сл
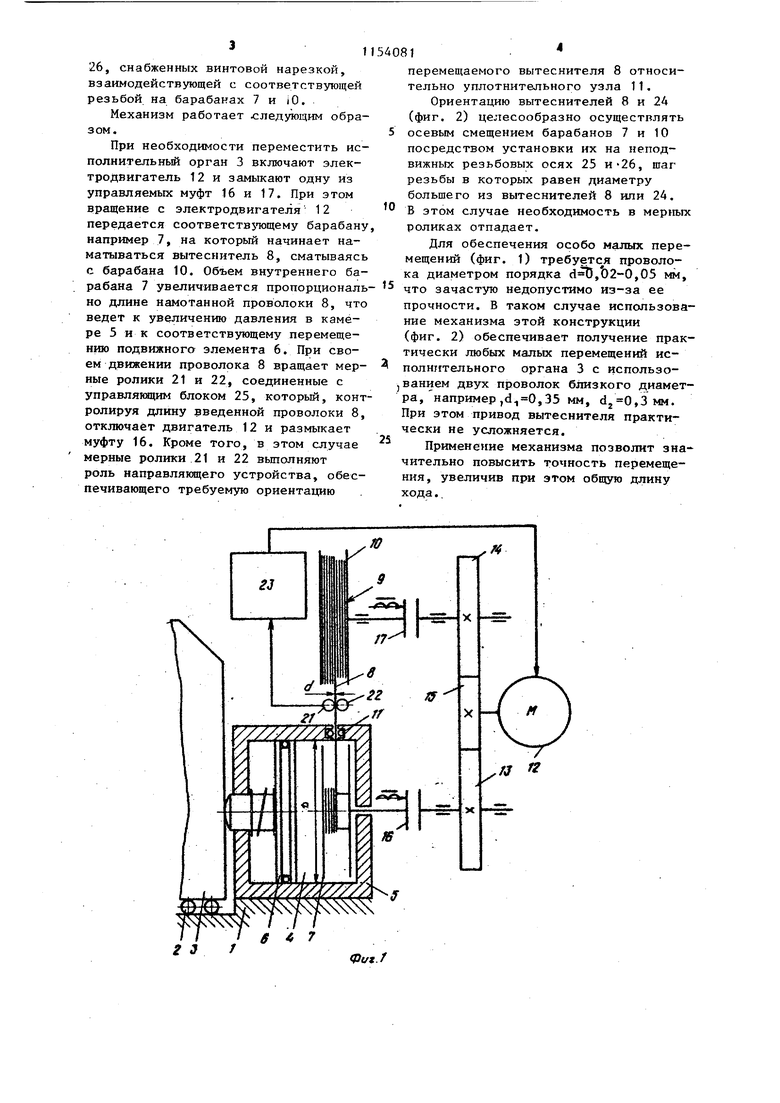
4i Изобретение относится к устройст вам, обеспечивающим точные перемещения исполнительных органов, напри мер шпиндельных бабок шлифовальных станков, и может.быть использовано в приборостроении. Известен механизм тонкой регулировки подачи шлифовальной бабки, содержащий мембранное устройство, перемещающее при изменении давления в герметичной мембранной камере шли фовальную бабку. Изменение давле- . ния в мембранной камере достигается посредством введения в последрпою плунжера, снабженного приводом осевых перемещений. Привод осевых пере мещений плунжера содержит редуктор, обеспечивающий необходимую скорость перемещения плунжера, которая определяет скорость подачи шпиндельной бабки Cl }. Недостатком известной конструкци является ограниченная возможность перемещения (хода) исполнительного органа, определяемая перец§;щёнием мембраны, зависящим, в свою очередь, от величины ввода плзгажера в герметичную камеру, т.е. от объема введенного вытеснителя, которьй ограйичен.по диаметру и длине перемещения плунжера в камере. Кроме того, соотношение диаметров плунжера и герметичной камеры определяет точность перемещения исполнительного органа. Цель изобретения - повышение точ ности перемещения исполнительного органа и увеличение рабочего хода. Поставленная цель достигается тем, что в механизме точных перемещений исполнительного органа, содер жащем заполненную рабочей средой герметичную камеру и входящий в нее вытеснитель, последний выполнен в виде гибкого длинномерного элемента наматьшаемого на введенные в механизм два приводных барабана, один и котЬрых установлен в герметичной камере, а другой - вне ее. Кроме того, механизм снабжен дополнительньм длинномерным элементом причем площади поперечного сечения длинномерных элементов различны, а направления намотки взаимнопротивоположны, при этом барабаны установлены с возможностью одновременного и синхронного вращения и осевого п ремещения по введенным в механизм н подвижным осям, выполненным в виде винта, шаг которого равен диаметру большего вытеснителя. На фиг. 1 изображена кинематическая схема механизма, общий случай; на фиг. 2 - то же, механизм для обеспечения высокоточных перемещений. Механизм, точных перемещений жестко закреплен на станине 1 шлифовального станка, по направляющим 2 которой перемещается исполнительный орган 3 (шпиндельная бабка). Собственно механизм состоит Из заполненной рабочей средой 4 (например, маслом или гйдропластом) герметичной камеры 5, которая жестко закреплена на направляющих 2. В герметичной камере 5 имеется подвижныйэлемент 6 подпружиненный поршень (фиг. 1) или мембрана (фиг. 2), центр которого контактирует с исполнительным органом 3. В рабочей полости камеры 5 размещен барабан 7 и намотанным на него вытеснителем 8, выполненным в виде тонкой (диаметром порядка ,3 мм) калиброванной проволоки. Второй конец 9 вытеснителя закреплен на барабане 10, расположенном вне камеры 5. Несто ввода вытеснителя 8 в камеру 5 выполнено в виде уплотнительного узла 11. Привод вращения барабанов 7 и 10 .осуществляется от электродвигателя 12 (фиг. 1) через кинематическую передачу 13-15 и управляемые муфты 16 и 17 или (фиг. 2) от шагового двигателя 18 и шестерни 19 и 20, именшдах возможность взаимных осевых перемещений. Контроль за фактической длиной введенного в камеру 5 вытеснителя 8 осзтцествляется мерными роликами 21 и 22 (фиг. 1), соединенными с управляющим блоком 23, который, в свою очередь, связан с электродвигателем 12 и управляемыми муфтами 16 и 17. На барабаны 7 и 10 (фиг. 2) намотан второй аналогичный вытеснитель калиброванная проволока 24, причем диаметр ее близок, на не равен, диаметру проволоки8.Однако,в этом случае, если один вытеснитель,например 8,намотан на барабаны по часовой стрелке, то второй вытеснитель, соответственно 24, намотан на них против часовой стрелки. При этом барабаны 7 и 10 целесообразно установить на закрепленных в корпусе камеры 5 осях 25 и 26, снабженных винтовой нарезкой, взаимодействующей с соответствующей резьбой на барабанах 7 и iO. Механизм работает :ледун)щим обра зом. При необходимости переместить ис полнительньй орган 3 включают электродвигатель 12 и замыкают одну из управляемых муфт 16 и 17. При этом вращение с электродвигателя 12 передается cooTBeTCTBjncMueMy барабан например 7, на который начинает наматываться вытеснитель 8, сматываясь с барабана 10. Объем внутреннего барабана 7 увеличивается пропорциональ но длине намотанной проволоки 8, что ведет к увеличению давления в камере 5 и к соответствующему перемещению подвижного элемента 6. При своем движении проволока 8 вращает мерные ролики 21 и 22, соединенные с управляняцим блоком 25, который, конт ролируя длину введенной проволоки 8, отключает двигатель 12 и размыкает муфту 16. Кроме того, в этом случае мерные ролики 21 и 22 вьшолняют роль направляющего устройства, обеспечивающего требуемую ориентацию 81 перемещаемого вытеснителя 8 относительно уплотнительного узла 11. Ориентацию вытеснителей 8 и 24 (фиг. 2) целесообразно осуществлять осевым смещением барабанов 7 и 10 посредством установки их на неподвижных резьбовых осях 25 , щаг резьбы в которых равен диаметру большего из вытеснителей 8 ипи 24. В этом случае необходимость в мерных роликах отпадает. Для обеспечения особо малых перемещений (фиг. 1) требуетс я проволока диаметром порядка d,b2-0,05 мм, что зачастую недопустимо из-за ее прочности. В таком случае использование механизма этой конструкции (фиг. 2) обеспечивает получение практически любых малых перемещений исполш тельного органа 3 с использованием двух проволок близкого диаметра, например ,d,0,35 мм, ,3MM. При этом привод вытеснителя практически не усложняется. Применение механизма позволит значительно повысить точность перемещения, увеличив при этом общую длину хода..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Бабка станка для отделочной обработки | 1985 |
|
SU1306699A1 |
| УСТРОЙСТВО для ПОДАЧИ ПРУТКОВ в ТОКАРНЫЙ АВТОМАТ | 1970 |
|
SU284572A1 |
| Токарный многошпиндельный станок | 1986 |
|
SU1351715A1 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| Затыловочный станок | 1982 |
|
SU1069977A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1992 |
|
RU2021092C1 |
| Устройство для групповой обработки поверхностей деталей шлифованием | 1980 |
|
SU891354A1 |
| Устройство для вывода гибкого длинномерного элемента контролирующей системы ядерного реактора | 1984 |
|
SU1269423A1 |
| АВТОМАТ ДЛЯ ШЛИФОВАНИЯ КАНАВОК И СПИНОК СВЕРЛ | 1971 |
|
SU295650A1 |

1. МЕХАНИЗМ ТОЧНЫХ ПЕРЕМЕЩЕНИЙ исполнительного органа, содержащий заполненную рабочей средой герметичную камеру и вход5Пций в нее вытеснитель, снабженный приводом, отличающийся тем, что, с целью повышения точности перемещения исполнительного органа и увеличения рабочего хода, вытеснитель выполнен в виде гибкого длинномерного элемента, наматьшаемого на введенные в механизм два приводных барабана, один из которых установлен в герметичной камере, а другой вне ее. 2. Механизм по п.1, о т л и чающийся тем, что он снабжен дополнительным длинномерным элементом, причем площади поперечного сечения длинномерных элементов различны, а направления намотки взаим нопротивоположны, при этом барабаны установлены с возможностью одновременного и синхронного вращения и осевого перемещения по введенным в механизм неподвижным осям, выполненньм в виде винта, шаг Которого равен диаметру большего вытеснителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU207766A1 | |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
