00 Од
со
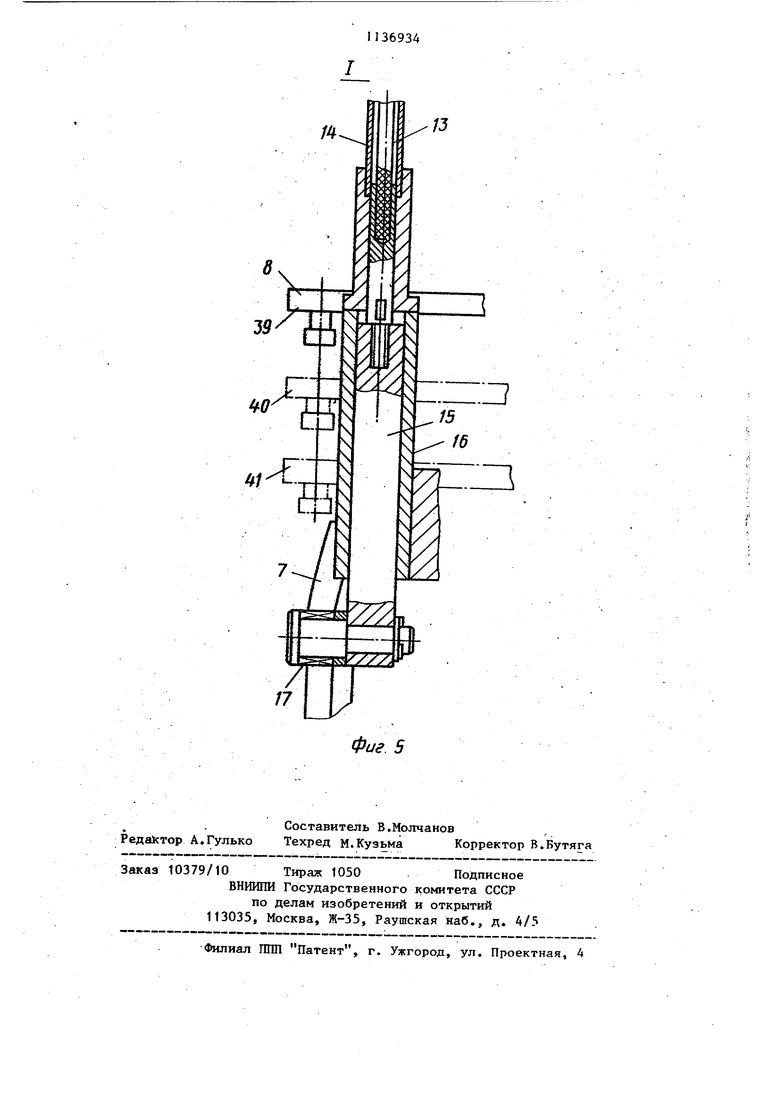
О9 i4 Изобретение относится к технологическому оборудованию для сборки и механообработки деталей на автоматических линиях и может быть широко применено в машиностроении, электрохимической промышленности и других областях техники. Известно манипулирунщее устройст(,в6 у. автоматическим линиям, содержа, щее ,сионтированный на станине подъем но-поворотный вал с механической f рукой и схватом, кулачково- рычажный механизм и привод Cl} Недостатками известного устройства являются низкая производительность и ограниченная сфера применения, так как оно может брать детали из одной точки и ставить тоже .только на одну точку. Цель изобретения - повышение производительИости и расширение технологических возможностей путем обеспечения возможности загрузки кассе поштучно или группами. Цель достигается тем, что манипулирунщее устройство к автоматичес ким лийиям, содержащее смонтированн на станине подъемно-поворотный вал с механической рукой и схватом, кулачково-рычажный механизм и привод, снабжено механизмом распределе ния деталей, выполненным в виде ползушки с роликом, установленной в направлякнцих, закрепленных на подъемно-поворотном валу, а мехамическая рука вьтолнена в виде каретки со схватами, причем ползушка одни концом кинематически связана с каре кой а другим посредством ролика им ет возможность взаимодействия с одним из рычагов кулачково-рычажног механизма и с дополнительно введенным неподвижным кулачком, установленным иа станине. На г. 1 показана кинематическа схема предлагаемого устройства; на фиг. 2 - механизм распределения деталей с механической рукой и привод его перемещения; на фиг. 3 - се А-А на фиг. 2; на фиг.4 - вид 8 на фиг. 2j на фиг. 5 - узел I на фиг. 1. Манипулирунидее устройство содержит станину 1, подъемно-поворотный вал 2 с механической рукой 3, рычажно-кулачковый механизм 4, механизм 5 распределения деталей, меха,низм 6 транспортирования кассет. нёподвидный кулачок 7, закрепленньй на станине, и подвижный упор 8, кинематически связанньй с рычажнокулачковым Механизмом 4, Механическая рука выполнена в виде каретки 9 с пружинными захватами 10, количество которых равно количеству рядов в кассете 11, и фиксатора 12 положения каретки. Каретка соединена гибким валом 13, заключенным в броневой кожух 14, с ползушкой 15 механизма 5 распределения деталей, установленной в направляющих 16, жестко закрепленных -на валу 2. На нижнем конце ползушки имеется ролик 17, взаимодействукщий с упором 8 и кулачком 7. Каждый захват 10 каретки 9 вьтолнен пружинным и снабжен упором 18 для раскрытия захватов при взаимодействии их с упором 19, установленным на станине или на линии сборки или механообработки со спутниками 20. Неподвижный кулачок 7 препнязня- . чей для возвращения каретки с захватами в исходное положение, а подвижньй упор 8 для перемещения каретки на шаг. Рычажно-кулачковый механизм 4 содержит распределительный вал 21 с четырьмя кулачками 22-25 и три рычага 26, 27 и 28. Рычаг 28 содержит упругий злемент 29 и зубчатый сектор 30. Подъемно-поворотный вал имеет шестерню 31, взаимодействующую с зубчатым сектором 30, и шаровую опору 32, взаимодействующую с рычагом 27. На станине установлены жесткие регулируемые упоры 33, задаклцие угол поворота вала 2. Механизм 6 транспортирования 11 вьтолнен в виде цепного транспортера 34, перемещение которого на шаг осуществляется специальным выступом 35 на кулачке 25, а кассета имеет палец 36, входящий между роликами цепи. Привод 37 устройства осуществляется или индивидуально, или от вала отбора мощности автоматической линии 20. Устройство работает следующим образом. Оператор устанавливает касаету 11 на механизм 6 транспортирования.
3
механическая рука занимает положение 38, каретка 9 занимает крайнее правое положение, а подъемно-поворотный вал занимает крайнее верхнее положение.
Включается привод. Вал 2 от рычага 27 и кулачка 23 перемещается вниз при этом пружинные захваты 10 зажимают весь ряд деталей, установленных в кассете. Далее вал 2 поднимается вверх с зажатыми йа каретке 9 деталями и поворачивается до упора 33 в. результате взаимодействия шестерни 31 с зубчатым сектором 30, рычагом 28, упругим элементом 29 и кулачком 22.
При. подаче спутников 20 автоматической линии вал 2 опускается вни при этом упоры 18 захватов 10, за:нявших положение напротив тех спутников, в которые устанавливается деталь, взаимодействуя с упором 19, разводят зажимы, и детали устанав ливаются в спутники. Рука поднимается вверх с оставшимися деталями.
Упор В, занимающий в начале цик,ла положение .39, от рычага 26 и кулачка 24 перемещается в положение 40 и, взаимодействуя с роликом 17 олзушки 15, через гибкий вал пё344
ремещает каретку 9 на шаг, которая стопорится фиксатором 12 каретки. При этом напротив загружаемых спутников устанавливаются следующие захваты с деталями.
Этот цикл повтоярется до тех пор, пока все детали не будут установлены, а каретка займет крайнее левое положение..При этом количество положений упора 8 (39, 40, 41) равно количеству циклов, необходимых для полного освобождения захватов от деталей.
Вал 2 возвращается в положение 38, при этом ролик 17 ползушки 15, контактируя с неподвижными кулачками 7, возвращает каретку в крайнее правое положение.
После захвата и подъема деталей первого ряда и поворота механической руки в позицию загрузки выступ 35 кулачка 25 входит в зацепление с цепью 34 и перемещает кассету 11 на шаг. Далее Щ1кл повторяется.
Использование предлагаемого изобретения позволяет автоматизировать загрузку и выгрузку деталей из многорядных кассет поштучно или группамиФие 2 (f (i.-fT ///////XX jQ43vVS V4 TVTYTY
1136934
/I-/4
Фиг.Ъ , 
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1013258A2 |
| Манипулятор | 1978 |
|
SU774940A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Манипулятор | 1978 |
|
SU727422A1 |
| Манипулятор | 1980 |
|
SU975383A1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ОКОНЧАТЕЛЬНОЙ ОБРАБОТКИ ЗУБЬЕВ КОЛЕС | 1969 |
|
SU240463A1 |
| Автомат для сборки пряжек | 1973 |
|
SU484967A1 |

МАНИПУЛИРУИЧЕЕ УСТРОЙСТВО К АВТОМАТИЧЕСКИМ ЛИНИЯМ, содержащее смонтированный на станине подъемноповоротный вал с механической рукой и схватом, кулачково-рычажный механизм и привод, отличающеес я тем, что, с целью повышения его производительности и расширения технологических возможностей путем обеспечения возможности загрузки кассет поштучно или группами, оно снабжено механизмом распределения деталей, выполненным в виде долзушки с роликом, установленной в направляющих, закрепленных на подъемноповоротном валу, а механическая рука вьтолнена в виде ка.ретки со схватами, причем ползушка одним концом кинематически связана с кареткой, а другим посредством ролика имеет возможность взаимодействия с одним из рычагов кулачково-рычажного механизма и с дополнительно введенным т неподвижным кулачком, установленным на станине.
в
/J
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
