной, уходя большей частью своего потока в правую 12 полость корпуса. В левую 11 полость корпуса будет попадать меньшая част потока рабочей жидкости. Попадая в зоны 13 и 15 золотника оба потока будут оказывать неодинаковое воздей ствие на его торцы: воздействие на правый торец 16 будет большим, неже ли на левый 14, поскольку правый торец воспринимает больший по массе ПОТОК рабочей жидкости. Это вызоЕИт перемещение золотника 4 влево. Переместившись, золотник 4 подсоединит левую рабочую магистраль 7 к HaiHcтательной магистрали 5, а правукт рабочую магистраль 7 - к са;ивной магистрали 6, приведя в действие исполнительный механизм, который возвра5ИТ транспортное средство в вертикальное положение. Далее струя рабочей жидкости, ниспадающая из насадка 8, вновь будет делиться гребнем 10 на два идентичных потока одинакового напора, которые возвратят золотник 4 в исходное среднее положение , а он в свою очередь, выключит исполнительный механизм..Условием для нахо5 дения золотника в упомянутом среднем положении является не только равенство напоров потоков рабочей жидкости, но и равенство проходных сечений левых и правых каналов 20 отвода рабочей жидкости из корпуса. Это условие выполняется только в среднем исходном положении золотника 4, поскольку в любом другом положении он частично перекрывает каналы 20 одной из зон 13 и 15. Таким образом, как только напоры потоков рабочей жидкости в левой 13 и правой 15 зонах выравняются, золотник 4 неизбежно возвратится в исходное среднее положение, так как воздействие этих потоков будет равным слева и справа на него лишь тогда, когда золотник не будет перекрывать ни один из каналов 20 отвода рабочей жидкости. При крене транспортного средства в противоположную сторону - влево, принцип работы автомата стабилизации его положения будет аналогичен описанному с той лишь разницей, что ниспадающий из насадка 8 поток рабочей жидкости будет преимущественно уходить в полость 11 и далее взону 13, вызывая перемещение золотника 4 уже вправо и сообщая с источником давления (посредством нагнетательной магистрали 5) уже правую 7 рабочую магистргпь, а левую - со сливной магистралью 6. Предлагаемая конструкция автомата стабилизации положения транспортного средства обеспечивает повьпиение его надежности путем уменьшения возможности входа в автоколебательный режим работы.
Б-S
(pui.3
ffff
фиг.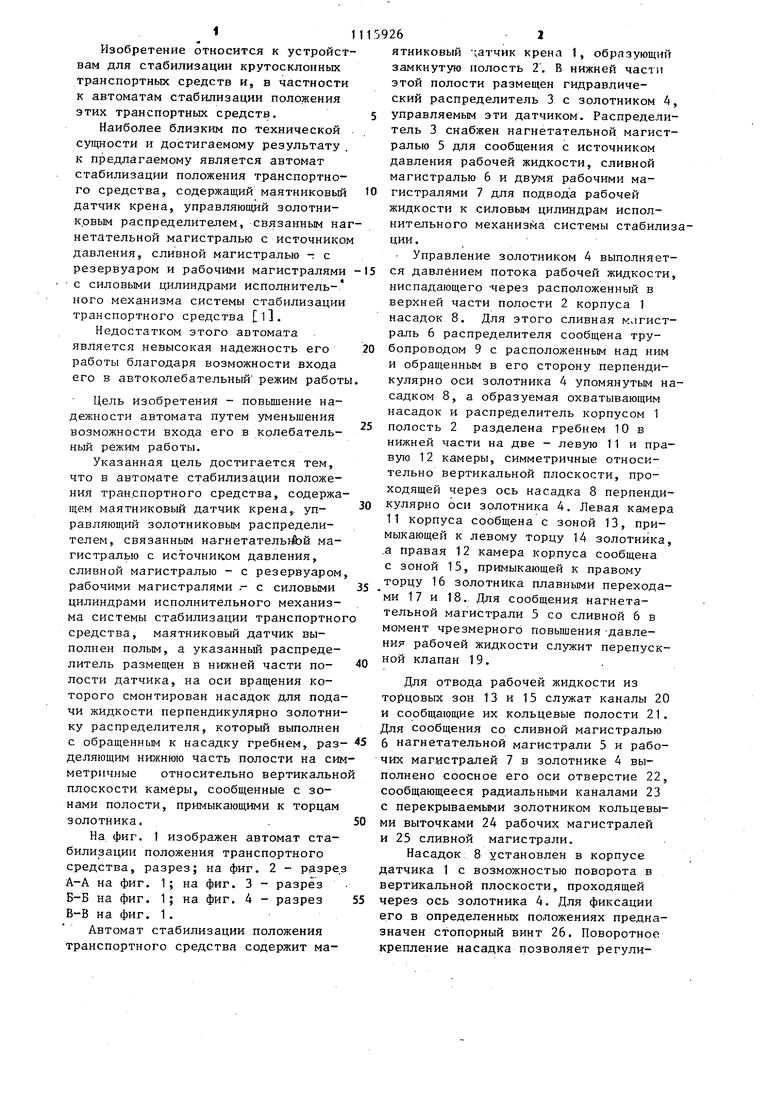
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Тракторная тележка для транспортировки грузов по склонам | 1983 |
|
SU1156928A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Система автоматической стабилизации положения остова крутосклонного транспортного средства | 1988 |
|
SU1521616A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Система стабилизации крутосклонного транспортного средства | 1987 |
|
SU1498640A1 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Маятниковый датчик крена крутосклонного транспортного средства | 1979 |
|
SU870206A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |

АВТОМАТ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащий маятниковый датчик крена, управляющий золотниковым распределителем, связанным нагнетательной магистралью с источником давления, сливной магистралью - с резервуаром, рабочими магистралями - с силовыми цилиндрами исполнительного механизма системы стабилизации транспортного средства, отличающийся тем, что, с целью повышения надежности путем уменьшения возможности входа в автоколебательный режим работы, маятниковый датчик выполнен полым, a указанный распределитель размещен в нижней части полости датчика, на оси вращения которого смонтирован насадок для подачи жидкости перпендикулярно золотнику распределителя, который выполнен с обра1(енным к насадку гребнем, разделяющим нижнюю часть полости на симметричные относительно вертикальной плоскости (Л камеры, сообщенные с зонами полости, с примыкающими к торцам золотника.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Маятниковый стабилизатор крутосклонного трактора | 1977 |
|
SU742175A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
