вертые вкоды которых соединены с вторь1ми йходньмя шинами, а выходы с соответствующими выходньвда шинами, третий вход первого делителя импульсов подключен к входной шине, четвертые входы второго и третьего делителей импульсов также подключены к срответствуюгцим входным шинам.
2. Интерполятор по п. 1, о т л ичающийся тем, что блок управления содержит первый элемент ИЛИ, первьЙ RS-триггер, .последовательно соединенные второй элемент ИЛИ, второй RS-триггер, первый элемент И и первый регистр сдвига, а также по следовательно соединенные генератор опорной частоты, второй элемент И, третий элемент И, второй регистр сдвига, третий RS-триггер, четвертый элемент И и третий регистр сдвига, первый выход которого через третий элемент ИЛИ соединен с десятым выходом блока управления, второй выход через четвертый элемент ИЛИ - с седьмым выходом блока управления, третий выход - через пятый элемент ИЛИ с пятым вькояом блока управления, первьй вход блока управления соединен с первьм входом второго элемента И и с R-входом третьего RS-триггера и через первый элемент ИЛИ соединен с R-входом первого RS-триггера, выход которого подключен к второму входу, второго элемента И, инверсный выход третьего RS-триггера соединен с вторым входом третьего элемента И, подключенного третьим входом к инверсному выходу второго RS-триггера, S-вход которо.го соединен с вторым входом первого регистра сдвига, третий выход которого черезшестой элемент ИЛИ подключен к шестому выхоДу блока управления, четвертый выход к второму входу блока управления, пятый вьосод - к второму входу третьего элемента ИЛИ, шестой выход к седьмому выходу блока управления через «седьмой элемент ИЛИ - к девятому выходу блока управления, а через четвертый элемент ИЛИ - к одинадцатому выходу блока управления, седьмой выход первого регистра сдвига - к второму входу пятого элемента ИЛИ, а восьмой выход - к третьему входу пятого элемента ИЛИ и к восьмому входу блока управления, первый выход второго регистра сдвига через восьмой элемент ИЛИ соединен с первым выходом блока управления , второй выход - с двенадцатым выходом блока управления, третий выход - с четвертьм выходом, а четвертый выход - с первым входом девятого элемента И, выход которого подключен к второму входу второго элемента ИЛИ, второй вход девятого элемента И соединен с вторым входом блока управления и Через элемент НЕ - с первым входом десятого элемента И второй вход которого соединен с первым входом девя того элемента И, а выход - с вторым входом шестого элемента ИЛИ,

| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1988 |
|
SU1541557A1 |
| Функциональный преобразователь | 1991 |
|
SU1807498A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Устройство для извлечения квадратного корня | 1988 |
|
SU1569827A1 |
| Устройство для извлечения квадратного корня | 1989 |
|
SU1658150A2 |
| Устройство для коррекции эквидистанты | 1991 |
|
SU1803904A1 |
| Функциональный преобразователь | 1988 |
|
SU1541629A1 |
| ИНТЕРПОЛЯТОР | 1997 |
|
RU2127903C1 |
| Параболический интерполятор | 1984 |
|
SU1231512A1 |
| ИНТЕРПОЛЯТОР | 1997 |
|
RU2127902C1 |
ПАРАБОЛИЧЕСКИЙ ИНТЕРПОЛЯТОР , содержащий блок управления, четыре регистра,- выход первого ре- гистра соединен с первьм входом счетчика импульсов, первый, второй и третий импульсов, .о ти ч а to щ и и с я тем, 4fo, с целью повышения точности и pacumрения функциональных возможностей путем воспроизведения кривых, смещенных и поверйутьпс относительно осей координат, в него введены пять сумматоровj первый и второй триггеры, выходы 1{6торых соединены с первым и вторым входами бло.ка управления соответственно, первый выход которого подключен к первому входу первого делителя импульсов, второй выход - к второму входу первого, делителя импульсов, первым входам первого, второго, третьего и четвертого регистров сдвига первым входам второго и третьего 1С 1елителей импульсов, к первому входу первого триггера,, к первым входам первого, второго, третьего и четвёртого сумматоров, третий выход - к вторым входам второго и третьего делит ей импульсов четвертый выход - к первому входу пятого сумматора, пятый выход к второму входу счетчи1 а. имйульсов, шестой вьпсод - к вторым входам первого регистра сдвига и пятого сумматора, седьмой выход к третьему входу счетчика импульсов, выход которого соединен с вторым входом первого триггера, выход первого делителя импульсов соединен с третьим входом пятого сумматора, шестой вход которого соединен с выходом второго регистра сдвига, а выход - с вторым входом второго триггера, восьмой выход блока управления соединен с вторыми входагш третьего и четвертого регистров сдвига, девятый выход - с третьими входами второго и третьего делитео: лей импульсов, десятый выход - с о со вторыми входами второго и четвертого сумматоров, одиннадцатый выход с .втЬрь1ми входами пгрвого .И третьего сумматоров, двенадцатый выход подключен к третьим входам третьего и четвертого регистров сдвига, четвертые входы которых соединены с входньа ш шинами, а выходы - собтветствеино с третьики входами второго и четвертого сумматоров, пятые входы которых подключены к выходам второго и третьего делителей импульсов соответственно, а выходы к вьпсрдным шинам и к третьим входам первого и третьего сумматбров, чет
. Изобретение относится к автоматике и вычислительной технике и может быть использовано в качестве специализированного вычислителя в системах автоматического контроля и управления, в частности,, в станках с ЧПУ, системах управления графопостроителями.
Известно устройство для воспроизведения квадратичных функций, содержащее генератор импульсов, ключ, схему сравнения кодов, счетчик, блоки элементов И, элементы И, элементы ШШ, двоичный умножитель, сумматор, триггер .l J.
Недостатком устройства является ограниченные функциональные возможности, что обуславливается узким классом воспроизводимых функций, причем, проходящих через начало системы координат.
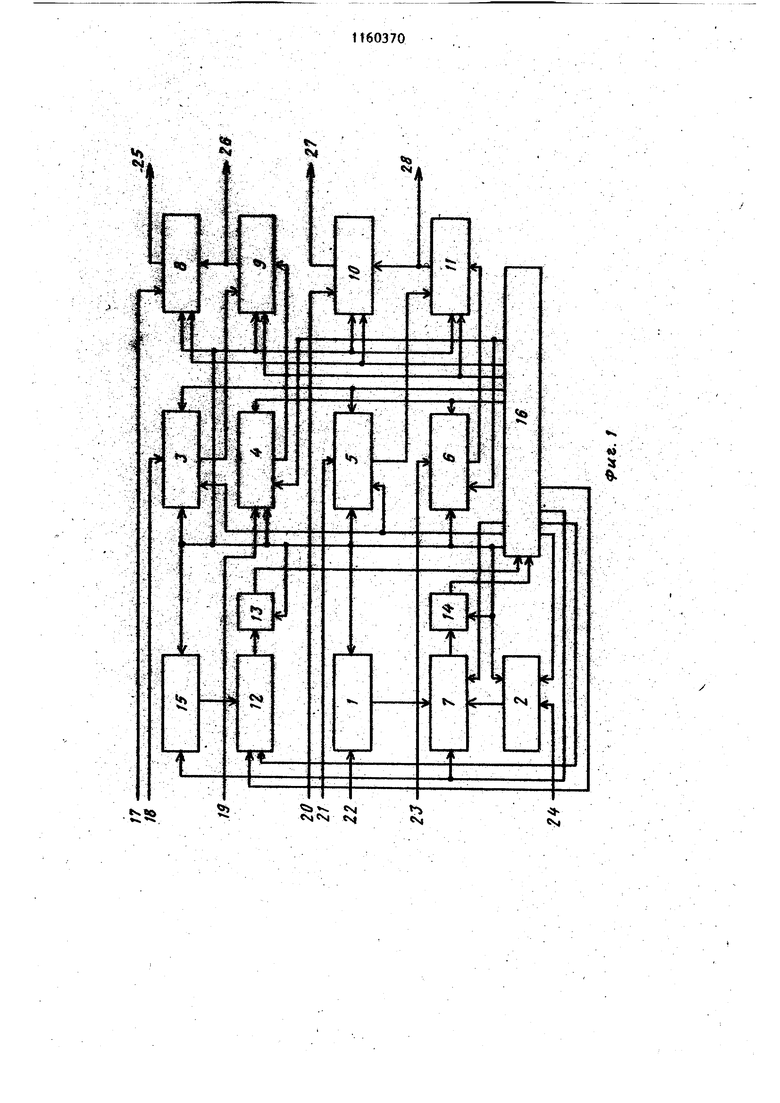
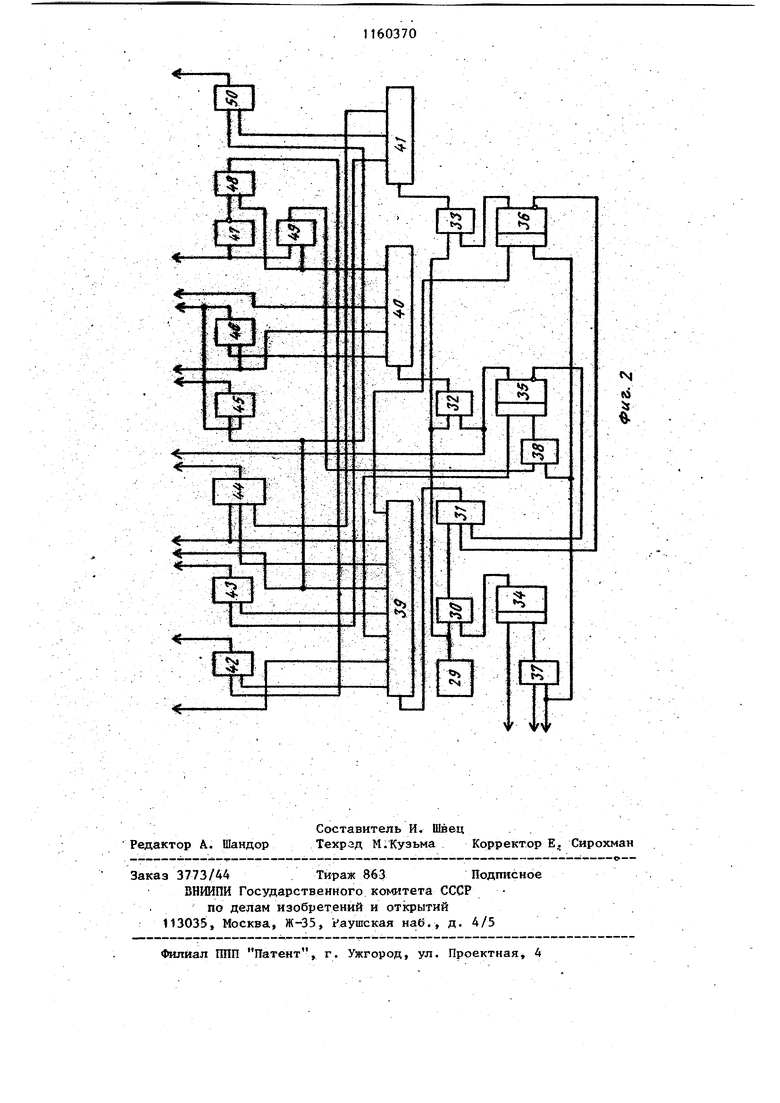
Наиболее близким к изобретению по технической сущности являются параболический интерполятор на цифровых интеграторах 2. Недостатком известного устройст ва является низкая точность интерполироваяия так как даже пЬи точном задании исходных данных в процессе отработки в этой схеме воэникаёт на1Еаш 1вающаяся погрешность за счет интегрирования, что существенным образом ограничивает област применения данного устройства. Кроме того, )5анный параболический интерйопятор воспроизводит кри вые , пррходяв ие через начало системы Координат, что ограничивает класс воспроизводимых функций, а следовательно,, и технические возмож ности устройства, Целыр изобретения является повышение точности и расширение функцио нальнь&с возмоясностей путем воспроизведения кривых смещённых и повёр нзггых относительно осей координат. Поставленная цель достигается тем, что в параболический интерполятор , содержаадй блок управления,, четыре регистра, выход первого регистра соединен с первым т&ходом счетчика импульсов, первый, второй и третий делители импульсов, введены пять сумматоров, первый и второй триггеры, выходы которых соединены с первым и вторым входами блока управления соответственно, первый выход которого подключен к первому входу первого делителя импульсов, второй выход - к второму. входу первого делителя импульсов первым входам первого, второго, третьего и четвертого регистров сдв га , первому входу второго и третьего делителей импульсс, к первому входу первого триггера, к первым входам первого, второго, третьего и четвертого су Ф1аторов, третий выход - к вторым входам второго и третьего делителей импульсов, четвертый-выход - к первому входу пято го сумматора, пятый вьпсод - к второму входу счетчика импульсов, шестой выход - к вторым входам первого регистра сдвига и пятого сумматора седьмой выход - к третьему входу счетчика импульсов, вьпсод которого соединен с вторым входом первого триггера, выход первого делителя импульсов соединен с третьим входом пятого сумматора, шестой вход которого соединен с выходом второго ре1гистра сдвига, а выход - с вторым входом второго тригг(ера восьмой выход блока управления соединен с вторыми входами третьего и четвертого регистров сдвига, девятый выход - с третьими входами второго и третьего АЭлителейи1И1ульсов, десятый выход -с вторыми входами второго и четвёртого сумматоров, одиннадцатый вьтход - с вторыми входами первого ятретьегб сумматоров, двенадцатый выход подключён к третьим входам третьего и четвертого регистров сдвига, четвертые входы которых соединены с входными , а выходы - соответственно с третьими входами второго и четвертого сумматоров, пятые входы которых подключены к выходам второго и третьего делителей импульсов соответственно, а выходы - к выходньм шинам и к третьим входам первого и третьего сумматоров, четвертые входы которых соединены с вторыми входными щинами, а выходы - с соответствуИщими выходными шинами, третий вход первого делителя импульсов подключен к входной шине, четвертые входы второго и третьего делителей импульсов также подключены к соответствующим входным шинам. Кроме того, блок управления содержит первый элемент ИЛИ, первый RSтриггер последовательно соединенные второй элемент ИЛИ, второй RS-триГгер, первый элемент И и первый регистр сдвига, а также последовательно соединенные генератор опорной частоты, второй элемент И, третий элемент И, второй регистр сдвига, третий RS-триггер, четвертый элемент И и третий регистр сдвига, первый выход которого через третий элемент ИЛИ соединен с десятьм выходом блока управления, второй выход через четвертый элемент ИЛИ - с седьмым выходом блока управления, третий выход - через пятый элемент ИЛИ с пятым выходом блока управления, первый вход блока управления соединен с первьцч входом второго элемента И и с R-вхоДом третьего RS-триггера и через первый элемент ИЛИ соединен с R- входом первого RS-триггера, выход которого подключен к второму входу второго элемента И, инверсный выход третьего RS-триггера соединен с вторым входом третьего элемента И, подключенного третьим входом к инверсному выходу второго RS-триггера, S-вход которого соединен с вторым входом первого регистра сдвига, третий выход которого через шестой элемент ИЛИ подключен к шестому вькоду блока управления, чет.вертый выход - к второму входу блока управления, пятый выход к седьмому выходу блока ,управления через седьмой элемент РШИ - к девятому выходу блока управления, а через четвертый элемент ИЛИ - к одиннадцатому выходу блока управления седьмой выход первого регистра сдвига - к второму входу пя того элемента ИЛИ, а восьмой выход - к третьему входу пятого элемента ида.и к восьмому выходу блока управления „ первый выход второго регистра сдвига через восьмой элемент ИЛИ соединен с первым выходом блока управления, второй выход - с двенадцатым вькодом блока управления, третий выход с четвертым выходом, а четвертый выход - с первым входом девятого эле мента И, выход которого подключен к второму входу второго элемента ИЛИ, второй вход девятого элемента И соеданен с вторым входом блока управления я через элемент НЕ с первым входом десятого элемента И, второй вход которого соединен с первым входом девятого элемента И, а выход - с вторым входом шесто го эпемента ИЛИ. На фиг. 1 изображена функциональная схема параболического интерполятора, на фиг. 2 - блок упра ления. Параболический интерполятор сод жит 1 сдвига, делитесь 2, литель 3, регистр 4 сдвига, делите 5, регистр 6 сдвига, сумматоры 7-1 счетчик 12, триггеры 13-14, регист 15 сдвига, блок 16 управления, вхо ные шины 17, 18, 19, 20, 21, 22, 23, 24 соответственно величин Р , х Sy Piv 3 выходные шины 25, 26, 27, 28 соответ ственно величин Р,.дР, APm,. Блок управления содержит генера тор 29 импульсов опорной частоты, элементы И 30-33, RS-триггеры 34-3 элементы ИЛИ 37 и 38, три регистра сдвига 39-41, элементы ИЛИ 42-47, элементы И 48, 49 и элемент ИЛИ 50. Работа, параболического интерполятора основана на реализации вектор ного уравнения параболы с некоторым параметром Р а . Вт -к с О iT:S 1 , (1) где Р, , при Т О Р Ра, при Т 1/2, РЗ, при Т 1. Векторы а, b и с определяются в со-i ответствии с выражениями : i 2Pi - 4р2 + 2Pj b -ЗР + 4 - РЗ Р-. .(2) Предположим, Р(Т) - точка на параболе, соответствующая величине Т, так определено уравнением (1). Тогда точка на параболе, соответствующая величине параметра Т, увеличенного йа дТ, является точкой, задаваемой вектором Р(Т + лТ). Линейное движение из Р(Т) в Р(Т 4- дТ) в этом случае определится как ДР Р(Т - ДТ) - Р(Т), (3) Р(Т ЛТ) Р(Т) + 2аТ лТ + + а ЬдТ . Подставляя последнее вьтражение в (3), получим дР (2ТдТ:+дТ)а + дТЬ (4) Произведя -еще одну подстановку, получим ,. 2 д. . (5) Из анализа (5) следует, что ДР независимо от Т, что является ключем к быстрому вычислению последовательности точек параболы. )Эчевидно, что. если лТ - фиксированная величина, зависимая от Требований по точности, а дРх,определяется в соответствии с (4) при Т 0, то последовательность ЛР получается повторением дополнения константы 4 к предшествующему, значению ДР (аналогично Р(Т) получаются дополнением к предшествующему значению Р(Т) значения дР). Таким образом, координаты вершин ломаной, аппроксимирующей параболу и приращения по координатам определяется как -ь ЛР«, Рт. P«v, ЛР ) ГП где т 1, 2, 3, ..., . Значение N определяется из неравенства4 4|ё
7
где Iё I - модуль требуемой точност аппроксимации, |а1 1 наибольшая
составляющая а|- т1 второй состав- t 1 I ляющей а |+|jвторой составляющей
1 J 1I.
третьей составляющей а
(8).
Порядок вычислений координат точек параболы следующий:
Вычисляются а и Б из выражения (2); вычисление приближенного |а I из (8)i подбор N, соответствующего неравенству (7) вычисление приращения второго порядка Д Р из (5), при дТ 1/2, вычисление
приращения первого порядка 4Р из (4), с Т О и 4Т -,
После данных шагов вычисления точек параболы и приращений первого порядка ведутся в соответствии с (6).
Параболический интерполятор работает следующим образом.
Сигналом Пуск, поступающим на S-вход триггера 34 блока 16 управления, триггер 34 взводится и открывает элемент И 30, через который начинают проходить импульсы с выхода опорного генератора 29. Элемент И 31 по первому и третьему входам открыт потенциалами с инверсных выходов триггеров 35 и 36, поэтому импульсы опорной частоты проходят через элемент И 31 и поступают на вход первого регистра 39 сдвига. Первый импульс, поступивший на вход регистра 39.сдвига, возбуждает первый его вход. Данный сигнал через элемент ИЛИ 42 поступает на 11 выход блока 16 управления и обеспечивает установку в нулевое состояние сумматора 7. Кроме тог6 импульс поступает на управляющий вход регистра 15 (что в данном случае не нарушает режима работы интерполятора).
Второй импульс, пришедший на вход регистра 39 сдвига, возбуждает второй его выход. Данный сигнал поступает на второй выход блока 16 управления и обеспечивает занесение значений и Р( (координаты начальной точки кривой) по шинам 17 и 20 в сумматоры 8 и 10, кроме того, сумматоры 9 и 11 обнуляются, в регистр 15 заносится код двойки, регистр 1 и делитель 2 по 1аинам
60370 8
22 и 24 принимают соответственно значения |а| и -4|ё1 которые были определены из уравнений (8) и (7) соответственно), делители 3 и 5, 5 а также регистры 4 и 6 принимают значения й, Ь, а, Ъу по шинам 18, 19, 21, 23 (где значения а.,, Ь,, а, Ъ определены из (2).
В момент поступления третьего
О импульса на вход регистра 39 сдвига возбуждается третий его выход. сигнал с которого устанавливает триггер 35 в единичное состояние.- При этом элемент И 31 закрывается, а
15 элемент И 32 открывается. После этого импульсы с выхода опорного генератора 29 начинают поступать через элемент 32 на регистр 40 сдвига. Сигнал на первом выходе регистра 40 сдвига через элемент 1ШИ 46 обеспечивает сдвиг содержимого делителя 2 на один разряд влево. Сигналом на втором выходе регистра 40 сдвига, который поступает на пятый и через элемент ИЛИ 46 на первый выходы блока 16 управления, обеспечивается еще один сдвиг влево содержимого делителя 2, а также сдвиг . . вправо на один разряд содержимого
30 регистров 4 и 6. Сигналы с выхода элемента 1ШИ 46 через элемент ИЛИ 45 поступают на четвертый ВЕ.ТХОД блока 16 управления. Данным сигналами осуществляется сдвиг вправо на 2 разряда содержимого делителей 3 и 5. Управление делителями 5 и 3 осуществляется с выхода триггера ,35 (третий управляю1: 1й выход блока 16
40 управления). Сигналом единичного уровня обеспечивается режим работы при котором реализуе-тся сдниг ьираво. Если сигнал нулевого уровня, то осуществляется сдвиг влево. вертый импульс, поступивпшй на вход регистра 40 сдвИ-га, во збу5кдает его четвертый выход. Сигнал с данного выхода поступает на восьмой выход блока f6 управления и обеспечивает
5Q режим суммирования сумматора 7 ia кото-.рый поступает информация из регистра 1 сдвига и делителя 2. Если триггер 14 знака сумматора не изменяет своего нулевого состояния, т.е. содер-
,с жимое сумматора положительно (неравенстйо (7) не выполняетс,я), то сигнал с четвертого выхода регистра 40 сдвига проходит через открытый
9
потенциалом с инвертора 47 элемент И 48 и через элемент ШШ 42 поступает на одиннадцатцй выход блока 16 управления. Этот сигнал обеспечивает сброс сумматора 7 в нулевое состояние, а также сдвиг содержимого регистра 15 сдвига на один разряд влево. Далее цикл работы повторяется , Вновь последовательно возбуждаются регистра 40 сдвига, тар как триггер 35 не изменяет своего состояния. Этот цикл повторяется до тех йор, пока триггер 14 знака не изменит своего состояния,
что является признаком выполнения условия (7).
Если триггер 14 знака Изменяет свое состояние, элемент И 49 открывается, а элемент И 48 закрывается. Сигнал с выхода элемента И 49 через элемент ИШ 38 устанавливает триггер 35 в нулевое состояние. Вновь импульсы опорного генератора 29 поступают на вход регистра 39 сдвига; Четвертый импульс, поступивпшй на вход регистра 39 сдвига, возбуждает четвертый выход, сигнал с которого через элемент ИЛИ 43 поступает на шестой вьгход блока 16 управления. Данный сигнал обеспечивает работу сумматоров 9 и 11. кото рые принимают содержимое соответственно делителя 3, регистра 4 и делителя 5, регистра 6. Пятый импульс на входе регистра 39 сдвига возбуждает пятую Выходную шину регистра, сигнал с которой поступает на девятый, а через элементы ИЛИ 45 и 50 на четвертый и седьмой выходы блока 16 управления. При этом обеспечивается выполнение следующих опера ций: содержимое регистра 15 переписывается в счетчик 121 содержимое делителей 3 и 5 сдвигается влево на один разряд; к содержимому сумматора 8 добавляется содержимое сумматора 9. а к содержимому сумматора 10 - содержимое сумматора 11 Сигнал с шестого выхода регистра 39 сдвига проходит через элемент ИЛИ 44 на десятый выход блока 16 управления, хюступает на вход счетчика 12 и вычитает из его содержимого единицу. Сигнал с седьмого выхода-регистра 9 сдвига поступает на двенадцатый и через элемент ИЛИ 44 на десятый выходы блока 16 управления, что обеспечивает уста6037010
новку регистров 4 и 6 в нулевое состояние и уменьшение содержимого счетчика 12 на еще одну единицу. Таким образом, в делителях 3 :и 5
5 к данному моменту времени устанавливаются величины 4 РК и 4 Р, соответственно на сумматорах 9 И 11 величины а на сумматорах 8 и 10 - величины и После этого параболический интерполятор начинает вычислять координаты и координатные приращения всей кривой в соответствии с выражениями (6), для чего последователь15 содержимому сумматоров 9 и 11 добавляется содержимое делителей 3 и 5. Полученные величины добавляются к содержимому сумматоров 8 и 10, т.е. :вычисляются .1у
io и р.л,/. , . , .
в предлагаемом пац аболическом интерполяторе данные операции реализуются следующим образой.
В момент ПоступленияВосьмого
25 импульса на вход регистра 39 сдвига возбуждается его восьмой выход, что обеспечивает взведени (по S-входу) триггера 36. Триггер 36 открывает элемент И 33 и закрывает
30 элемент И 31. Импульсы с опорного генератора 29 поступают теперь на вход регистра 41 сдвига. Сигналы, последовательно формируемые на трех его входах, обеспечивают вьтолнение
J, следующих действийt подсуммирование содержимого делителей 3 и 5 к содержимому сумматоров 9 и 11 (содержимое регистров 4 и 6 - нулевое). Управляющая цепь при этом такая сигнал с первого выхода регистра 41 сдвига через элемент ИЛИ 43 на шестой выход блока 16 управления; подсуммирование содержимого сумматоров 9 и 11 к содержимому сумма45 торов 8 и 10. Управляющая цепь - второй вькод регистра 41 сдвига элемент ИЛИ 50 - седьмой выход блока 16 управления вычитание единицы из содержимого счетчика 12. Управ5Q ляющая цепь - третий выход регистра 41 сдвига, элемент ИЛИ 44 - десятый выход блока 16 управления.
Данный цикл работы повторяется до момента установления счетчика 12
55 состояние 1, т.е. его переходу через нулевое состояние. Триггер 13 устанавливается в единичное состояние, являющееся признаком того. что определены все 2 точек кривой Сиггал с выхода триггера 13 знака поступает на вход установки в нуль (R-ВХОД) триггера 36 и через элемент ИЛИ 37 на R-вхбд триггера 34. Триггеры устанавливаются в нулевое соётоякие. Элементы И 30 и 33 закр ты. Блок 16 управления подготовлен к дальнейшей работе интерполятора. Таким образом, введение в параболический интерполятор пяти сумма торов, двух триггеров и новьк свя- эей иозвопяет повысить точность воспроизведения требуемой кривой, поскольку реализуется метод суммир&ва тя разностей, значения которых Е1Ы раю1ся из условия обеспечения допустимой погрешности воспроизведепия. Дайная по грешнрсть не является накапляваюк ейсй и, изменяется в пределах кйясдого из участков воспроизведения от О До е {назначается из условий решаемой задачи). В известном устройстве Погрешность воспроизведения является накапливаю щейся за счет интегрирования, что й редъявляет весьма жесткие требования к точности задания исходных дан тле. Данное обстоятельство существевноогра шчивает область испояьзованая поробных йнтерполяторкэв. Кроме toro, известное устройство пв зволяё1 воспроиз водить к ривые ctTfK ro «фйентированные симметрично отйосй ея ьно осей координат, что определяет его ограниченные фувкщю нальйые возможности. В:предлагаемом параболическом интерполяторе задача врспроизведеиия кривызг, смещенных и повернутых отярситеяьно осей координат, досjTHtraeTCjjt путем соответствукддего задания трех точек параболы, кото- рые определяют координаты векторов Р , РЗ , fg . Предлагаемый параболический интерполятор обладает, по сравнению с известньм устройством,- более высокой точностью воспроизведения заданных кривых и более широкими функциональными возможностями, что определяется объемом решаемых интерполятором задач - интерполируемые кривые могут быть произвольно ориентированы относительно осей координат. Предлагаемый параболический интерполятор отличает высокое быстродействие, которое достигается за счет того, что используются только операции сдвига, сложения и вычитания. Очевидно, что предлагаемый интерполятор обладает более высокими технико-экономическими показателями. Внедрение параболического интерполятора обеспечивает при Современных требованиях к роботш -манипуляторам и станкам с ЧПУ больпшй эффект по сравнению с изв;естными устройствами, так как позволяет воспроизводить любые требуемые кривые (траектория движения роботаманипулятора, или сложный профиль обрабатываемой детали на станке с ЧПУ) с заданной точностью. Создан макет параболического интерполятора, который прошел испытания в научно-исследовательской лаборатории института. Испытания подтвердили его Технические характеристики и целесообразность его использования при разработке систем управления станками с ЧПУ и роботами-манипуляторами.
§
ч
м
«Si. «N
5
ч5в
1 CM
«) :$
Ъ
ь
«SI
N
(О
| , Авторское свидетельство СССР № 842802, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Beck R | |||
| M.,MitcheEe Т | |||
| М | |||
| Automatic controt The Degign of DAFT, A DigitaE-AnaEOgue Funotion TabCe, 1960, S 2, p | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
