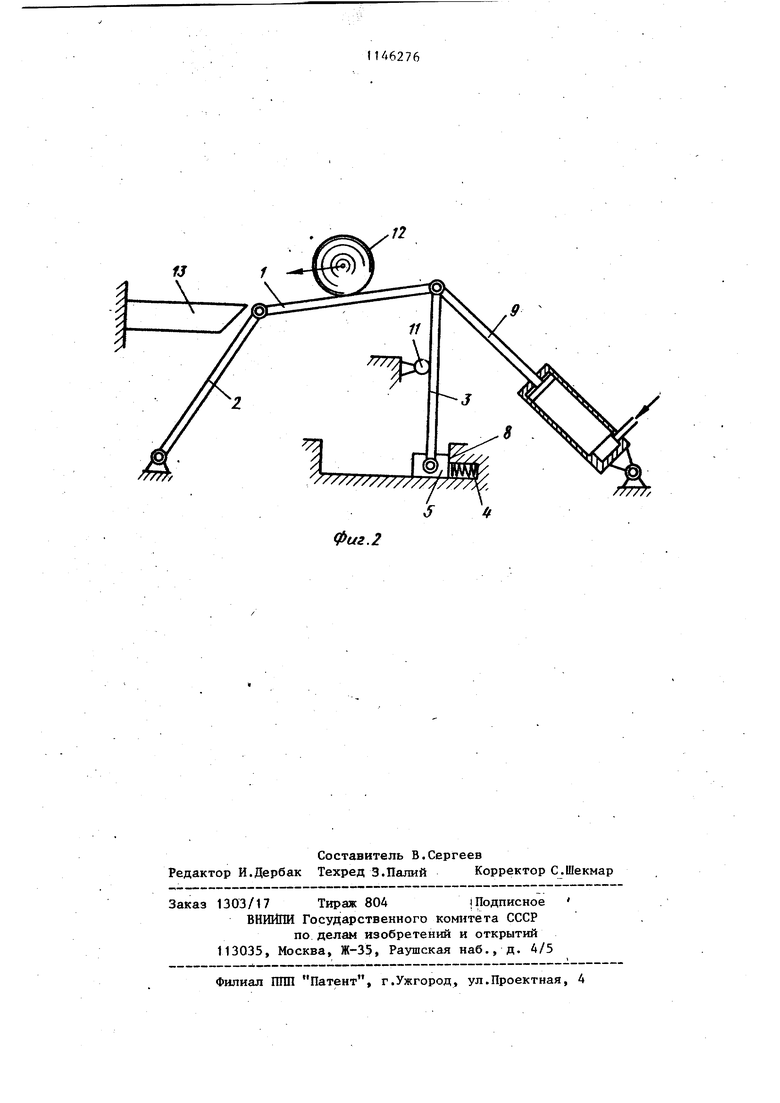
Фиг.1 - « Изобретение относится к грузопод емному средству, а именно к шарнирн рычажному механизму подъема, и может использоваться на транспорте, в частности на внутрицеховом транспорте предприятий химического, нефт Hoto машиностроения и в других отраслях промышленности. Известен шарнирно-рычажный механизм саморазгружающейся вагонетки, состоящий из опорной тележки и кузо ва, соединенных посредством двух шестизвенных механизмов. В известно устройстве осуществляется ряд после довательных движений звеньев Л . Однако данное устройство имеет сложную конструкцию. Наиболее близким к изобретению техническим решением является шарни но-рычажный механизм, содержащий осиьвание, платформу, два звена, одно из которых шарнирно закреплено ла основании одним концом, другие концы обоих звеньев шарнирно соединены с платформой, и привод,- установленный на основании и взаимодейс вующий с платформой. Другой конец второго звена также шарнирно закреплен на основании. Известный ме«-, ханиэм прост по конструкции 2J . Однако известный механизм имеет небольшие кинематические возможности, т.е. его звенья осуществляют только одно движение. Цель изобретения - расширение кия04атических возможностей механиз ма. Указанная цель достигается- тем, что шарн{фио-рычажный механизм, содержащий основание, платформу, два эвена, одно из которых шарнирно закреплено На основании одним концом другие котла обоих звеньев шарнирно соединены с платформой, и привод, установленный на основании и взаимо действующий с платформой, снабжен установленной на основании и именще ограничители направлякадей, размещен НШ4 в ней подпружиненным к ограничи телю ползуном, шариирно связанным с другим концом другого звена, и уп ром, установленньм на основании и взаимодействующим с этим звеном. 76J На фиг. 1 представлен шарнирнорычажный механизм, исходное положение; на фиг. 2 - то же, конец рабочего движения. Платформа 1 соединена шарнирно с звеньями 2 и 3, установленными шарнирно соответственно на неподвижном основании 4 и на ползуне 5, перемещающемся по расположенной на основании 4 направляющей 6 с ограничителями 7 и 8. Платформа 1 под действием веса находится на основании 4 и соединена шарнирно со штоком 9 привода 10. На основании 4 выполнен упор 11. Звенья 2 и 3 выполнены одинаковой длины и установлены параллельно. На платформе 1 установлен груз 12, который требуется передать на неподвижную площадку 13. Ползун 5 находится под действием возвратной пружины 14. Механизм работает следующим образом.. Шток 9 привода .10 толкает платформу 1 и она, опираясь на звенья 2 и 3, перемещается вверх параллельно исходному положению. Ползун 5 при этом упирается в ограничитель 7 и неподвижен. После касания звеном 3 упора 1 1 вращение звена 3 происходит вокруг этого упора. При этом ползун 5 перемещается до ограничителя 8. Так как звено Э к направляющая 6 составляют между Собой острый угол, то звено одновременно с вращательным движением по мере увеличения угла смещается относительно упора 11 вверх. Тем самым создается опережающий подъем края платформы 1, соединенного со звеном 3. Платформа 1 наклоняется, обеспечивая скатырание расположенного на ней груза 12 на площадку 13. При обратном ходе механизма отключается привод, ползун 5 отводится пружиной 14 до упора в ограничитель 7 и звено 3 устанавливается параллельно звену 2. Ппатформа 1, поворачивая звенья 2 и 3, под действием своего веса опускается на основание 4. Устройство при своей конструктивной простоте позволяет получить два последовательных движения платформы, что дает возможность использовать его как подъемно-разгрузочное.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Подъемник | 1978 |
|
SU695960A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Устройство для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности | 2023 |
|
RU2814695C1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Устройство для передачи штучных грузов | 1980 |
|
SU906856A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для амортизации объектов | 1978 |
|
SU765563A1 |
ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ, содержащий основание, платформу, |два звена, одно из которых шарнирно fj закреплено на основании одним концом, другие концы обоих звеньев шарнирно соединены с платформой, и привод, установленный на основании и взаимодействующий с платформой, отличающийся тем, что, с целью расширения кинематических возможностей, он снабжен установленной на основании и имеющей ограничители направляющей, размещенным в ней подпружиненным к ограничителю ползуном, шарнирно связанным с другим концом другого звена, и упором, установленным на основании и взаимодействующим с этим звеном. (Я
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М., Наука, 1979, т | |||
| I, с | |||
| КОПИРОВАЛЬНЫЙ СТАНОК ДЛЯ ДЕРЕВА | 1921 |
|
SU447A1 |
| Способ закалки паровозных и вагонных рессор | 1920 |
|
SU790A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же; с | |||
| Способ пропитывания дерева | 1921 |
|
SU446A1 |
| Приспособление для передвигания ленты в кинематографическом аппарате | 1920 |
|
SU788A1 |
