сд ю
flz
Изобретение относится к автома тике и может быть использовано пpeи мущественно при управлении положением телескопа.
Известны двухканальные системы управления телескопом, содержащие два следящих привода, выходы которых Соединены с входами дифференциального редуктора, на выходном валу которого установлен объект регулирования l .
Наиболее близкой к изобретению .по технической сущности является двухканальная система управления телескопом, содержащая задатчик, подключенный выходом к входу основного следящего -привода, соединенного выходом с входом объекта регулирования и одним из входов первого чувствительного блока, соединенного выходом через последовательно соединенные дополнительный привод подслеживания и второй чувствительный элемент с сумматором, установленным в основном следящем приводе
Недостатком известных систем является их низкая надежность.
Цель изобретения - повышение надежности системы.
Поставленная цель достигается тем, что в двухканальной системе управления телескопом, содержащей задатчик, сумматор, следящий привод, соединенн1зш выходом собъек,том регулирования и с одним из входов первого чувствительного блока, соединенного выходом с входо второго чувствительного блока, дополнительно установлено корректирующее устройство, соединенное входом с выходом второго чувствителного блока,.а выходом с первым входом сумматора, прдключенного вторым входом к выходу задатчика, а выходом к входу следящего привода.
На чертеже дана функциональная схема предлагаемой системы.
Система содержит задатчик 1, сумматор 2, чувствительный элемент 3, следящий привод 4, дифференциатор 5 первый чувствительньй блок 6, ключ 7, генератор 8 импульсов, блок 9 памяти, корректирующее устройство 10, второй чувствительный блок 11, рбъект 12 регулирования, усилитель 13 мощности, исполнительный двигагель 14, корректирующий блок 15. ,
Кроме того, обозначены; выходной сигнал i-r.o. блока U, ; вькодной сигнал следящего привода 4 cL входной сигнал системы /3 .
В состав следящего привода 4 входят чувствительньй элемент 3, дифференциатор 5, усилитель 13 мощноети, исполнительный двигатель 14, корректирующий элемент 15. В состав второго чувствительного элемента 11 входят генератор 8 импульсов, ключ 7 и блок 9 памяти.
В качестве задатчика 1 может быть применен программньйблок или вычислительная машина.
В качестве первого чувствительного блока 6 может быть применен оптико-электронный датчик рассогласования.
Система работает следующим образом.
При разомкнутом ключе 7 и нулевом сигнале на .входе корректирующего устройства 10 управление следящим приводом 4 осуществляется выходным сигналом задатчика U , который через сумматор 2 поступает на входы чувствительного элемента 3 и диф|)еренциатора 5. Задатчик 1 выполняет функции генератора многопараметрического сигнала задания U , параметры которого отслеживаются следящим приводом 4, в состав которого входят чувствительньй элемент 3, дифференциатор 5, усилитель 13 мощности, исполнительный двигатель 14, корректирующий блок 15. При этом дифференциатор 5 включён в следящем приводе 4 по извесной схеме. Порядок дифференциатора 5 выбирается исходя из требований к динамическим характеристикам следящего привода 4. Выходной сигнал следящего привода поступает на первый вход первого чувствительного блока 6, на второй вход которого поступает входной сигнал системы /ij..
Первый чувствительный блок 6 представляет собой оптико-электронньй датчик рассогласования, который вырабатывает сигнал рассогласования ежду положением объекта 12 регулиования и положением объекта сопро- ождения (не показан) ив котором олучение основной информации об отосительном положении объекта сопроождения дополняется преобразоваием лучистой энергии в электрическую. Первьй чувствительный элемент 6 вырабатывает сигнал U (Ь-2 - , который в момент замыкания ключа поступает через блок 9 памяти на вх корректирующего устройства 10. В последнем выходной сигнал блок 9 памяти претерпевает преобразование координат, так как обычно перемещение объекта 12 регулирования и формирование сигнала рассогласовани и /32 - 0 на выходе первого чувствительного блока 6 происходит в разных системах координат. Затем информация о сигнале U ft - d. пр вязывается по времени и преобразует ся в сигнал удобньй для сложени выходным сигналом U задатчика 1. Например, при управлении положением телескопа на вход корректирующего устройства 10 поступают сигнаЛЬ в координатах X и У картинной плоскости поля зрения первого чувст вительногЪ блока 6, а на его выходе формируется сигнал и,, в координатах опорно-поворотного устройства, на котором установлены объект 12 регулирования и первый чувствительный блок 6. В случае телескопа в азимутально-угломестной монтировке в кор ректирующем устройстве 10 производи ся преобразование входных сигналов 4У и ЛХ в координаты азимута ( 4 А и угла места (лЬ) по зависимостям А ДУ/cosh ЛЬ -ЗХ В томслучае, когда выходные сигналы и и и JJ задатчика 1 и корректирующего устройства 10 являются электрическими сигналами типа напряжений или токов, сумматор 5может быть выполнен в виде электрического дифференциала. При замыкании ключа 7, управляемого генератором 8 импульсов, в бло 9 памяти поступает сигнал рассоглас вания и между направлением на объе наведения и направлением оптической оси первого чувствительного блока 6. Величина этого сигнала рассогласования и запоминается в блоке 9 памяти на время такта коррекции ц. В корректирующем устройстве Ю выхо ной сигнал Ug блока памяти преобразуется в сигнал U по указанному ал горитму. Полученный сигнал сумми руется с сигналом задания U в сумматоре 2, на выходе которого форми2+ . Этот руется сигнал -т (О сигнал поступает на вход следящего привода 4. Величина времени замыкания ключа 7 выбирается на порядок меньше величины постоянной времени следящего привода 4, что позволяет избежать влияния контура коррекции, состоящего из первого 6 и второго 11 чувствительных блоков, на устойчивость, системы в делом. Последующее замыкание ключа 7 происходит только после окончания переходного процесса в следящем приводе 4, вызванного выходным сигналом Ug ci. блока 9 памяти. Для выполнения этого условия период замыкания ключа Т-, 1/fg, где fg частота генератора 8 импульсов, выбран по величине в четыре раза большим, чем величина постоянной времени следящего привода 4. Это позволяет отрабатывать любые по величине выходные сигналы U - /32 о первого чувствительного блока 6, потому что при отработке сигнала U ft используется его запомненное значение, и увеличение скорости движения изображения объекта сопровождения в поле зрения первого чувствительного блока 6 за счет скачкообразного изменения сигнала U не приводит к срыву автосопровождения. Временное пропадание выходного сигнала первого чувствительного блока 6 при большой скорости переходного процесса в следящем приводе 4 не оказьшает влияния на данную систему, так как в этом случае управление следящим при водом 4 осуществляется выходным сигналом сумматора 2. К моменту- следующего замыкания ключа 7 отработка скачкообразного изменения сигнала и 2 следящим приводом 4 заканчивается. При использовании предлагаемой системы повышение ее надежности в два раза по сравнению с известной достигается за счет того, что наличие в системе блока 9 памяти и ключа 7 практически исключило влияние каналов управления в системе, система управления приобрела новые качества; т.е. в ней режимы авто сопровождении не зависят от характеристик первого чувствительного блока 6 и после отработки выходного сигнала Цо корректирующего устройства 10 выходной сигнал Ug первого чувствительного блока 6 восстанавливается независимо от скорости с которой происходит слежение за объектом сопровождения; а также особое соединение сумматора 2 с остальными блоками системы позволило осуществить коррек; цию не только сигнала задания, но и всех его производных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная система с разделенной нагрузкой | 1984 |
|
SU1249476A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Следящая система | 1983 |
|
SU1105858A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Двухканальная следящая система | 1984 |
|
SU1193636A1 |
| Двухканальная система автоматического сопровождения телескопа | 1977 |
|
SU684504A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| ЦИФРОВАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 2000 |
|
RU2183848C2 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
ДВУХКАНАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕСКОПОМ, содержащая задатчик, сумматор, следящий привод, соединенный выходом с объектом регулирования и с одним из входов первого чувствительного блока, соединенного выходом с входом второго чувствительного блока, отличающаяся тем, что, с целью повышения надежности системы, в ней установлено корректирующее устройство, соединенное входом с выходом второго чувствительного блока, а выходом с первым входом сумматора, подключенного вторым входом к выходу задатчика, а выходом - к входу следящего привода.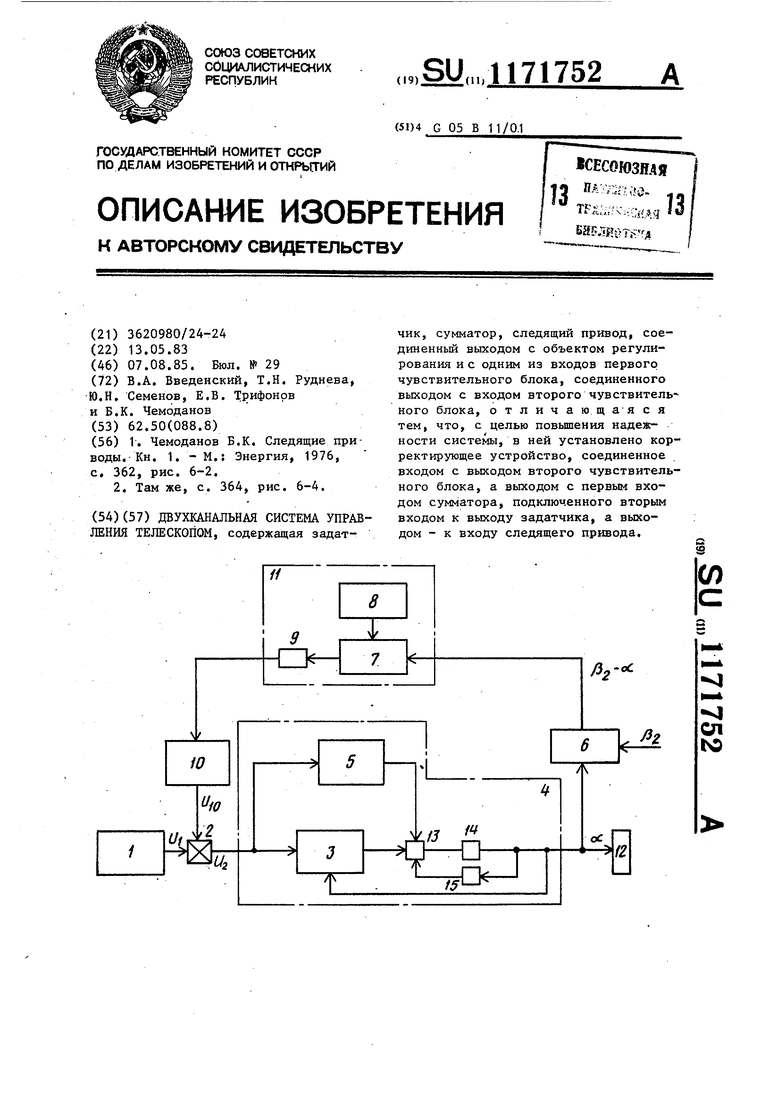
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чемоданов Б.К | |||
| Следящие приводы | |||
| Кн | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М | |||
| Энергия, 1976, с | |||
| Способ получения и применения продуктов конденсации фенола или его гомологов с альдегидами | 1920 |
|
SU362A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
