ел «
о
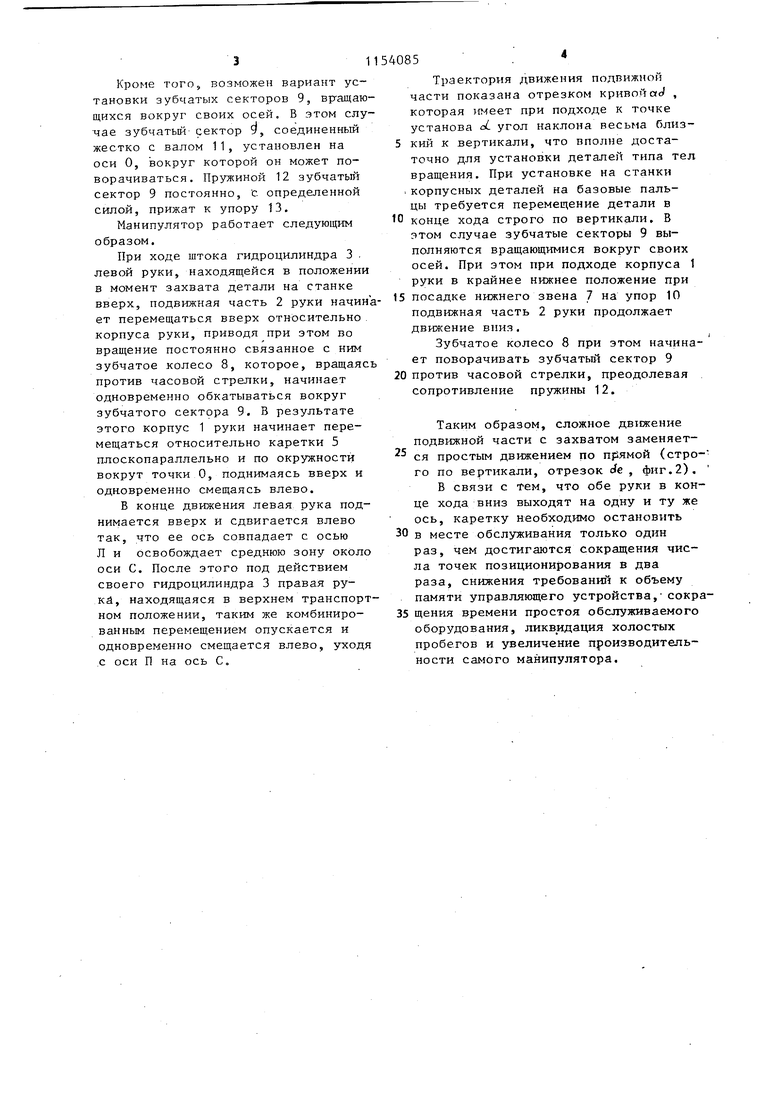
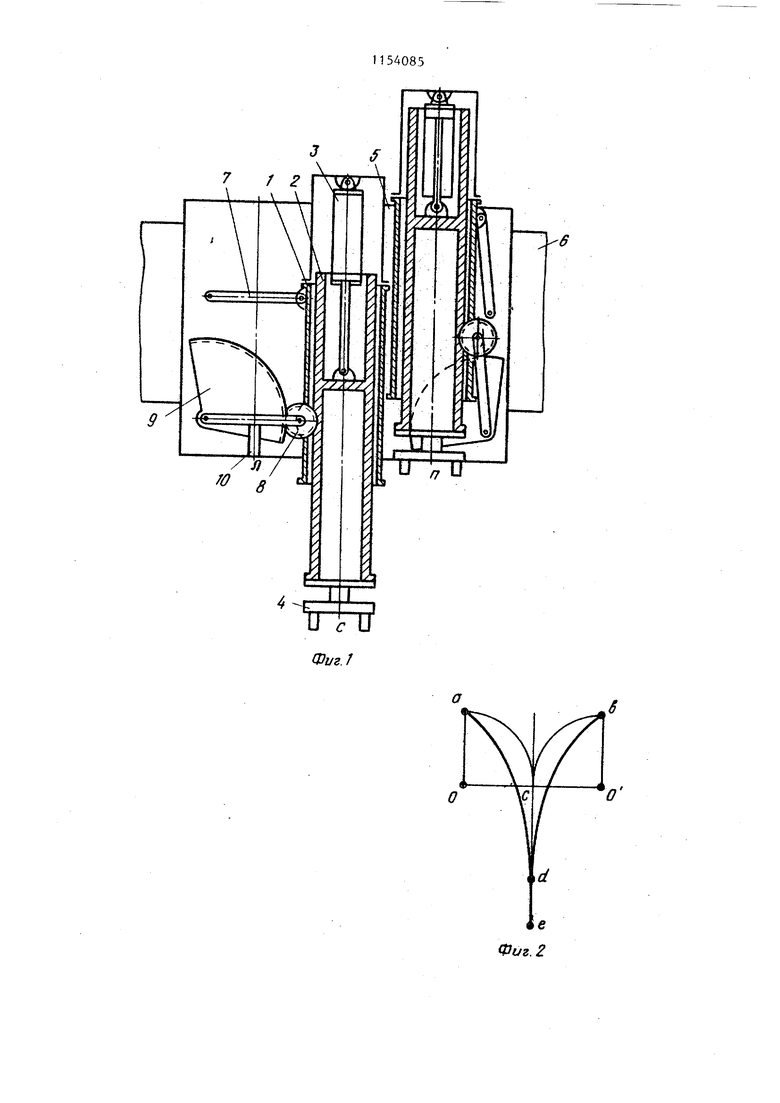
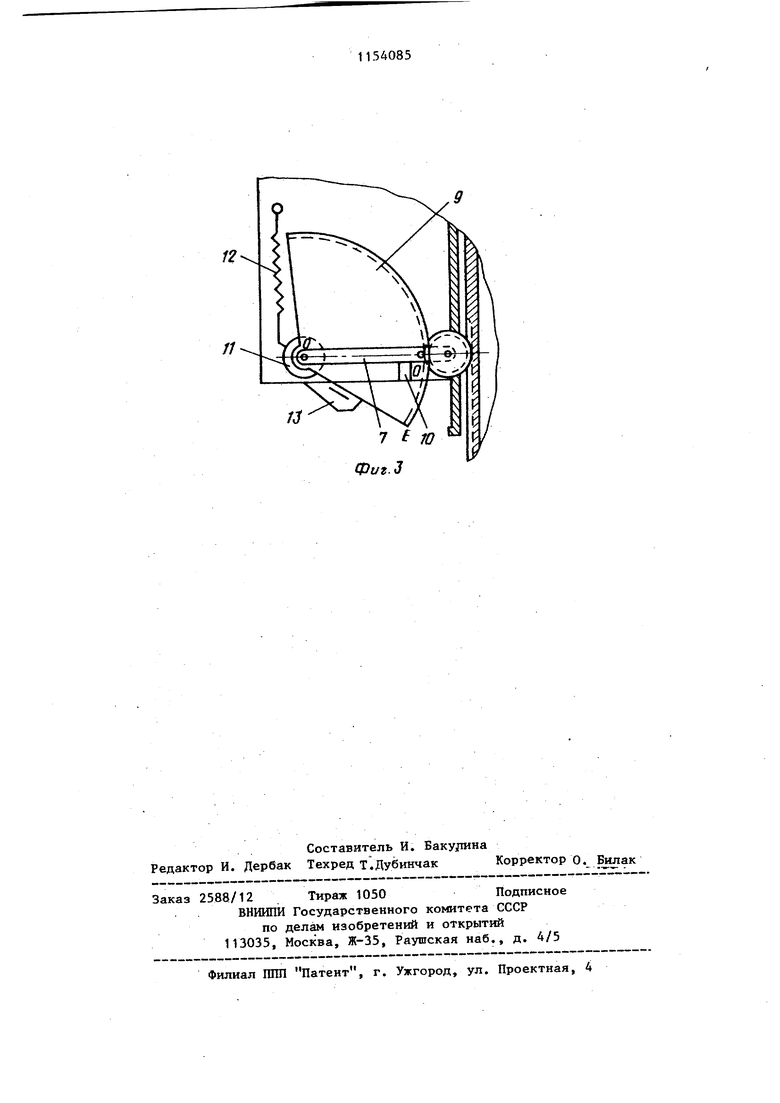
00 ел Изобретение относится к автомати зации загрузки и разгрузки технолог ческого оборудования, например мета лореж тчих станков, посредством авто матических двуруких манипуляторов, ПОЗВОЛЯЮ1ЦИХ по сравнению с одноруки ми машинами значительно сократить п стои обслуживаемых манипулятором станков и увеличить их число. Известен ма1гипулятор, содержащий подвижную каретку, которая перемеща ется по порталу, подвешенному над , обслуживаемьми станками, и расположенные на пей в плоскости, параллел ной оси перемещения каретки, руки с захватами для деталей, выполненные в виде корпусов и установленных в н подвижных частей, соеди)енных прив дами, и упоры С| Однако в известном манипуляторе месте обслуживания станка необходимо иметь две точки останова тяжелой каретки вследствие поочередного под вода к месту загрузки то одной, то другой руки манипулятора, приходится два-кдытормозить и разгонять каретку. Сн1тасзется надежность работы манипулятора, усложняется система управления. Время снятия обработанной детали и установки новой,, т.е. простой под загрузкой станка, увеличивается на время дви :еиия каретки при смене рук5 которое, вследствие небольшой скорости ее перемещения, вызванной большой массой, составляет 15-20% от всего цикла обслуживания. Снижается произво,дительность ocffOBHoro технохгоп-гческого оборудования. Из-за того, что свободная рука на манипуляторе после каждого обслу живания меняет свое место, на каждом втором оослзокиваемом станке появляется необходимость холостых пробегов, так как вначале к станку подается свободная, задняя по ходу движения рука, а затем каретку приходится перемещать назад по ходу движения при подводе передней руки, потом опять проходить эту часть пути в прямом направлении при перемещении к следующему объекту обслуживания. Таким образом, снижается производительность самого манипулятора и, следовательно, число обслуживаемого оборудования, Цель изобретения - повьшение производительности манипулятора. Указанная цель достигается тем что манипулятор, содержащий подвижную каретку и расположенные я плоскости, параллельной оси ее перемещения, руки с захватами для деталей, выполненные в виде корпусов и установленных в них ПОДВИЖПЕЛХ частей, соединенных приводами, и упоры, снабжен звеньями одинаковой длины, шарнирно закрепленными параллельно один другому на корпусе каждой руки и на каретке, и зубчато-реечными передачами, выполненными каждая в виде зубчатого колеса, установленного на оси сочленения одного из звеньев с корпусом руки, зубчатого сектора, установленного на оси сочленения зтого звена с кареткой, и рейки, закрепленной на подвижной части корпуса, при этом зубчатое колесо находится в зацеплении с рейкой и с зубчатым сектором. При этом зубчатые секторы установлены с возможностью поворота вокруг своих осей. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - траектория движения захватов; на фиг. 3 - вариант исполнения зубчатого сектора. 1анипулятор имеет две выдвижные руки, состоящие из корпусов 1, подвижных частей 2, привода 3, например, гидроцилиндра и захватов 4, закрепленных на подвижных частях руки, и зубчато-реечный механизм. Корпуса рук закреплены на каретке 5, подвижной относительно портала 6, шарнирно посредством двух параллельных звеньев 7 одинаковой длины. На оси нижнего звена подвески, примыкающее к корпусу 1 руки, установлено зубчатое колесо 8 зубчатореечного механизма, которое с одной стороны входит в зацепление с рейкой этого механизма, закрепленной на подвижной части 2 руки, а с другой стороны - с зубчатым сектором 9 зубчато-реечного механизма, закрепленным на каретке неподвижно таким образом, что его центр совпадает с осью подвески нижнего звена. Ход руки ограничен упором 10, на который садится нижнее звено 7, Все элементы конструкции второй руки зеркально симметричны элементам первой относительно общей оси, занимаемой каждой рукой в крайнем вьщвинутом положении. 3 Кроме того, возможен вариант установки зубчатых секторов 9, вр-ащаю щихся вокруг своих осей, В этом слу чае зубчатый сектор У, соединенный жестко с валом 11, установлен на оси О, вокруг которой он может поворачиваться. Пружиной 12 зубчатьп сектор 9 постоянно, с определенной силой, прижат к упору 13, Манипулятор работает следующим образом. При ходе штока гидроцилиндра 3 . левой руки, находящейся в положении в момент захвата детали на станке вверх, подвижная часть 2 руки начин ет перемещаться вверх относительно корпуса руки, приводя при этом во вращение постоянно связанное с ним зубчатое колесо 8, которое, вращаяс против часовой стрелки, начинает одновременно обкатываться вокруг зубчатого сектора 9, В результате этого корпус 1 руки начинает перемещаться относительно каретки 5 плоскопараллельно и по окружности вокрут точки О, поднимаясь вверх и одновременно смещаясь влево. В конце движения левая рука поднимается вверх и сдвигается влево так, что ее ось совпадает с осью Л и освобождает среднюю зону около оси С. После этого под действием своего гидроцилиндра 3 правая руки, находящаяся в верхнем транспорт ном положении, таким же комбинированным перемещением опускается и одновременно смещается влево, уходя с оси П на ось С. 5. Траектория движения подвижной части показана отрезком кривой ас/ , которая имеет при подходе к точке установа cL угол наклона весьма близкий к вертикали, что вполне достаточно для установки деталей типа тел вращения. При установке на станки корпусных деталей на базовые пальцы требуется перемещение детали в конце хода строго по вертикали, В этом случае зубчатые секторы 9 выполняются вращающимися вокруг своих осей. При этом при подходе корпуса 1 руки в крайнее нижнее положение при посадке нижнего звена 7 на упор 10 подвижная часть 2 руки продолжает движение вниз. Зубчатое колесо 8 при этом начинает поворачивать зубчатый сектор 9 против часовой стрелки, преодолевая сопротивление пружины 12, Таким образом, сложное движение подвижной части с захватом заменяется простым движением по п}3ямой (стро-го по вертикали, отрезок cfe , фиг,2). В связи с тем, что обе руки в конце хода вниз выходят на одну и ту же ось, каретку необходимо остановить в месте обслуживания только один раз, чем достигаются сокращения числа точек позиционирования в два раза, снижения требований к объему памяти управляющего устройства, сокращения времени простоя обслуживаемого оборудования, ликвидация холостых пробегов и увеличение производительности самого манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Манипулятор | 1985 |
|
SU1265040A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| Устройство автоматической смены инструмента | 1982 |
|
SU1085752A1 |
1. МАНИПУЛЯТОР, содержащий подвижную каретку и расположенные в плоскости, параллельной оси ее перемещения, руки с захватами для деталей, выполненные в виде корпусов и установленных в них подвижных частей, соединенных приводами, и упоры, отличающийс я тем, что, с целью повышения его производитель8€ € ШЗ,т V ..--.Ч :-. V . П Ш515: ч-5ЛА ности, он снабжен звеньями одинаковой длины, шарнирно закрепленными параллельно один другому на корпусе каждой руки и на -каретке, и зубчатореечными передачами, выполненными каждая в виде зубчатого колеса, установленного на оси сочленения одного из звеньев с корпусом руки, зубчатого сектора, установленного на оси сочленения этого звена с кареткой, и рейки, закрепленной на подвижной части корпуса, при этом зубчатое колесо находится в зацеплении с рейкой и с зубчатым сектором. 2. Манипулятор по п.1, о т л и ч ающ и и с я тем, что зубчатые секторы установлены с возможностью (Л поворота вокруг своих осей.
12
13
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТООПЕРАТОР^ i.;0 | 1972 |
|
SU424689A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
