Изобретение относится к обработке металлов давлением, преимущественно к устройствам для подачи заготовок в рабочую зону обрабатывающей мащины, например пресса, и может быть использовано при автоматизации процессов щтамповки в различных отраслях машиностроения.
Цель изобретения - упрощение конструкции и расширение технологических возможностей путем повышения маневренности.
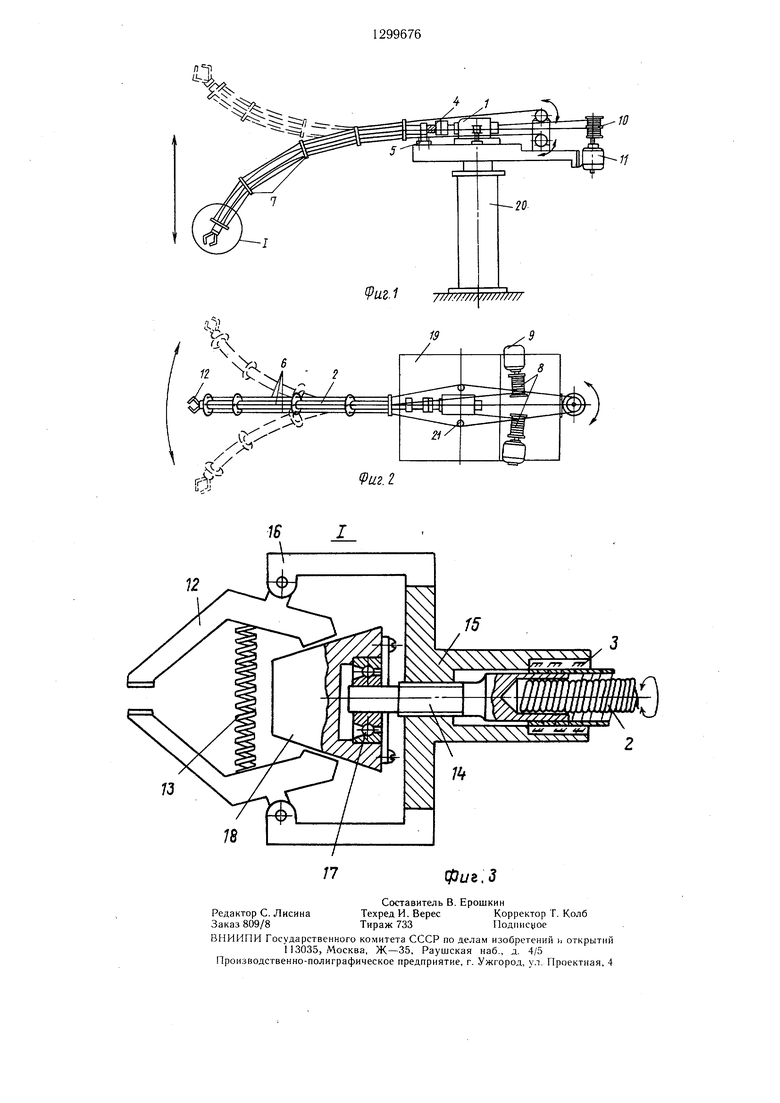
На фиг. 1 схематически изображен про- 10 мышленный робот, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел I на фиг. 1.
Промышленный робот содержит привод (электромеханический модуль-реверсивный двигатель с встроенным редуктором) 1, свя- 15 занный с мех-анической рукой, выполненной в виде гибкого, например, проволочного вала 2, размешенного в броне (гибком ме- таллорукаве) 3 посредством муфты 4. Один конец гибкого вала 2 опирается на стойку-кронштейн 5, механическая рука поддерживается тросами 6 (например четырьмя) пропущенными через отверстия фланцев 7, насаженных на броню 3 гибкого вала 2. Одни концы тросов 6 закреплены в крайнем фланце 7, а другие концы намотаны на барабаны 8 с приводами 9 (например, реверсивными электродвигателями с встроенными редукторами) и барабан 10 с аналогичным приводом 11.
Захватный орган механической руки вы20
25
Перемещение механической руки в горизонтальной плоскости осуществляется другими тросами 6, наматываемыми на барабаны 8 с приводами 9. Смыкание и размыкание захватного органа производится в следующей последовательности. При правом вращении от двигателя 1 гибкого вала 2 вращается винт 1.4 и гайка 15 перемещается вправо, при этом концы двуплечих рычагов 12, контактирующие с копиром 18, поднимаются, а их свободные концы смыкаются и производят захват заготовки. Далее производится поворот платформы 19 на колонне 20 и передача заготовки в рабочую зону.
Затем производят реверс двигателя 1, гибкий вал вращается в левом направлении, гайка 15 идет по винту 14 влево и за счет пружины 13 происходит размыкание двуплечих рычагов 12, при этом заготовка освобождается. Затем происходит обратный поворот платформы 19, и цикл повторяется.
Предлагаемый промышленный робот конструктивно прост и характеризуется широкими технологическими возможностями за счет высокой маневренности. Он может быть применен также во взрывоопасных зонах и труднодоступных местах.
Формула изобретения
1. Промышленный робот, содержащий смонтированную на станине поворотную
полнен в виде двуплечих рычагов 12, под-зо форму, несущую механическую руку, выпол- пружиненных один относительно другого пружиной 13 растяжения и связанных с гибким валом 2 посредством винтовой пары, состоящей из винта 14, жестко связанного с гибким валом 2, и гайки 15 с фланцем в виде рычагов 16, шарнирно связанных с двуплечими рычагами 12 захватного органа. Другой конец винта 14 установлен в радиально-упорном подщипнике 17,- наружная обойма которого запрессована в гнезде конусного копира 18.
35
ненную в виде гибкого металлорукава с захватным органом и его приводом, систему управления, привод изменения пространственного положения механической руки с тросами, отличающийся тем, что, с целью упрощения конструкции и расширения технологических возможностей за счет повышения маневренности, захватный орган выполнен в виде подпружиненных один относительно другого двуплечих рычагов и кинематически связан с приводом посредством гибкого
Механическая рука с приводами смон- 40 размеш.енного внутри гибкого металтирована на поворотной платформе 19, си- дяшей на колонне 20 (станине). Для натяжения тросов 6 предусмотрены натяжные ролики 21. Управление приводами промышленного робота осуществляется системой управления по программам, применяемым в 45 промышленных роботах.
лорукава и связанного одним концо.м с приводом, винтовой пары, винт которой связан с другим концом гибкого вала, а гайка выполнена с фланцем в виде рычагов, каждый из которых шарнирно связан с одним из двуплечих рычагов в его средней части, конусного копира, размещенного внутри фланца и смонтированного на винте с возможностью взаимодействия своей боковой поверхностью с концами двуплечих рычагов.
лорукава и связанного одним концо.м с приводом, винтовой пары, винт которой связан с другим концом гибкого вала, а гайка выполнена с фланцем в виде рычагов, каждый из которых шарнирно связан с одним из двуплечих рычагов в его средней части, конусного копира, размещенного внутри фланца и смонтированного на винте с возможностью взаимодействия своей боковой поверхностью с концами двуплечих рычагов.
2. Робот по п. 1, отличающийся тем.
Работа промышленного робота осушест- вляется следующим образом.
Вертикальное перемещение механической руки с захватным органом осуществляется 50 ™ привод изменения пространственного намоткой тросов 6 на барабан с приво- положения механической руки снабжен до- дом П. На барабане 10 предусмотрены канавки с правым и левым направлениями.
полнительными тросами и барабанами для намотки соответствующих тросов
Перемещение механической руки в горизонтальной плоскости осуществляется другими тросами 6, наматываемыми на барабаны 8 с приводами 9. Смыкание и размыкание захватного органа производится в следующей последовательности. При правом вращении от двигателя 1 гибкого вала 2 вращается винт 1.4 и гайка 15 перемещается вправо, при этом концы двуплечих рычагов 12, контактирующие с копиром 18, поднимаются, а их свободные концы смыкаются и производят захват заготовки. Далее производится поворот платформы 19 на колонне 20 и передача заготовки в рабочую зону.
Затем производят реверс двигателя 1, гибкий вал вращается в левом направлении, гайка 15 идет по винту 14 влево и за счет пружины 13 происходит размыкание двуплечих рычагов 12, при этом заготовка освобождается. Затем происходит обратный поворот платформы 19, и цикл повторяется.
Предлагаемый промышленный робот конструктивно прост и характеризуется широкими технологическими возможностями за счет высокой маневренности. Он может быть применен также во взрывоопасных зонах и труднодоступных местах.
Формула изобретения
1. Промышленный робот, содержащий смонтированную на станине поворотную г латформу, несущую механическую руку, выпол-
форму, несущую механическую руку, выпол-
ненную в виде гибкого металлорукава с захватным органом и его приводом, систему управления, привод изменения пространственного положения механической руки с тросами, отличающийся тем, что, с целью упрощения конструкции и расширения технологических возможностей за счет повышения маневренности, захватный орган выполнен в виде подпружиненных один относительно другого двуплечих рычагов и кинематически связан с приводом посредством гибкого
размеш.енного внутри гибкого металлорукава и связанного одним концо.м с приводом, винтовой пары, винт которой связан с другим концом гибкого вала, а гайка выполнена с фланцем в виде рычагов, каждый из которых шарнирно связан с одним из двуплечих рычагов в его средней части, конусного копира, размещенного внутри фланца и смонтированного на винте с возможностью взаимодействия своей боковой поверхностью с концами двуплечих рычагов.
2. Робот по п. 1, отличающийся тем.
™ привод изменения пространственного положения механической руки снабжен до-
™ привод изменения пространственного положения механической руки снабжен до-
полнительными тросами и барабанами для намотки соответствующих тросов
W
(Ри2.г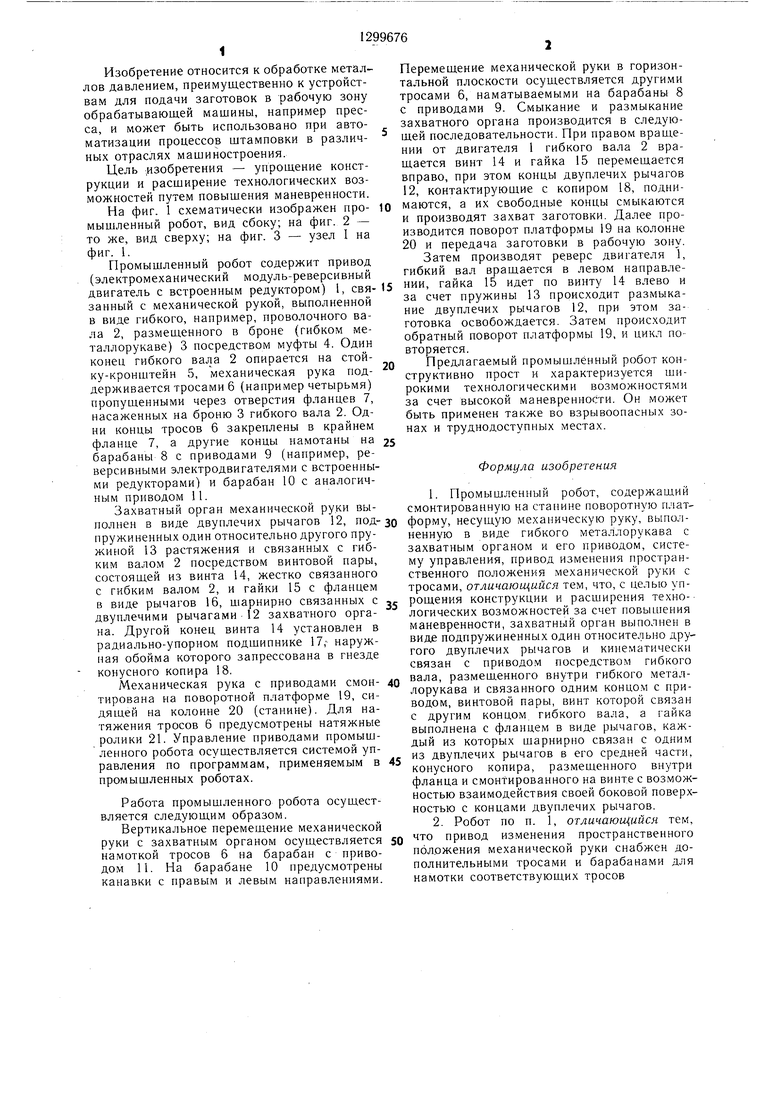
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поворота исполнительного органа промышленного робота | 1983 |
|
SU1189551A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Промышленный робот | 1984 |
|
SU1301528A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2558023C9 |
| Механизм позиционирования робота | 1983 |
|
SU1123774A1 |
| Робот к листоштамповочному прессу | 1980 |
|
SU880580A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
Изобретение относится к области обработки металлов давлением, преимунхествен- но к устройствам для подачи заготовок в рабочую зону оораоаты1 аюи1еи маи1пн1.1. например пресса. Оно может быть использовано при автоматизации нроиессов Н1там- повкп в различных отраслях машиностроения. 1.1елью пзобретен.ия яв,тяется упрои1енис конструкции и раснп рег ие технологических возможностей за счет новьппепия маневренности. Промыц, 1енн1 п 1 робот содержит нри- вод, связанный с механнческой рукой, вы- пол 1енной в виде гибкого вала, посредством муфты. Захватный орган меха1шческой руки выполнеп в виде двуплечих рычагов, подпружиненных один относите,:1ьно другого пружиной и связанных с гибким валом посредством BiiHTOBoii пары. Унрав, 1епие при- вода.ми нромьинлепного робота осушествля ется системой управления. При этом робот м.б. испо, 1ьзован во взрывоопасных зонах п труднодоступ.чых местах. 1 з.н. ф-лы, 3 ил. «5
12
13
18
77
Редактор С. Лисина Заказ 809/8
Составитель В. Ерошкин Техред И. ВересКорректор Т. Колб
Тираж 733Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений ь открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.З
| Манипулятор | 1981 |
|
SU1077780A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Крайнев А | |||
| Ф | |||
| Словарь-справочник по механизмам | |||
| М.: Машиностроение, 1981, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| д, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Белинин II | |||
| Н | |||
| Промышленные роботы | |||
| М.: .lauiи построение, 1975, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
