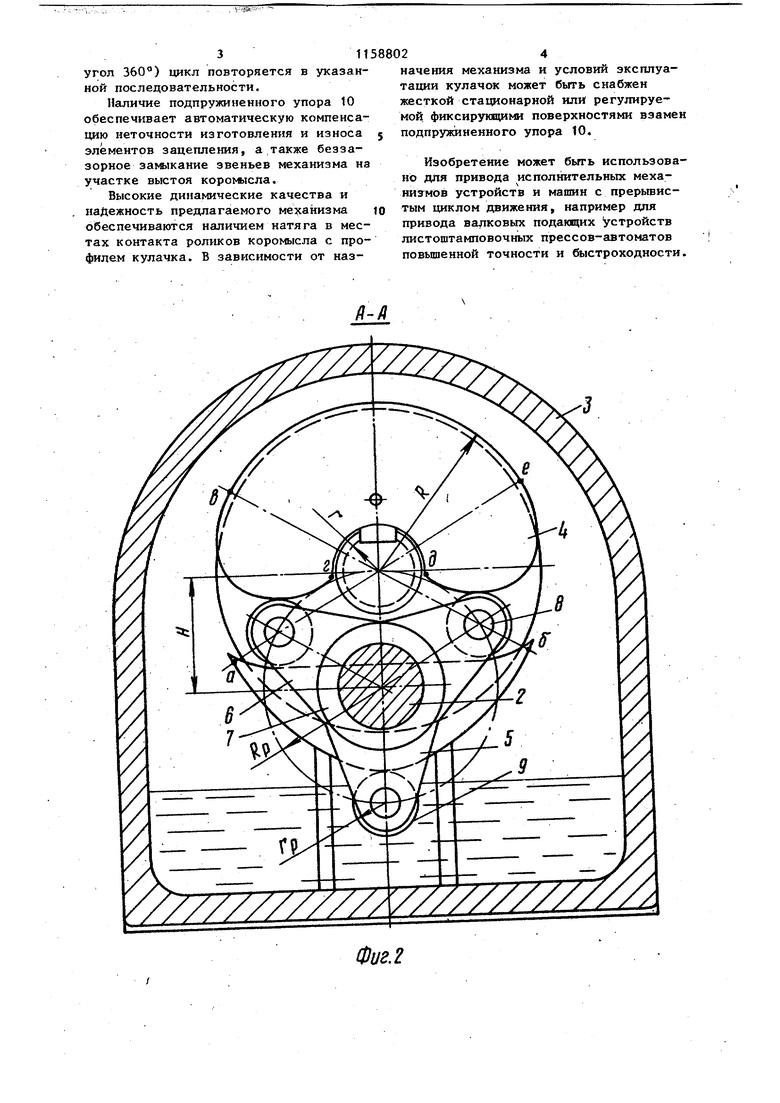
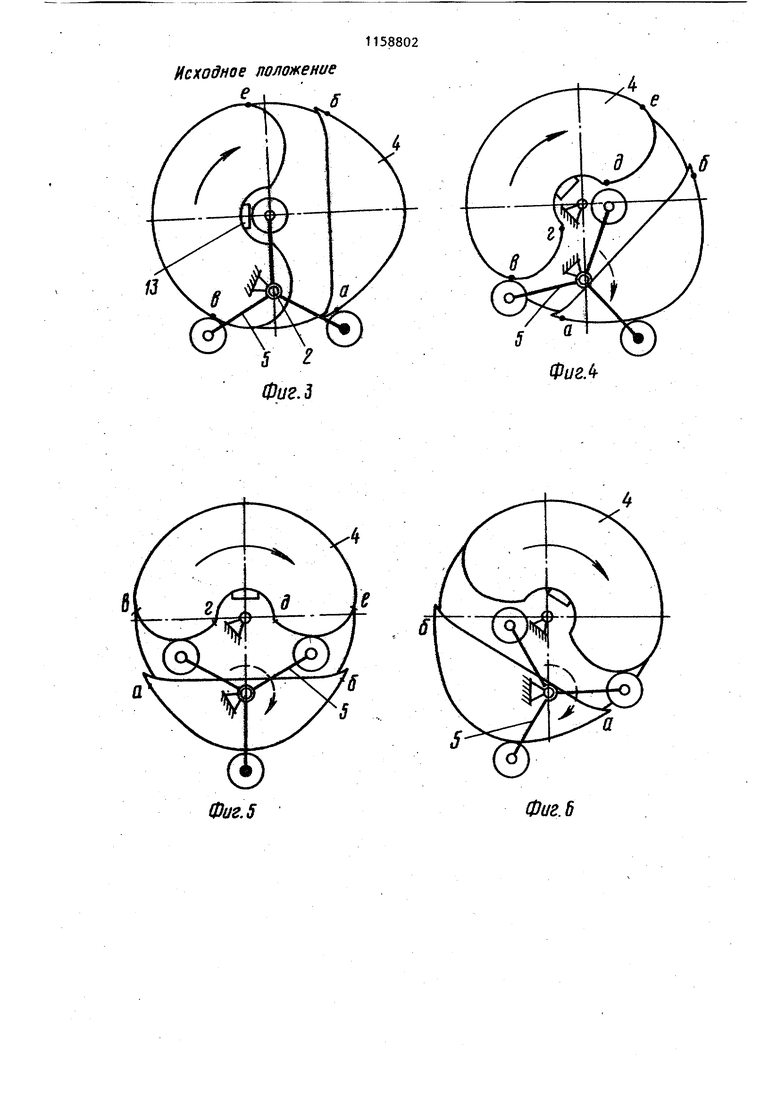
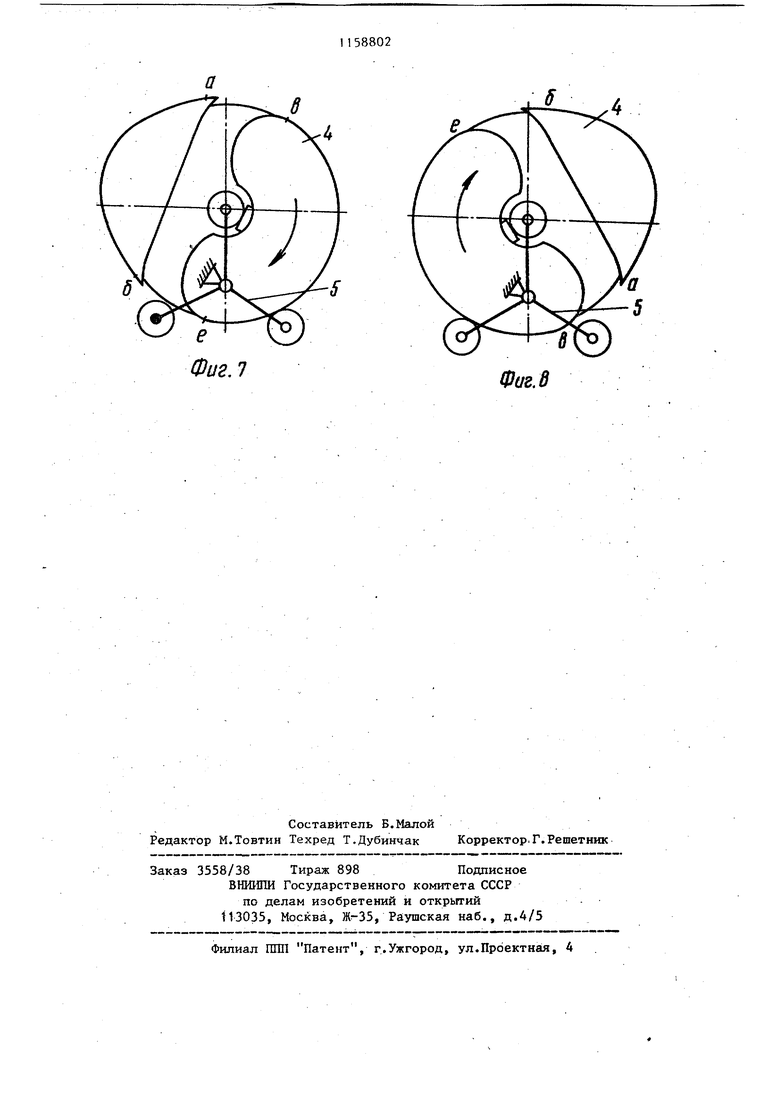
1115 Изобретение относится к машиностроению и может быть использовано для привода исполнительных механизмо машин с прерывистым циклом движения. Известен механизм прерывистого вращения и фиксации, содержащий ведущий вал, плоский кулачок t рабочим профилем и внутренней расточкой, с которыми взаимодействуют четыре ролика коромысла ведомого вала, обеспечивая за один поворот кулачка по,ворот коромысла на угол 90° и жесткую фиксацию ведомого вала fl}. Наиболее близким по технической сущности и достигаемому результату является механизм прерывистого вращения и фиксации ведомого звена, содержащий ведущий вал, размещенный на нем плоский кулачок с рабочим профилем и фиксирующей поверхностью, ведомый вал, жестко связанное с ним коро мысло, несущее по крайней мере три ролика, взаимодействующие с кулачком 2.. Недостатками известных механизмов являются большие габариты, а также невысокая надежность вследствие низких динамических свойств. Цель изобретения - повьшение надежности и уменьшение габаритов Mexa Цель достигается тем, что в механизме прерывистого вращения и фиксации ведомого звена, содержащем ведущий вал, размещенный на нем плоский кулачок с рабочим профилем и фиксирующей поверхностью, ведомый вал, жестко связанное с ним кopo влcлo,несущее по крайней мере три ролика. взаимодействунщие с кулачком, радиус расположения роликов коромысла равен межцентровому расстоянию между валами, а фиксирующая поверхность расположена относительно оси вращения кулачка на расстоянии, равном радиусу коромысла. На фиг.1 изображен механизм прерывистого вращения и фиксации ведомого звена, продольный разрез; на фиг.2 разрез А-А на фиг.г на фиг.3-8 схемы взаимного положения кулачка и коромысла на различных стадиях поворота в течение цикла. Механизм прерьгоистого вращения и фиксации ведомого звена содерзшт ведущий 1 и ведомый 2 валы, размещенные в корпусе 3. На ведущем валу 1 жестко закреплен плоский кулачок 4, а на 22 ведомом .валу 2 жестко закреплено KojpoМзюло 5, выполненное в виде трех равнорасположенных по окружности рычагов 6, жестко соединенных между собой общей ступицей 7, Каждый из рычагов снабжен установленным на оси 8 роликом 9. Радиус расположения роликов 9 коро№1сла 5 RP равен расстоянию Н между осями валов 1 и 2 механизма. В расточке кулачка А размещены упор 10, пружина 11 и штифт 12, а расстояние М (фиг.1) между осью кулачка и фиксирующей поверхностью 13 упора 10 равно радиусу гр ролика 9 коромысла 5. Рабочий профиль кулачка 4 состоит из трех криволинейных участков а- , 6-г и д-е и двух участков В-е и z.-j с постоянными радиусами R и г. Механизм работает следующим образом. В исходном положении, например в . момент окончания выстоя коромысла 5 (фиг.З), два ролика взаимодействуют точками а и i профиля кулачка, а третий - ,с упором 10. При повороте кулачка 4 по часовой стрелке на угол в пределах 0-90° профиль O.-J взаиподействует с сопряженным с ним роликом и осуществляет поворот коромысла g (фиг.4), при этом второй ролик обкатывается без зазора по участку профи.ця В-г. , обеспечивая геометрическое замыкание звеньев механизма. После поворота кулачка 4 на угол 90(фиг.5) в контакте с различными участка- ми профиля кулачка находятся все три ролика коромысла 5. При вращении уланка 4 на участке 90-180 поворот «оромысла осуществляется посредством воздействия профиля д- на сопряжечньй с ним ролик, а геометрическое замыкание звеньев механизма обеспечивается а-, профиля (фиг.6). В процессе поворота кулачка 4 на угол в пределах 180-360 (фиг. 7 и 8) осуществляется высотой ведомого вала 2 за счет обкатки роликов 9 коромысла 5 по участку профиля о-с с постоянным радиусом R, а геометрическое замыкание звеньев механизма на участке вьютоя коромысла осуществляется взаимодействием упора 10 с третьим роликом, ось которого в период выстоя коромысла.совмещена с осью ведущего вала кулачка 4. После окончания процесса выстоя (повороту кулачка на угол 360°) цикл повторяется в указанной последовательности. Наличие подпружиненного упора 10 обеспечивает автоматическую компенсацию неточности изготовления и износа элементов зацепления, а также беззазорное зашкание звеньев механизма на участке выстоя коро1 1сла. Высокие динамические качества и надежность предлагаемого механизма обеспечиваются наличием натяга в местах контакта роликов коромысла с профилем кулачка. В зависимости от наз12 начения механизма и условий эксплуатации кулачок может быть снабжен жесткой стационарной или регулируемой фиксирующими поверхностями взамен подпружиненного упора 10. Изобретение может бьп-ь использовано для привода исполнительных механиз мов устройств и машин с прерьшистым циклом движения, например для привода валковых подающих устройств листоштамповочтпс прессов-автоматов повышенной точности и быстроходности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулачковый механизм | 1988 |
|
SU1580097A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| Поворотное устройство | 1983 |
|
SU1128032A2 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Кулачково-роликовый механизм для преобразования непрерывного вращения в прерывистое | 1978 |
|
SU739295A1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2005 |
|
RU2278804C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Поворотное устройство | 1981 |
|
SU998789A1 |
МЕХАНИЗМ ПРЕРЬШИСТОГО. ВРАЩЕНИЯ И ФИКСАОДИ ВЕДОМОГО ЗВЕНА, содержащий ведущий вал, размещенный на нем плоский кулачок с рабочим профилем и фиксирующей поверхностью, ведомьш вал, жестко связанное с ним коромысло, несущее по крайней мере три ролика, взаимодействующие с кулачком, отличающийся тем, что, с целью уменьшения габаритов и повьшения надежности, радиус расположения роликов коромысла равен межцентровому расстоянию между валами, а фиксирующая поверхность расположена относительно оси вращения кулачка на расстоянии, равном радиусу ролика коромысла.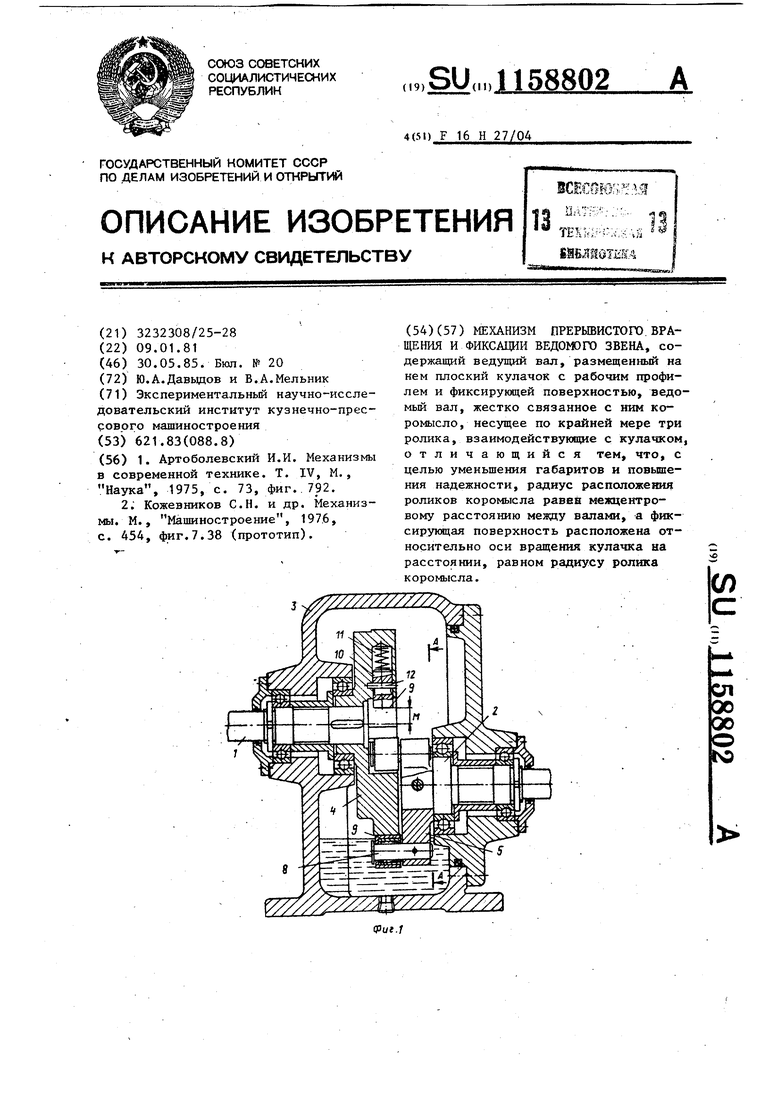
Фиг.г
Исходное положение
Фиг А
Фиг.5
Фиг. 6
в
Фиг. 1
Фиг. 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Меха в современной технике | |||
| Т | |||
| IV, М Наука, 1975, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кожевников С.Н | |||
| и др | |||
| Мех мы | |||
| М | |||
| , Машиностроение, 1976, с | |||
| Автоматический прибор для регистрирования числа замыканий | 1922 |
|
SU454A1 |
