(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ОБЪЕКТА ПО КРАТЧАЙШЕМУ ПУТИ
1
Изобретение относится к автоматизации производствен 1ых процессов и может быть использовано для управления механизированными стеллажами, конвейерами, гаражами, библиотеками и т. д.
По основному авт. св. М 578241 известно устройство, содержащее задатчик адреса, выполненный на переключателе и соединенный с блоком управления движе- ,0 нием объекта не блоком выбора направления движения, причем блок выбора направления движения выполнен на переключателе, неподвижные контакты которого размещены по окружности и их число раБ-|5 но числу позиций адресования, а его подвижный контакт выполнен в виде Колукруга, перекрывающего по меньшей мере половину неподвижных контактов переключателя l.20
Однако в этом устройстве не обеспечивается точность адресования, так как имеет место зона нечувствительности при реверсивном управлении приводом стеллажа, т.е. при перемещении объектов Вверх они останавливаются у разгрузочного окна в одном положении, а при перемещении Вниз - ниже, и эта зона нечувствительности наглядно демонстрируется, если при прибытии запрашиваемого объекта по адресу нажать на кнопку Пуск и в таком положении удерживать ее некоторое время, то в течение этого времени привод стелл 1жа будет поочередно и непрерывно реверсировать, а адресный объект будет поочередно дергаться то Вверх, то Вниз на величину погрешности. Эта зона нечувствительности (погрешности) подучается из-за конструктивных особенностей блока выбора направления движения и схемного выполнения блока управления, т.е. перемещение Вверх происходит до тех пор, пока подвижный контакт блока выбора направления движения полностью не освободит заадресованный неподвижный контакт,, а перемещение Вниз происходит до тех пор, пока подвижный контакт, наоборот, полностью не перекроQ4ет заадресованный непбдвижный контакт, спедоватепьно, величина погрешности ot опредепяется размером контакта о1« умноженного на величину масштаба (М), и по практическим данным (d. 3 мм, М 1:1ОО) выпивается в довольно внуши тельную величину ( 3X100 300 мм). Такая большая зона нечувствительности (погрешности) при адресовании объектов значительно сказывается на надежности работы устройства, что приводит к неудобствам в обслуживании объекта , и значительно усложняет возможность автоматизаиии погрузочно-разгрузочных
раций.
Цель изобретения - повышение надежности работы устройства.
Цель достигается тем, что в устрой- стве вал, соединяющий привод объекта с подвижным контактом, выполнен разъемным, а блок выбора направления движения снабжен механизмом корректировки зоны нечувствительности, содержащим втулки с пазами, одна из которых жестко закреплена на валу со стороны привода объекта и выполнена с пазом, параллельным этому валу, а другая закреплена на валу со стороны подвижного контакта и выполнена с пазом под углом к оси вала, причем втулки соединены подпружиненной направляющей, несущей на противоположных концах пальцы, входящие в пазы втулок, через один из кото.рых направляющая кинематически связана с приводом ее перемещения, имеющим ограничители хода направляющей, контакты которых включень в цепи питания реле блока управления движением объекта, который дополнительно содержит программное реле, замыкающий контакт которого включен в цепь питания привода направляющей.
Кроме того, блок управления движением объекта дополнительно содержит пусковое реле, через замыкающие контакты которого задатчик адреса подключен к источнику питания и в цепь питания обмотки которого включен размыкающий контакт лрограм1 ного реле.
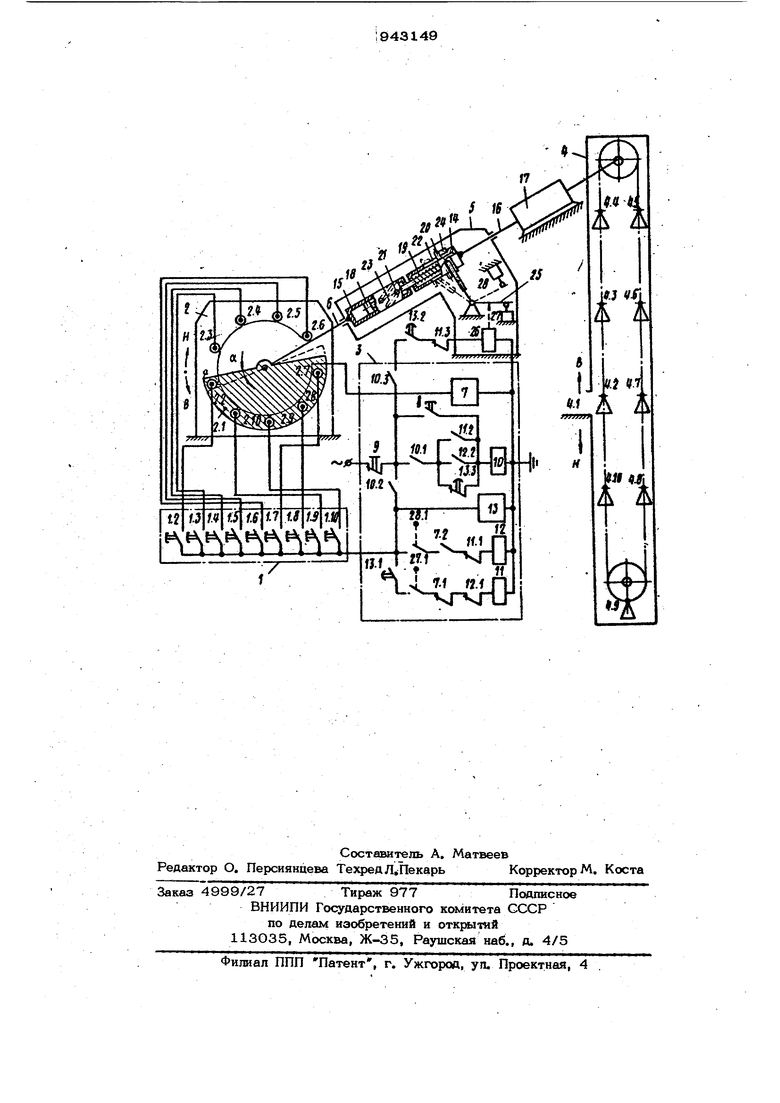
На чертеже показана схема устройства.
Устройство содержит задатчик 1 адреса, иыполненный на клавишном переключателе с контактами 1.1-1.1О, блок 2 выбора направления движения, образован-, ный подвижным контактом 2 .1 и неподвижными в виде бесконтактных элементов 2.2-2.10, блок 3 управления движением
портной трассе объекта 4 по количеству подвесок 4.2-4.10 адресования и выполнены, например, индуктивными или магнитоуправляемыми. Подвижный контакт 2.1 в виде полукруга, перекрывающий по крайней мере половину элементов 2.22.10 и взаимодействующий с ними через воздушный зазор, закреплен на валу 6.
Блок 3 включает в себя командный аппарат 7, имеющий контакты 7.1-7.2 и соединенный с элементами 2.2-2.10 блока выбора направления движения, кнопки 8 Пуск и 9 Стоп, соединенные с пусковым реле 10, имеющим контакты 1О.110.3, реле 11 команды Вниз с контактами 11.1-11.3 и реле 12 команды Вверх с контактами 12,1-12.2, а также программное реле 13 последовательности включения исполнительных команд с контактами 13.1-13.3.
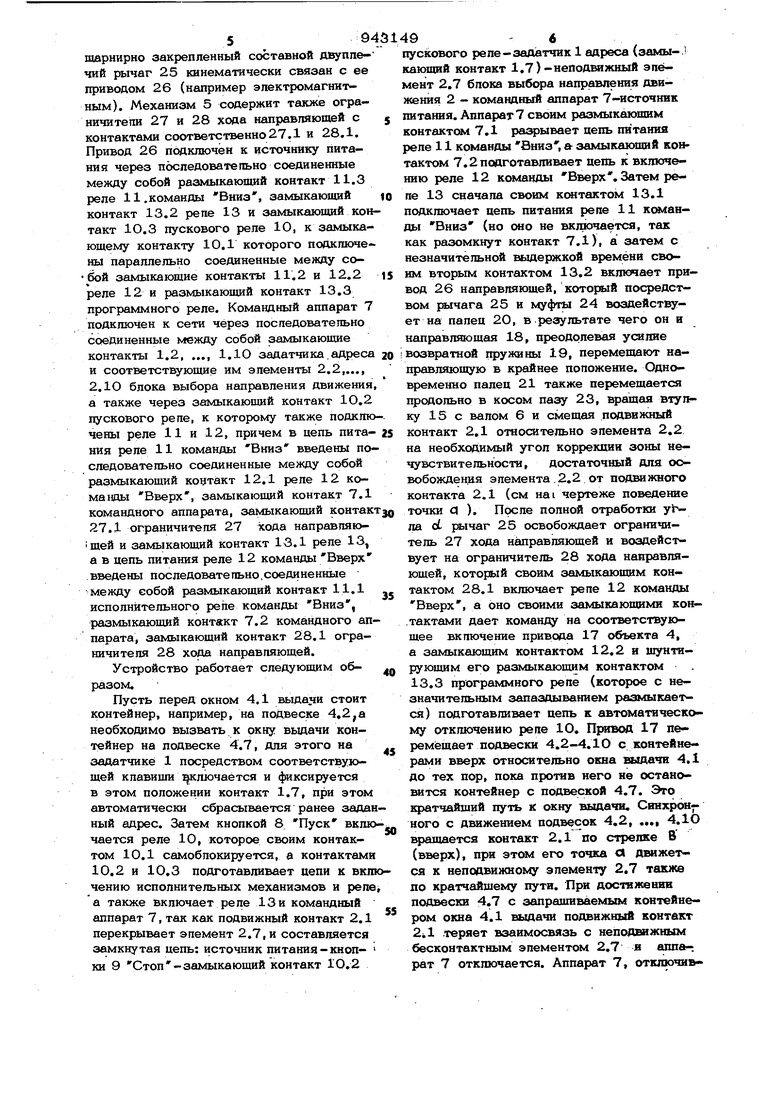
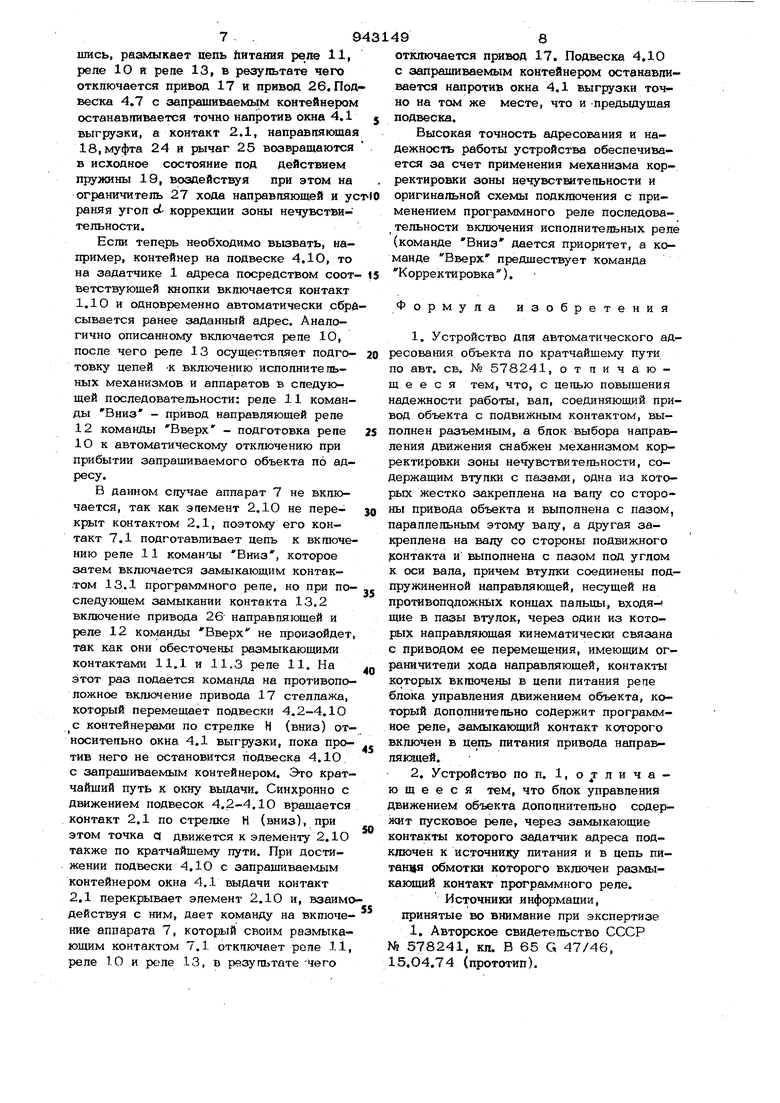
Эти реле подключены к источнику питания через замыкающие контакты 10.1 и 10.2 пускового реле. Механизм 5 состоит из двух соосно расположенных втулок 14 и 15, одна из которых 14 - жеско закреплена на оси 16 привода 17 стелажа, а втулка 15 - на валу 6 и соединены они между собой направляющей 18, снабженной возвратной пружиной 19 и закрепленными на ее противоположных концах перпендикулярно оси вращения пальцами 2О и 21,, выходящими из втулок через соответствующие пазы 22 и 23, причем на втулке 14 паз 22 выполнен параллельным оси вала, а на втулке 15 под углом oL к оси вала, равным углу коррекции зоны нечувствительности, т.е. достаточным для того, чтобы подвижный контакт 2.1 перед командой Вверх освободил необходимый бесконтактный элемент, например, 2.2 (см. чертеж), при этом направляющая. 18 через выступающий палец 20, скользящую муфту 24 и Q объекта 4, например, стеллажа с окном 4.1 шадачи и подвесками 4.2-4.1О и механизм 5 корректировки зоны нечувствительности. Клавишный переключатель задатчика 1 выполнен с зависимой фиксацией замыкаюших контактов 1-. 2-1.10, т е. при нажатии на клавишу она фиксируется в положении Включенои замыкает соответствующий ей контакт, при этом остальные клавиши и контакты возвращаются в исходное положение. Элементы 2,2-2,iO блока 2 расположены по кругу в соответствующем масштаб по отношению к замкнутой трансщарнирно закрепленный составной двуплечий рычаг 25 кинематически связан с ее приводом 26 (например электромагнитным). Механизм 5 содержит ограничители 27 и 28 хода направляющей с контактами соответственно 27.1 и 28.1. Привод 26 подключен к источнику питания через последовательно соединенные между собой размыкаюпшй контакт 11.3 репе 11.команды Вниз, замыкающий контакт 13.2 реле 13 и замыкающий кон такт 1О.З пускового реле Ю, к замыкающему контакту 10.1 которого подключены параллельно соединенные между со бой замыкающие контакты 11.2 и 12.2 репе 12 и размыкающий контакт 13.3 программного реле. Командный аппарат 7 подключен к сети через последовательно соединенные между собой замыкающие контакты 1.2, .... 1.1О задатчика.адреса и соответствующие им элементы 2.2,..., 2.10 блока выбора направления движения а также через замыкающий контакт 1О.2 пускового реле, к которому также подклю чены репе 11 и 12, причем в цепь питания реле 11 команды Вниз введены последовательно соединенные между собой размыкающий контакт 12.1 реле 12 коMaiiObi Вверх, замыкающий контакт 7.1 командного аппарата, замыкающий контак 27.1ограничителя 27 хода направляю щей и замыкающий контакт 13.1 реле 13, а в цепь питания реле 12 командыВверх введены последовательно,соединенные между собой размыкающий контакт 11.1 исполнительного репе команды Вниз, размыкающий контакт 7.2 командного аппарата, замыкающий контакт 28.1 ограничителя 28 хода направляющей. Устройство работает следующим образом. Пусть перед окном 4.1 ш 1даз1и стоит контейнер, например, на поД веске 4,2,а необходимо вызвать к окну вьщачи контейнер на подвеске 4.7, Для этого на задатчикё 1 посредством соответствующей клавицга лючаётся и фиксируется в этом положении контакт 1.7, при этом автоматически сбрасывается ранее задан ный адрес. Затем кнопкой 8 Пуск вклю чается репе 10, которое своим контактом 10.1 самоблокируется, а контактами 10.2и 10.3 подготавливает иепи к вклю чению исполнительных механизмов и реле а также включает репе 13 и командный аппарат 7, так как подвижный контакт 2.1 перекрывает элемент 2.7,и составляется замкнутая цепь: источник питания - кнопки 9 Стоп-замыкающий контакт 1О.2 пускового peлe-зaдiaтчик 1 адреса (замыкающий контакт 1.7)-неподвижный элемент 2.7 блока выбора направления движения 2 - командный аппарат 7-источник питания. Аппарат7 своим раамыкакнпим контактом 7.1 ра ывает цепь пнтаниа реле 11 команды Вниз, & замыкающий контактом 7.2 подготавливает цепь к включению реле 12 команды Вверх. Затем реле 13 сначала своим контактом 13.1 подключает цепь питания реле 11 команДЬ1 Вниз (но оно не включается, так как разомкнут контакт 7.1), а затем с незначительной выдержкой времени своим вторьп контактом 13.2 вклкяает привод 26 направляющей, который посредством рлчага 25 и муфта 24 воздействует на палец 20, в результате чего он и направляющая 18, преодолевая уоигае возвратной 19, перемешают направляющую в крайнее положение. Одновременно палец 21 также перемещается продольно в косом пазу 23, врашая втулку 15 с валом 6 и смещая подвижный контакт 2.1 относитепьно элемента 2.2 на необходимый угол коррекции зоны нечувствительности, достаточный для освобождения элемента,2.2 от подвижного контакта 2.1 (см на i чертеже поведение точки С( ). После полной отработки угла d рычаг 25 освобождает ограничитель 27 хода направляющей и воздействует на ограничитель 28 хода направляющей, который своим замыкающим контактом 28.1 включает реле 12 команды Вверх, а оно своими замыкающими кон. тактами дает команду на соответствующее включение привода 17 объекта 4, а замыкающим контактом 12.2 и шунтирующим его размыкающим контактом 13.3 программного реле (которое с незначительным запаздыванием размыкается) подготавливает цепь к автоматическому отключению реле 10, Привод 17 перемещает подвески 4.2-4.10 с контейнерами вверх относительно окна выдачи 4.1 до тех пор, пока против него не остано тся контейнер с подвеской 4.7. Это фатчайщий путь к окну выдачи. Свнхровного с движением подвесок 4,2, ..,, 4.1О вращается контакт 2.1 по стрелке В (вверх), при этом его точка С1 движется к неподвижному элементу 2.7 также по кратчайщему пути. При достижении подвески 4.7 с запращиваемым контейнером окна 4.1 выдачи подвижный контакт .теряет взаимосвязь с неподвижным бесконтактным элементом 2,7 в аппа-. рат 7 отключается. Аппарат 7, отключившись, размыкает цепь Литания реле 11, реле 10 и реле 13, в результате чего отключается привод 17 и привод 26, Под веска 4.7 с запрашиваемым контейнером останавливается точно напротив окна 4.1 выгрузки, а контакт 2.1, направпяюшая 18, муфта 24 и рычаг 25 возвращаются в исходное состояние под действием пружины 19, воздействуя при этом на ограничитель 27 хода направляющей и ус раняя угол d- коррекции зоны нечувствительности. Если теперь необходимо вызвать, например, контейнер на подвеске 4.10, то на задатчике 1 адреса посредством соответствующей кнопки включается контакт 1.10 и одновременно автоматически сбра сывается ранее заданный адрес. Аналогично описанному включается реле 10, после чего реле 13 осуществляет подго- товку цепей -к включению исполнительных механизмов и аппаратов в следующей последовательности: реле 11 команды Вниз - привод направляющей реле 12 команды Вверх - подготовка реле 1О к автоматическому отключению при прибытии запрашиваемого объекта по адресу. В данном случае аппарат 7 не включается, так как эпемент 2.10 не перекрыт контактом 2.1, поэтому его контакт 7.1 подготавливает цепь к включению реле 11 комангцэ Вниз, которое затем включается замыкающим контактом 13.1 программного реле, но при последующем замыкании контакта 13.2 включение привода 26 направляющей и реле 12 команды Вверх не произойдет так как они обесточены размыкающими контактами 11.1 и 11.3 реле 11. На этот раз подается команда на противоположное включение привода 17 стеллажа, который перемещает подвески 4.2-4.10 с контейнерами по стрелке Н (вниз) относительно окна 4.1 выгрузки, пока прю- тив него не остановится подвеска 4.10 с запращиваемым контейнером. Это кратчайший путь к окну выдачи. Синхронно с движением подвесок 4.2-4.1О вращается контакт 2.1 по стрелке Н (вниз), при этом точка q движется к элементу 2.10 также по кратчайшему пути. При достижении подвески 4.10 с запрашиваемым контейнером окна 4.1 выдачи контакт 2.1 перекрывает элемент 2.10 и, взаимо действуя с ним, дает команду на включение аппарата 7, который своим размыкающим контактом 7.1 отключает реле 11, реле 1.0 и реле 13, в результате чего отключается привод 17. Подвеска 4.10 с запращиваемым контейнером останавливается напротив окна 4.1 выгрузки точно на том же месте, что и предьщущая подвеска. Высокая точность адресования и надежность работы устройства обеспечивается за счет применения механизма корректировки зоны нечувствительности и оригинальной схемы подключения с применением программного реле последовательности включения исполнительных реле (команде Вниз дается приоритет, а команде Вверх предществует команда Корректировка). Формула изобретения 1.Устройство для автоматического адресования объекта по кратчайшему пути по авт. св. № 578241, отличающееся тем, что, с целью повышения надежности работы, вал, соединяющий привод объекта с подвижным контактом, выполнен разъемным, а блок выбора направления движения снабжен механизмом корректировки зоны нечувствительности, содержащим втулки с пазами, одна из которых жестко закреплена на валу со стороны привода объекта и выполнена с пазом, параллельным этому валу, а другая закреплена на валу со стороны подвижного контакта и выполнена с пазом под углом к оси вала, причем втулки соединены подпружиненной направляющей, несущей на противопяложных концах пальцы, входя-( щие в пазы втулок, через один из которых направляющая кинематически связана с приводом ее перемещения, имеющим ограничители хода направляющей, контакты которых включены в цепи питания репе блока управления движением объекта, который дополнительно содержит программное реле, замыкающий контакт которого включен в цепь питания привода направляющей. 2.Устройство по п. 1, о / л и ч а ю щ е е с я тем, что блок управления движением объекта дополнительно содержит пусковое реле, через замыкающие контакты которого задатчик адреса подключен к Источни1ог питания и в цепь пи- обмотки которого включен размыкающий контакт программного реле. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР NS 578241, кп. В 65 G 47/46, 15.04.74 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объектов по кратчайшему пути | 1981 |
|
SU1025618A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1976 |
|
SU612869A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1986 |
|
SU1357321A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для позиционного управления объектом | 1986 |
|
SU1371955A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1479400A1 |