1 11 Изобретение относится к робототех нике, а именно к манипуляторам, пред назначенным для захвата и транспорти ровки длиномерных объектов, преимущественно работающих в шахтной вьфаботке. . Цель изобретения - расширение функциональных возмояаюстей манипулят ра за счет осуществления ориентации захватываемого объекта относительно схвата -манипулятора и определения типа захватываемого объекта. На чертеже изображена блок-схема предлагаемого манипулятора, Манипулятор .содержит установленны на губках 1 и 2 схвата датчики 3 и 4 веса, выходы которых подключены к входам блока 5 сумматора и блока 6 сравнения, выходы которых соединены с входом блрка 7 определения и индикации знака, множительны блок 8, в котором происходит вычисление длины захватываемого объекта, соединенный с вькодом блока 9 задания веса одног метра захватываемого объекта и с вьрсо дом блока 5 суммирования, блок 10 выработки команд, к одному из входов которого подключен выход блока 5 сравнения, а к другим входам - выход блока 7 определения и индикации зна.ка и множительного блока 8. Выход бл ка 10 выработки команд соединен с блоком 11 коммутации и индикации команд управления, который соединен с приводом губок и манипулятора (не по казаны). Кроме того, на кронштейне схвата установ гены два бесконтактных датчика 12 и 13 положения захватывае мого объекта 14, выходы которых подключены к дополнительному блоку 1 сравнения выход которого подключен к входу блока 11 коммутации и индика ции команд управления. Выходы датчиков 12 и 13 Подключены также к средству 16 блокировки привода манипулятора. Узел крепления кронштейна, выпо нен в виде подвеса 17, Манипулятор работает следуюп1им образом. Оператор визуально определяет профиль захватываемого объекта и задатчиком 9 вводит в множительный блок 8 сигнал, пропорциональный весу одного метра захватываемого объекта, на другой вход которого Приходит сигнал р суммаФора 5, пропорциональный весу захватываемого объекта. При произвольном захвате с места складирования (например шахтная площадка) длиномерного. элемента в зависимости от смещения центра тяжести длиномера в датчиках 3 и 4 появляется сигнал, который суммируют в блоке. 5, а в блоке.6 вычитают и с учетом знака . подают в блок 7, где от деления разности на сигналов определяют величину, а по знаку сигнала - направление перехвата. Сигнал о величине и направлении перехвата поступает в1 блок 10 вьфаботки команд, куда также поступает информационн()1Й сигнал с блока 8, вычисляющего длину захваченного груза. Сигнал с блока 10 выработки команд .поступает в блок 11 коммутации и индикации команд управления, куда одновременно поступает сигнал с дополнительного блока 15 сравненияj пропорциональный разности сигналов бесконтактных датчиков 12 и 13. Таким образом в блоке 11 образуется информация о положении захватываемого объекта относительно схвата и его конфигурации, что позволяет осуществить точное управляющее воздействие на привод манипулятора для перехвата груза. При столкновении манипулируемого длиномерного объекта или самого схвата с посторонними объектами нарушается положение длиномерного объекта по отношению к бесконт-актным датчикам 12 и 13, изменяя их выходные сигналы, что фиксируется средством 16 блокировки привода манипулятора, вызывая его отключение.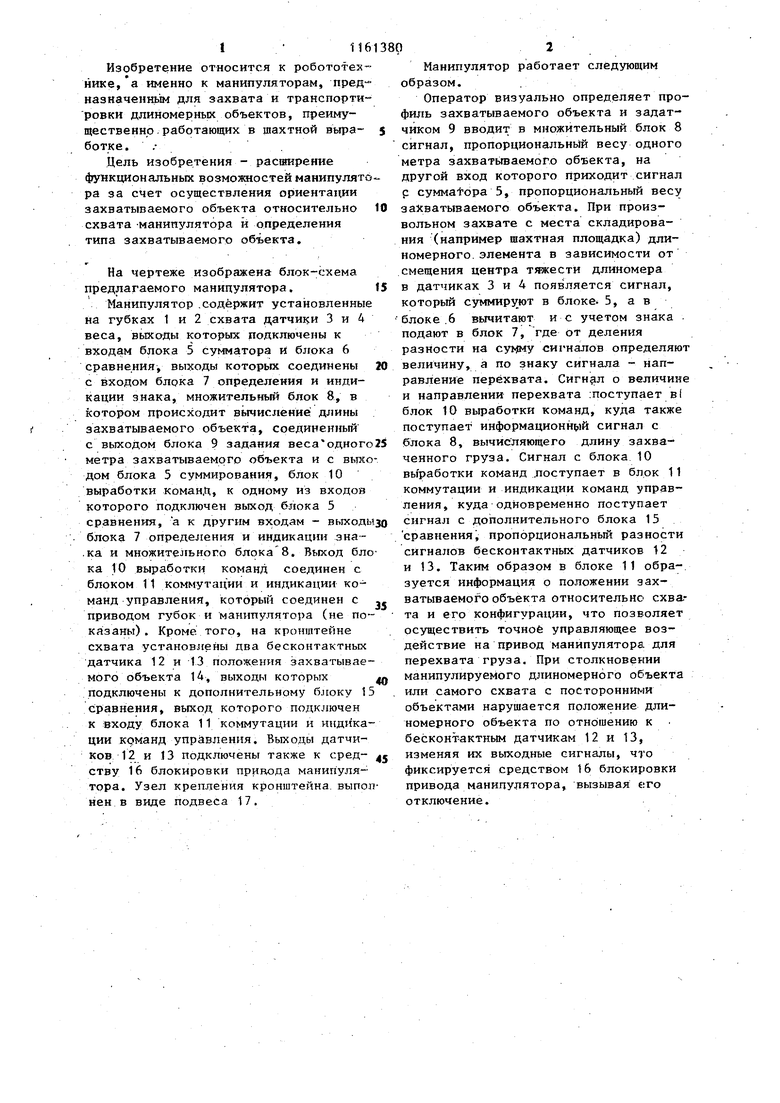
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Манипулятор | 1984 |
|
SU1187982A2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
1. МАНИПУЛЯТОР ДЛЯ ДЛИНОМЕРНЫХ ОБЪЕКТОВ, содержащий схват, выполненный в виде двух пар губок с приводами их перемещения, установленных на кронштейне по обе стороны от узла крепления кронштейна к звену манипулятора, отличающийс я тем, что, с целью расширения функциональных возможностей за счет осуществления ориентации захватываемого объекта относительно схвата, он снабжен датчиками веса, установленными на каждой паре губок, блоком задания веса одного метра захватываемого объекта, сумматором, блоком сравнения, блоком определения и индикации знака, множительным блоком с цифровой индикацией, блоком выработки команд, блоком коммутации и индика ции команд управления, при этом вьгходы датчиков веса подключены к входам сумматора и блока сравнения, вьгход суммлгора соединен с из входов блока определения и индикации знака и с одним из входов множительного блока с цифровой индикацией, к другому входу которого подключен блок задания веса одного метра захватываемого объекта, выход блока сравнения подключен к другому входу блока определения и индикации знака и к одному из входов блока выработки команд, к другим входам которого подключены выход блока определения и индикации знака и вьгход множительного блока с цифровой индикацией, выход блока выработки команд соединен с блоком коммутации и индикации команд управления, который соединен с приводами. 2.Манипулятор по п. 1, о т л и(Л чающийся тем, что, с целью определения типа захватываемого объекта, он снабжен двумя бесконтактными датчиками положения объекта, установленными на кронштейне по обе СТОРОНЫ схвата, и дополнительным блоком сравнения, при этом выходы датчиков подключены к входам допол-. нительного блока сравнения, выход : эо которого соединен с блоком коммутации и индикации команд управления. 3.Манипулятор по пп. 1 и 2, отличающийся тем, что, с целью обеспечения надежности работы, он снабжен средством блокировки, а узел крепления кронштейна выполнен в виде подвеса, при зтом средство блокировки соединено с выходами датчиков положения.
| Захват | 1980 |
|
SU885001A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
