(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Манипулятор | 1985 |
|
SU1289672A1 |
| Промышленный робот | 1978 |
|
SU861059A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
Изобретение относится к автоматическим нагрузочно-загрузочным роботам и может быть использовано при автоматизации процессов обслуживания транспортных, складский работ, операций установки и съема деталей и др.
Известен промышленный робот, содержсодий механические руки со встроенными приводами горизонтального перемещения и со сменными исполнительными органами, установленные на каретке с возможностью независимого поворота вокруг вертикальной оси 1 .
Недостатком известной конструкции является то, что приводы вертикального перемещения исполнительных органов расположены на последнем звене, что приводит к значительным динамическим нагрузкам и к усложнению конструкции.
Цель изобретения - упрощение конструкции и уменьшение динамических нагрузок.
Указанная цель достигается тем, что каретка робота снабжена силовыг. цилиндром, на штоке которого установлена одна механическая рука, а на гильзе - другая.
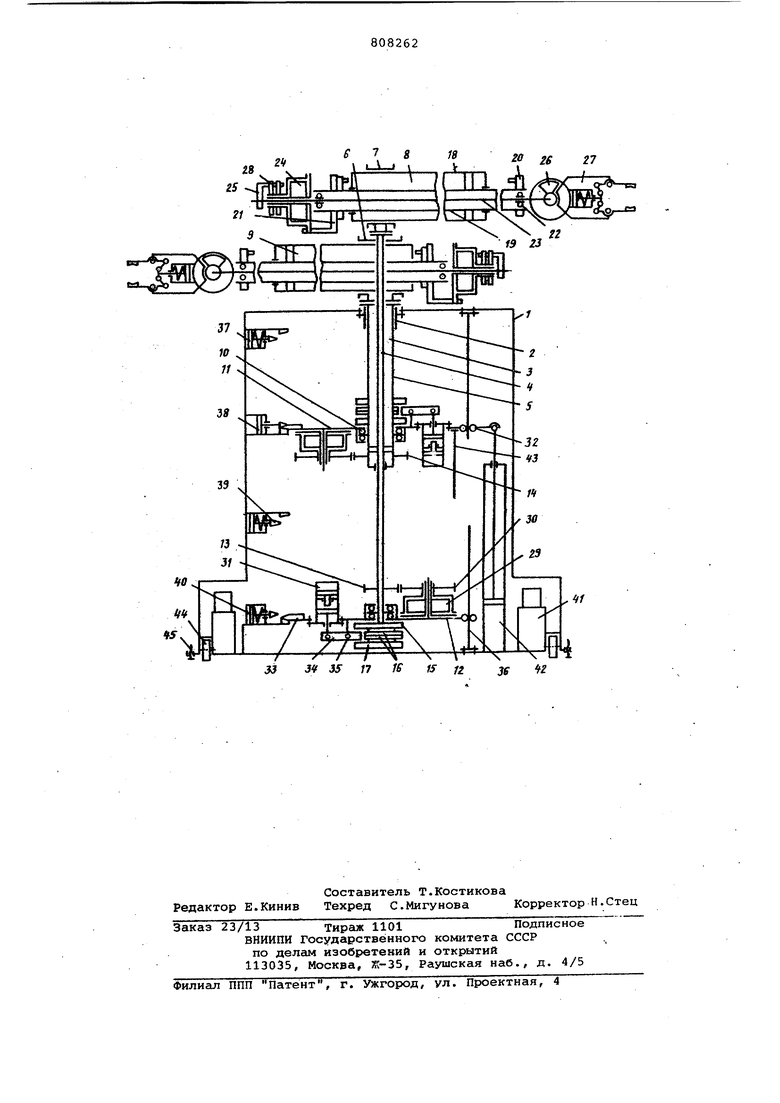
.На чертеже представлена кинематическая схема предлагаемого робота.
Промышленный робот содержит каретку 1, в направляющей втудке 2 которой установлен цилиндр 3. В верхней части цилиндра 3 на штоке 4 и на гильзе 5 с помощью клеммных зажимов 6 и 7 закреплены механические
0 руки 8 и 9, а в нижней шток 4 и гильза 5 через упорные подшипники 10 соединены соответственно с платформами 11 и 12. На штоке и на гильзе жестко установлены зубчатые коле5са 13 и 14 и регулируемые упоры 15, 16 и 17.
Рука 8 включает неподвижную гильзу 18 и поршень со штоком 19, на котором установлены передвижные упо0ры 20 и кронштейн 21. Для предотвращения вращения ось штока 19 смещена относительно оси гильзы 18. Внутри полого штока 19 на подшипниках качения 22 установлен вал 23, на одном
5 конце которого закреплены привод 24 вращательного движения и упор 25, на другом - перпендику|1ярно его оси привод 26, в корпус которого . встроены сменные схваты 27, на кор0пусе привода 24 крепятся два упора 28.
На платформах 11 и 12 установлены приводы 29 вращательного действи с жестко закрепленными на них зубчатыми колесами 30, трехпозиционные приводы 31 возвратно-поступательного перемещения, ролики 32 и регулируемые упоры 33. LJTOK привода 31 шанирно соединен с вьадвижным упором 34, который установлен на неподвижной оси 35. На основаниях корпуса каретки смонтированы вертикальные направляющие 36, на боковых стенках смонтированы npHBOj J 37-40 с делительными и выдвижными упорами и распределительные устройства 41.
Дополнительно робот снабжен приводом.возвратно-поступательного перемещения 42 и распорными устройствами 43. Каретка снабжена колесами 44 и домкратами 45. Все конечные упоры, ограничиваквдие перемещения, снабжены демпфирующим устройством. Система програг1много управления не показана.
Пpo Itaшлeнный робот работает следующим образом.
Две руки робота находятся в крайнем нижнем положении (фиг. 1). Приводом 38 с выдвижным упором платформа 11 зафиксирована в нижнем положении. Приводы 37, 39 и 40 отключены. При подаче воздуха в нижнюю полость цилиндра 3 шток 4 с рукой 8 и платформой 12 перемещается в крайнее верхнее положение до упора привода 39 и рука 8 при подаче воздуха в верхнюю полость цилиндра в крайнее нижнее положение. При нахождении руки 8 в крайнем верхнем положении в зафиксированном положении платформьа 12 выдвижным упоро привода 39 и при подаче воздуха в верхнюю полость цилиндра 3 гильза 5.с рукой 9 и платформой 11 перемещается в крайнее верхнее положение до упора привода 37. При подаче воздуха в нижнюю полость цилиндра 3 рука перемещается в крайнее нижнее положение.
При необходимости совместного перемещения рук 8 и 9 платформы 11 и 12 жестко скрепляются между собой распорными устройствами 43 и воздух подается в одну из полостей цилиндра привода 42.
При подаче воздуха в одну из полстей привод 29 врсйпательного действия вргцдение через зубчатые колеса 30 и 31 передается в одном случае
штоку 4 с рукой 8, в другом - гильзе 5 с рукой 9.
Угол поворота рук вокруг вертикальной оси регулируется упорами 16. Точка позиционирования при останове руки в промежуточном положении определяется и регулируется упорами 15 и 17 с клеммными зажимами.
Останов руки в промежуточном положении осуществляется поворотом выдвижного упора 34 вокруг неподвижной оси 35.
В среднем положении штока привода 31 поворот руки осуществляется между упорами 16, а при верхнем или нижнем положениях штока привода 31 осуществляется промежуточный останов причем при повороте руки в одном направлении выдвижной упор 34 всегда взаимодействует, например, с упором 15, а при пов9роте в обратном направлении - с упором 17.
При подаче воздуха в одну из полостей цилиндра 3 рук 8 и 9 поршень со штоком 19 перемещается в одно из крайних положений. Перемещение штока 19 регулируется передвижными упорами 20.
Вращение (ротация) вала 23 осуществляется от привода 24 вращательного действия. Угол поворота (ротации) регулируется упорами 28.
Поворот (качания) кисти руки осуществляется от привода 26 вращательного действия.Угол поворота (качания) кисти регулируется упорами.Зона обслу ;живания каждой руки может меняться поворотом клеммных зажимов 6 и 7 вертикальной оси цилиндра 3.
Формула изобретения
Промышленный робот, содержащий механические руки со встроенными приводами горизонтального перемещения и со сменными исполнительными органами, установленные на каретке с возможностью независимого поворота вокруг вертикальной оси, отличющийся тем, что, с целью упрощения конструкции и снижения динамических нагрузок, каретка снабжена силовым цилиндром, на штоке которого установлена одна механическая рука, а на гильзе - другая.
Источники информации, принятые во внимание при экспертизе
