(54) ПРОМЫШЛЕЫ{-1ЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Рука промышленного робота | 1987 |
|
SU1542794A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
I
Изобретение относится к области машиностроения, в частности к промышленным роботам для автоматизации сборочных Сортировочных или складских работ, когда требуется большое число фиксированных точек позиционирования робо- та. ,
Промышленный робот может быть использован, например, для селективной сборки деталей, которые подаются на загрузочные и сборочные П031ЩИИ, расположенные вокруг робота.
Известен промышленный робот, содержащий механическую руку с захватами И приводы ее перемещения, в котором увеличение числа точек позиционирования обеспечивается соединением выходнозгр вала привода через дифференц шльный редуктор с несколькими стшовыми цгоитдрами tl .
Однако конструкция такого робота
сложна.
Цель изобретения - упрощение конструкции робота при увеличении числа точек поз}щионировапия.
Это достигается тем, что в предложенном роботе рука снабжена механизмом поворота, выполненным в виде последовательно соединенных модулей, каждый из которых содержит индивидуальный привод с -регулируемыми упорами, причем корпус привода каждого последующего модуля соединен с выходным валом привода предь1дущего модуля.
Связь эта может быть осуществлена . посредством поводковой муфты.
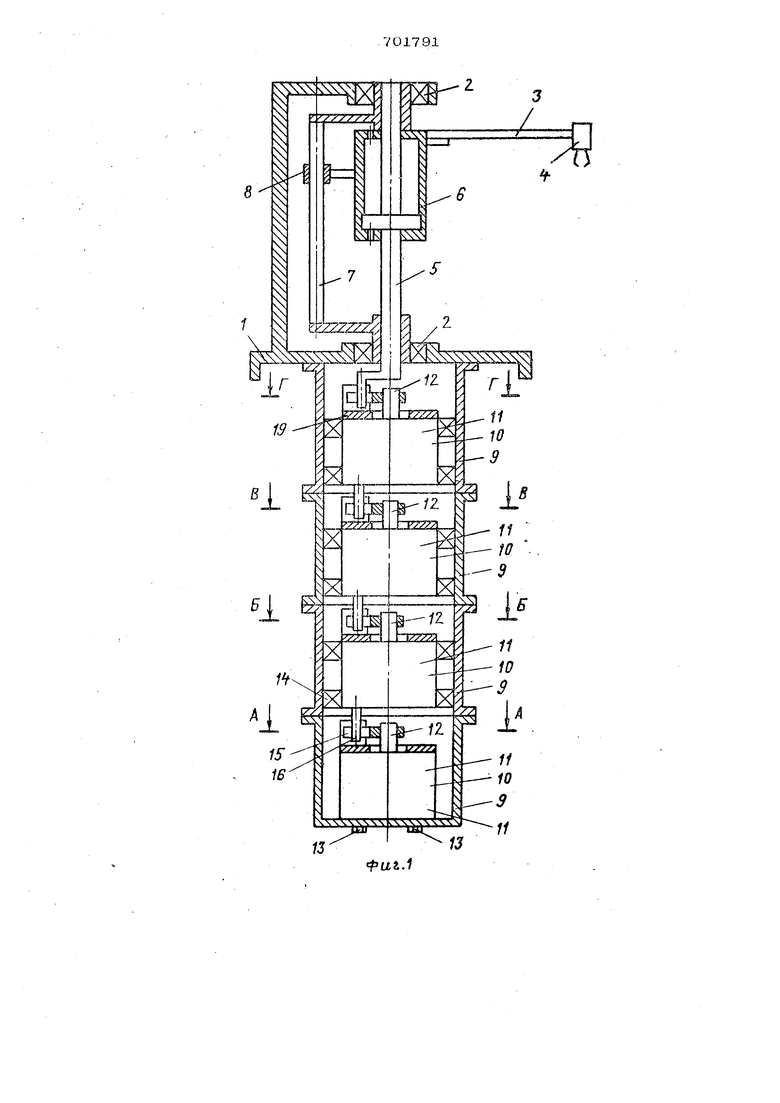
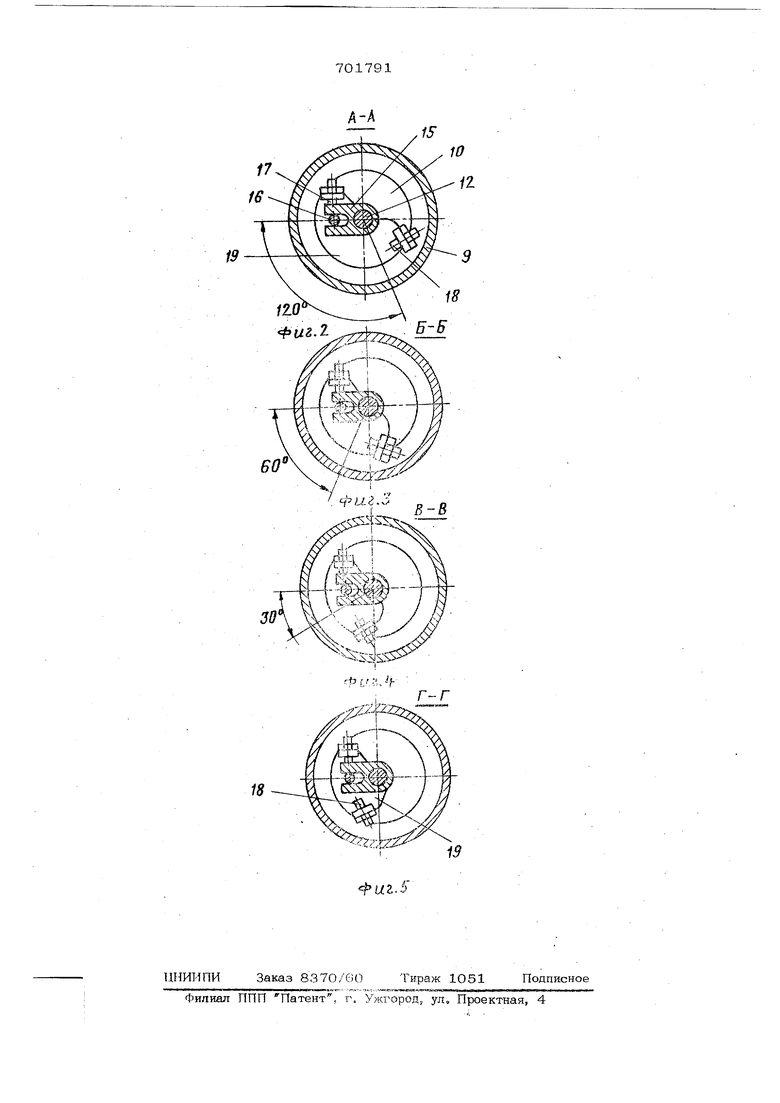
На фиг. 1 изображен предлагаемый робот, разрез; на фиг. 2 - сечение А-А на фиг. 1| на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 15 на фш 5 - сечение Г-Г на фиг.1.
Промышленный робот содержит основание 1, на котором в опорах 2 установлен привод вертикального перемещения руки 3 с захватом 4, выполненный в виде неподви шого в осевом направлении штока 5 и перемещающегося по нек1у пневмоцилиндра 6, несущего руку 3. Для повышения жесткости конструкции привода со штоком 5 связан направляющий стержень Т, по которому скользит втулка 8, соединенная с пневмоцилиидром 6. Шток 5 соединен с выходным валом механизма поворота руки 3 в горизонтальной плоскости, представляющим собой последовательно соединенные модули 9, каждый из которых снабжен индивидуальным двухпозиционным приводом 1О в виде моментного пневмодвигателя. Корпу са 11 приводов 10 второго и последующих модулей 9 (отсчет ведется снизу вверх по фиг. 1) соединены с выходными валами 12 приводов 10 предшеству- ющих модулей, что позволяет поворачи- вать руку 3 на угол, величина которого равна сумме углов поворота приводов 10 модулей 9. Корпус 11 привода 10 первого (нижнего по фиг. 1) модуля закреплен винтами 13, а корпуса 11 приводов второго и последующих модулей 9 установлены в подшипниках 14 и соедш:е ны с выходнымиВалами 12 предществу7о щих модулей посредством компенсирующего звена - поводковой муфты. Поводок 15 последней установлен на выходном валу 12, а палец 16 - на корпусе 11 привода 10 модуля 9. С помощью таког же компенсирующего звена механизм поворота руки 3 соединяется со штоком 5 привода вертикального перемещения. При менение для связи между приводами ком пенсирующего звена исключает влияние погрешностей установки отдельных приводов на точность позиционирования робота, Каждь1й корпус 11 привода 10 снабжен рег/лируемыми упорами 17 и 18, которые прикреплены к нему посредством пластины 19. Упоры 17 и 18 смещены один относительно другого на угол поворота выходных валов 12 приводов модулей. Максимально возможное число неповторяющихся комбинаций углов поворо- та, равное 2 где п. - число модулей, обеспечивается, например, если углы меж ду упорами 17 и 18 модулей относятся как члены геометрической прогрессии со знаменателем равным 2. Робот работает следующим образом. В исходном состоянии рука 3 робота находится над загрузочной позицией, пневмоцилиндр 6 поднят в верхнее поло- жение (фиг, 1), все выходные валы 12 приводов 10 поверну-ты до упоров 17 (фиг. 2-5). При поступлении детали на загрузочную позицию рука 3 опускается в нижнее положение при помощи пневмоцилиндра 6, а захват 4 зажимает деталь. Затем пнев- моцилиндр 6 поднимает руку 3 в верхнее положение. Подается команда на поворот руки 3 в горизонтальной плоскости на определенный угол. Угол поворота руки 3, заданный номером селективной группы, определяет коничество одновременно включаемых приводов 10 модулей 9, выходные валы 12 которых, поворачива- ясь каждый на свой угол, поворачивают шток 5 привода вертикального перемещения руки 3. , После поворота руки 3 до необходимой позиции пневмоцилиндр 6 опускает ее в нижнее положение, производя сборку. Затем захват 4 разжимается, рука 3 поднимается в верхнее положение. Включается реверс приводов 10, выходные валы 12 поворачиваются влево до упоров .17, возвращая руку 3 в исходное положение. Формула изобрете.ния 1. Промышленный робот, содержащий механическую руку с захватом и приво- дь1 ее перемеЕ1ения, отличающийс я тем, что, с целью упрощения конструкции при увеличении числа точек по-. зицирования, рука снабжена механизмом поворота, выполненным в виде ггоследовательно соединенных модулей, каждый из- которых содержит индивидуальный двухпозиционный привод с peгyлиpye ыми упо- рами, причем корпус привода каждого последующего модуля соединен с выходным валом привода предыдущего мо/гуля. 2. Робот по п. 1, о т л и ч а ющ и и с я тем, что связь корпуса привода каждого последующего моад.чя с выходным валом привода предыдущег-о модуля выполнена в виде поводковой муфты. Источники информации, принятые во внимание при экслерпгае 1. Авторское свидетельств: (.(.Л NO 528193, кл. В 25 J 9/ОО. 1i74.
Ш
18
.S
