2. Узел поп, 1, отли чающий с я тек, что датчик осевого положения выполнен в виде широкодиапазонного фотоэлектричес кого световодного преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Стенд для измерения силовых параметров в резьбовых соединениях | 1991 |
|
SU1781570A1 |
| УЧЕБНЫЙ СТЕНД СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ ВАЛА РОТОРА ЦЕНТРОБЕЖНОГО НАГНЕТАТЕЛЯ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2021 |
|
RU2780551C1 |
| Шпиндельный узел на электромагнитных опорах | 1983 |
|
SU1201113A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В МАГНИТНЫХ ПОДШИПНИКАХ | 2012 |
|
RU2518053C1 |
| Способ управления положением ротора электрической машины на бесконтактных подшипниках (варианты) и электрическая машина для его реализации | 2017 |
|
RU2656871C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| Шпиндельный узел /его варианты/ | 1980 |
|
SU917929A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
1. ЭЛЕКТРОШПИНДЕЛЬНЫЙ УЗЕЛ, содержащий корпус с установленным в нем ротором, передним и задним радиальньв и электромагнитными подшипк: ками, упорным подшипником датчики радиального и осевого положений ротора и соответствующие усилительно-преобразовательные устройства, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения осевого перемещения ротора, упорный подшипник выполнен в виде электромагнита соленовдного типа, а на дополнительный вход усилительно-преобразовательного устройства в цепи управления осевым положением ротора включены через сумматор соответственно блок опорных напряжений и генератор импульсов. ,,/J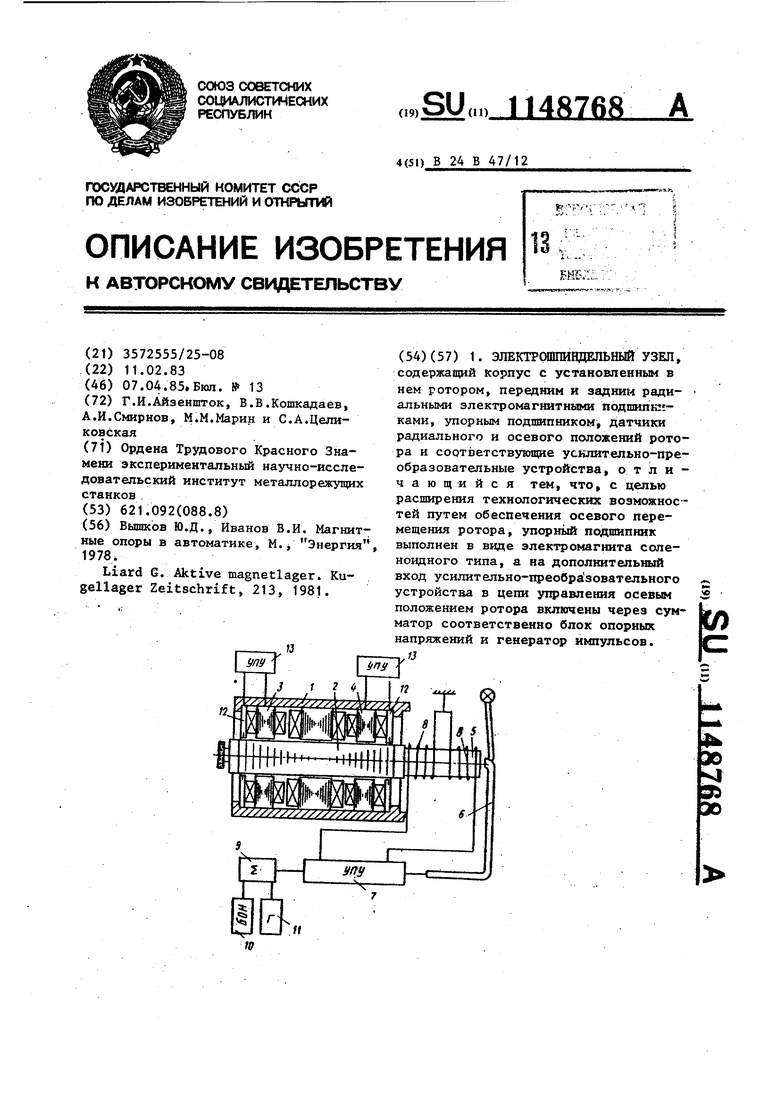
Изобретение относитсяг к станкостроению и может быть использовано в качестве электрошпиндельных внутришлифовальных станков. Цепью изобретения является расширение технологических возможностей шпиндельного узла путем обеспечения осевого перемещения ротора. Цель достигается тем, что в элект рошпиндельном узле, содержащем корпус с установленным в нем ротором, передним и задним радиальными электромагнитными подшипниками, упорным подшипником, датчики радиального и осевого положений ротора и соответст вующне усилительно-преобразовательны устройства, упорный подшипник вьшолнен в виде электромагнита соленоидно го типа, а на дополнительный вход усилительно-преобразовательного устройства в цепи управления осевым пол жением ротора через сумматор включен блок опорных напряжений и генератор импульсов. Кроме того, датчик осевого положе ния вьшолнен: з виде широкодиапазонного фотоэлектрического световодного преобразователя. На чертеже изображен электрошпиндельный узел. Электрошпиндельный узел содержит корпус 1, ротор 2, передний 3 и задний 4 электромагнитные подшипники, а также уГсорный подшипник 5 представляющий собой электромагнит соленоидного типа.В торце ротора установлен фотоэлектрический световодньй преобразователь 6, сигнал которого поступает в усилительно-преобразовательное устройство 7, соединенное с обмотками 8 управления электромагнита. На входе усилительно-преобразовательного устройства 7 включены че раз сумматор 9 блок 10 опорных напряжений и генератор 11. Устройство содержит также датчики радиального положения ротора 12, сигналы которых поступают в усилительно-преобразовательное устройство 13, соединенное с обмотками управления электромагнитньк подшипников 3 и 4. Фотоэлектрический световодньй преобразователь имеет достаточно большой линейный участок характеристики преобразования по перемещению, небольшие габариты чувствительной части датчика, хорошую электромагнитную совместимость с управляющей системой магнитной подвески, а также электромагнита осевого перемещения. Узел работает следующим образом. При необходимости обеспечения осевой жесткости и удержания ротора в фиксированном .осевом положении генератор 11 выключен, а в усилительнопреобразовательное устройство 7 поступает напряжение, характеризуемое положением торца ротора 2 относительно датчика 6 и напряжение от сумматора 9, питаемого блоком 10 опорных напряжений, характеризуемое расположением торца ротора 2 на середине рабочего участка преобразователя 6. Напряжение рассогласования поступает в усилительно-преобразовательное устройство 7, которое таким образом распределяет токи в обмотках 8 управления, следовательно, перемещает ротор 2, чтобы напряжение, поступающее от преобразователя 6, соответствовало напряжению, поступающему от сумматора 9. При этом ротор 2 устанавливается в положение, соответствующее середине рабочего участка датчика. При включении генератора 11 на выходе сумматора 2 появится переменная составляю1цая напряжения и усилительно-преобразовательное устройство 7 будет отслеживать это напряжение в каждый момент времени. При этом ротор 2 будет совершать осевые перемещения с частотой, определяемой час311487684
тотой генератора 11. Амплитуда пере-вестного, так как позволяет создать
мещений будет определяться соотноше-в самом узле механизм осцилляции и
нием амплитуд напряжений от генерато-подачи электрошпинделя. Электрошпинра 11 и блока 10 опорных напряжений.дель на электромагнитных подшипниках
Использование в качестве упорного 5расширяет технологические возможности
подшипника электромагнита соленоидно-оборудования, повышает долговечность
го типа выгодно отличает предлагае-шпиндельного узла, упрощает конструкмый электрошпиндельный узел от из-цию станка.
| Вьпшсов Ю.Д., Иванов В.И | |||
| Магни ные опоры в автоматике, M.j Энерги 1978 Liard G | |||
| Aktive magnetlager | |||
| Kugellager Zeitschrift, 213, 1981. |
