Изобретение относится к области ма.шиностроения, ..например к промышленным роботам.
Известен промышленный робот, рука которого содержит кинематически свяэан.ные между собой и последоЕзательио присоединенные к поворотной платформе с неподвижным основанием пантографы и приводы перемещения руки 1J.
Недостатками известного робота являются сложное I конструктивное исполнение и низкая точность позиционирования
Целью изобретения является упрощение конструкции и по№ 1шение точности позиционирования.
Для этого кинематическая связь пантографов руки осуществляется посредством дополнительного пантографа, звень которого являются I общими со звеньями пантографов руки, а приводы перемещения руки расположены на поворотной платформе.
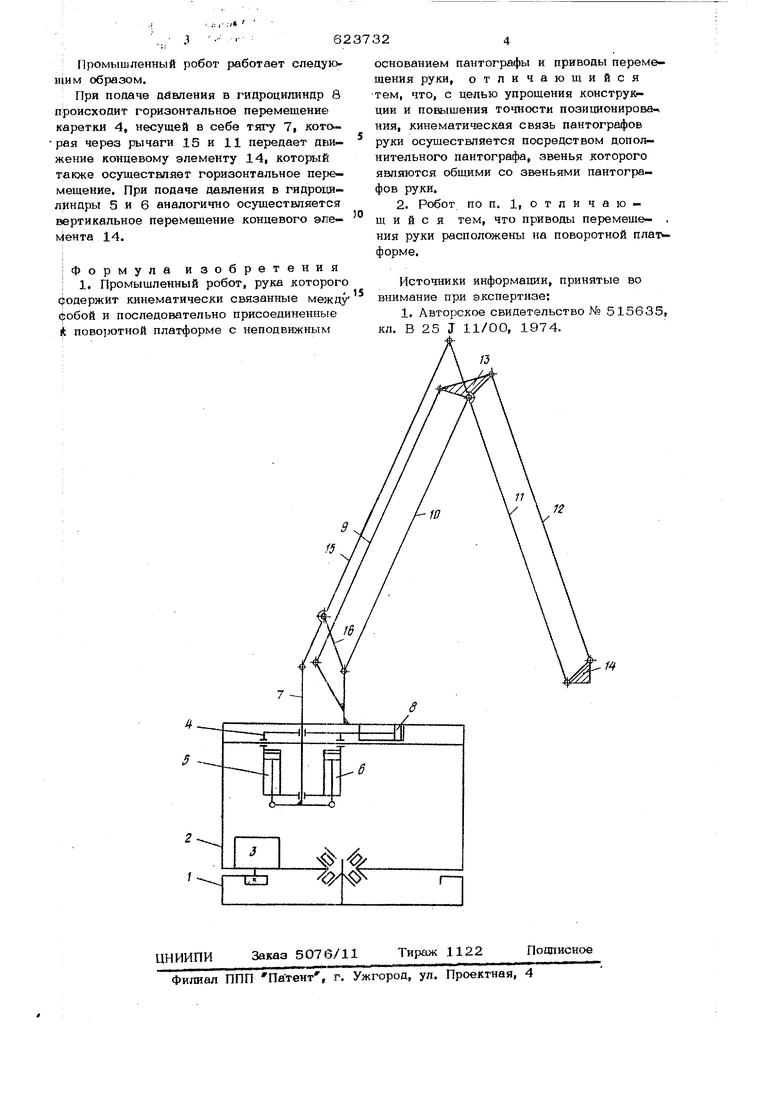
На чертеже представлена кинематическая схема промышленного робота.
Промышленнь й робот включает в себя основание 1, поворотную платформу 2, на которой расположен привод 3 поворота, каретку 4 с гкдроцилиндрами 5 и 6, ujap нирно связанн},1ми с тягой 7, и гидронилиндр 8, осущостгзляющий горизонтальное перемещение каретки 4. пантограф руки состоит из рычагов 9 и 10, а другой - из рычагов 11 и 12. Рычаги 9 и
10 шарнирно соединены с одной стороны с поворотной платформой, а с другой стороны - с промежуточным элементом 13, к которому так же шарнирно подсоединены рычаги 11 и 12 второго пантографа. Концевой элемент 14 шарнирно подсоединен к концам рычагов 11 и 12.
Кинематическая связь между пантографами руки осуществляется с помощью дополнительного пантографа, состоящего
из рычагов 15, 16, 10 и 11, шарнирно связанных между собой, а конец рычага 15, кроме того, шарнирно связан с тягой 7. Таким образом, дополнительный пантограф содержит звенья 10 и 11, общие
со звеньями пантографов руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085805A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1983 |
|
SU1096096A1 |
| Манипулятор | 1986 |
|
SU1454687A1 |
| Манипулятор | 1981 |
|
SU1038219A1 |
| Манипулятор | 1990 |
|
SU1764983A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Перегрузочный манипулятор | 1985 |
|
SU1247257A1 |
