/ / /
91 26 24 /55 25 27 Фи&Л
Изобретение относится к автоматическому оборудованию для контроля и йожет быть использовано в роторно- Конвейерных машинах, оснащенных устройством для автоматической проверки контрольных роторов по эталонам.
Цель изобретения - повышение коэффициента исполъзорания машины за Јчет сокращения количества освобож- аемых на время поверки по эталонам транспортера-конвейера и проведения контроля изделий в процессе поверки.
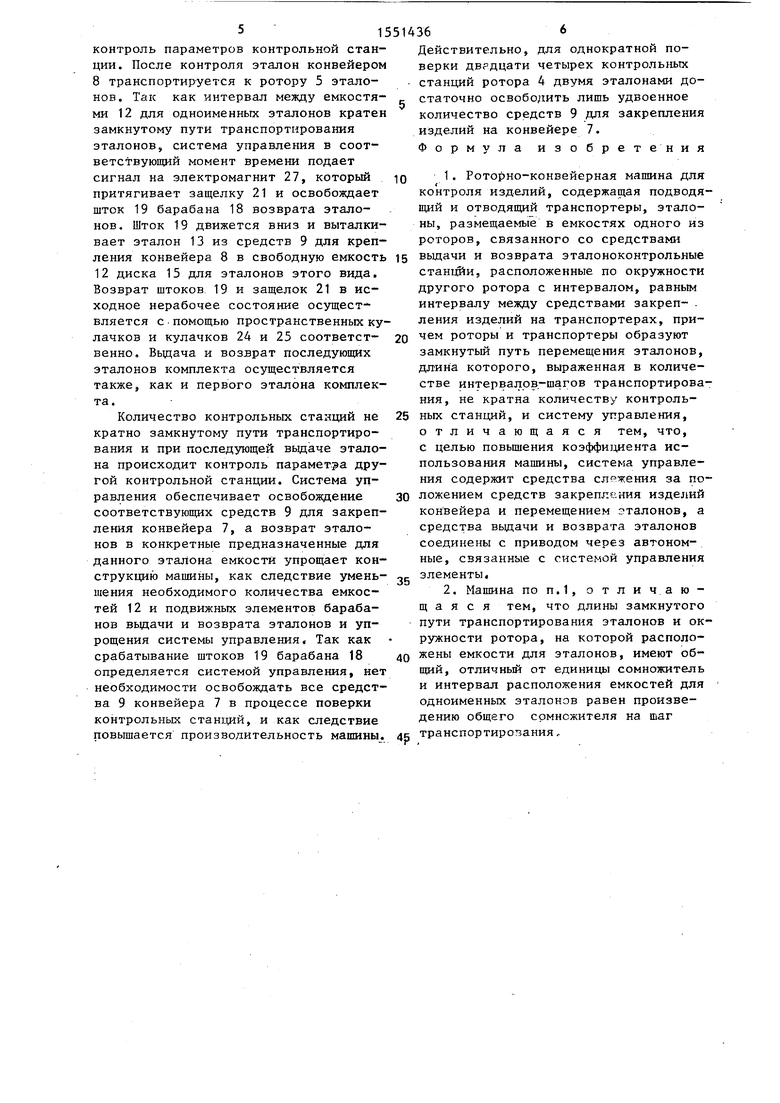
На фиг.1 изображена принципиальна ,хема машины; на фиг.2 - ротор эта- (понов, общий вид; на фиг.З - разрез )А-А на фиг. 2.
h
Роторно-конвейерная машина для контроля изделий-заготовок 1 содер- ркит установленные на станине 2 ротор 3 автомата питания, ротор 4 контроля ротор 5 эталонов, ротор 6 сортировки |и систему управления (не показана). Группы роторов 3-5 и 4-6 объединены подводящим и отводящим транспортерами-конвейерами 7 и 8 соответственно. На конвейерах 7 и 8 с интервалом-ша- ,гом транспортирования расположены средства 9 для закрепления контроли- руемых заготовок 1. В зоне вывода заготовок 1 на ротор 3 автомата питания установлен электромагнит 10 системы управления. В роторе 4 контроля по его окружности с интервалом, равным шагу транспортирования, расположены контрольные станции 11, а в |роторе 5 по окружности расположены емкости 12 для хранения одного или нескольких комплектов эталонов 13, причем интервал между емкостями 12 для хранения одноименных эталонов 13 кратен длине замкнутого пути перемещения эталонов, а количество контрольных станций 11 не кратно длине замкнутого пути перемещения эталонов выраженному в шагах транспортирования. Количество эталонов 13 в комплекте определено техническим процессом. На фиг.1 изображено устройство,
содержащее три комплекта эталонов по два эталона в комплекте с интервалом между емкостями 12 для одноименных эталонов 13, равным семи шагам транспортирования, и общей длиной окружности ротора 5 эталонов, равной двадцати одному шагу, длиной замкнутого пути транспортирования эталонов, равной сорока девяти шагам, и двадцать
0
5
0 5 о $
0
5
четыре контрольные станции 11 на роторе 4 контроля.
Ротор 5 эталонов содержит закрепленные на валу 14 диски 15 с емкостями 12 для эталонов 13, расположенную над диском 15 звездочку 16 для конвейеров 7 и 8 и барабаны 17 и 18 выдачи и возврата эталонов соответственно с соответствующего конвейера 7 и 8, каждый из которых снабжен подпружиненными штоками 19, установленными в ползунах 20 соосно емкостям 12 диска 15, и защелками 21 с роликами 22, установленными на торцовых дисках 23 барабанов 17 и 18, обращенных к диску 15. Для управления защелками 21 на станине 2 установлены кулачки 24 и 25, электромагниты 26 и 27 системы управления соответственно.
Роторно-конвейерная машина работает следующим образом.
Роторы 3-6 непрерывно вращаются с помощью привода (не показан), а конвейеры 7 и 8 перемещаются по заданной траектории, транспортируя заготовки
Iот ротора 3 автомата питания через контрольные станции 11 ротора 4 контроля к ротору 6 сортировки, где в зависимости от результатов контроля они выдаются либо в сборник 28 годных заготовок, либо в сборник 29 бракованных заготовок. При этом ползуны 20 совершают возвратно-поступательные движения от соответствующих пространственных кулачков (не показаны), охватывающих барабаны 1J и 18, а подпружиненные штоки 19 заперты защелками 21 .
Для проверки контрольных станций
IIэталонами 13 электромагнитом 10 системы управления отключают выдачу нескольких заготовок, количество которых равно количеству эталонов 13
в комплекте. Средства (не показаны) запоминания и слежения за положением освобожденных средств 9 для закрепления конвейера 7 системы управления выдают сигнал на электромагнит 26 при подходе освобожденных позиций к ротору 5 эталонов. При этом электромагнит 26 поворачивает защелку 21 и освобождает подпружиненный шток 19 барабана 17 выдачи эталонов 13,. Шток 19 движется вверх и перемещает эталон 13 из емкости 12 в средство 9 для закрепления конвейера 7, который передает эталон 13 в контрольную станцию 11 ротора 4, где происходит
контроль параметров контрольной станции. После контроля эталон конвейером 8 транспортируется к ротору 5 эталонов. Так как интервал между емкостями 12 для одноименных эталонов кратен замкнутому пути транспортирования эталонов, система управления в соответствующий момент времени подает сигнал на электромагнит 27, который притягивает защелку 21 и освобождает шток 19 барабана 18 возврата эталонов. Шток 19 движется вниз и выталкивает эталон 13 из средств 9 для крепления конвейера 8 в свободную емкость 12 диска 15 для эталонов этого вида. Возврат штоков 19 и защелок 21 в исходное нерабочее состояние осуществляется с помощью пространственных кулачков и кулачков 24 и 25 соответст- венно. Выдача и возврат последующих эталонов комплекта осуществляется также, как и первого эталона комплекта.
Количество контрольных станций не кратно замкнутому пути транспортирования и при последующей выдаче эталона происходит контроль параметра другой контрольной станции. Система управления обеспечивает освобождение соответствующих средств 9 для закрепления конвейера 7, а возврат эталонов в конкретные предназначенные для данного эталона емкости упрощает конструкцию машины, как следствие уменьшения необходимого количества емкостей 12 и подвижных элементов барабанов выдачи и возврата эталонов и упрощения системы управления. Так как срабатывание штоков 19 барабана 18 определяется системой управления, нет необходимости освобождать все средства 9 конвейера 7 в процессе поверки контрольных станций, и как следствие повышается производительность машины.
Действительно, для однократной поверки двадцати четырех контрольных станций ротора 4 двумя эталонами достаточно освободить лишь удвоенное количество средств 9 для закрепления изделий на конвейере 7. Формула изобретения
5 0
5 0 0 5
5
1.Роторно-конвейерная машина для контроля изделий, содержащая подводящий и отводящий транспортеры, эталоны, размещаемые в емкостях одного из роторов, связанного со средствами выдачи и возврата эталоноконтрольные станции, расположенные по окружности другого ротора с интервалом, равным интервалу между средствами закрепления изделий на транспортерах, причем роторы и транспортеры образуют замкнутый путь перемещения эталонов, длина которого, выраженная в количестве интервалов-шагов транспортирования, не кратна количеству контрольных станций, и систему управления, отличающаяся тем, что,
с целью повышения коэффициента использования машины, система управления содержит средства сложения за положением средств закрепл ния изделий конвейера и перемещением эталонов, а средства выдачи и возврата эталонов соединены с приводом через автономные, связанные с системой управления элементы,
2.Машина по п.1, отличающаяся тем, что длины замкнутого пути транспортирования эталонов и окружности ротора, на которой расположены емкости для эталонов, имеют общий, отличный от единицы сомножитель и интервал расположения емкостей для одноименных эталонов равен произведению общего сомножителя на таг транспортирования,
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная машина | 1986 |
|
SU1650273A1 |
| Устройство для проверки по предельным эталонам контрольных роторов | 1987 |
|
SU1773505A1 |
| Контрольно-сортировочное устройство | 1980 |
|
SU937055A1 |
| Устройство управления подвижными элементами | 1982 |
|
SU1148759A1 |
| Роторно-конвейерная машина для сортировки изделий | 1980 |
|
SU902866A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1118516A1 |
| Роторно-конвейерная машина | 1978 |
|
SU831627A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Ковшовый конвейер | 1979 |
|
SU848425A1 |
| Устройство для межоперационного транспортирования детален к станкам | 1941 |
|
SU66996A1 |
Изобретение относится к автоматизации контроля изделий и может быть использовано в роторно-конвейерных машинах для контроля изделий. Целью изобретения является повышение коэффициента использования роторно-конвейерной машины. Для этого система управления содержит средства слежения за положением свободных средств 9 для закрепления изделий на подводящем конвейере 7, связанные с электромагнитами 10, 26 и 27, управляющими подачей изделий в конвейер 7, выдачей эталонов и их возвратом соответственно, а емкости для одноименных эталонов 13 расположены с интервалом, величина которого равна произведению интервала между соседними средствами для закрепления изделий на общий сомножитель длин замкнутого пути перемещения эталонов и окружности ротора 5 эталонов, выраженных в интервалах-шагах транспортирования. 1 з.п. ф-лы, 3 ил.
| 0 |
|
SU161930A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
