1
f
Изобретение относится к захватным устройствам, применяемым в манипуляторах для захвата и перемещения различных предметов, в частности, деталей, имеющих форму тел вращения. Оно может быть использовано в машиностроении в области автоматизации загрузочных устройств к металлорежущим станкам с ЧПУ.
Известен захват манипулятора, содержащий корпус, по крайней мере две пары зажимных губок, каждая.из которых установлена на своей оси, закрепленной в корпусе, и связана через соответствующий ей ползун с приводом, например, в виде силового цилиндра 1.
Недостатком известного захвата является отсутствие возможности выбора ,баз по длине детали для ее зажима, т.е. обе пары зажимных губок установлены в корпусе на постоянном расстоянии друг от друга.
Цель изобретения - осуществление зажима деталей в широком диапазоне их размеров (по диаметру и длине).
Указанная цель достигается тем, что на штоках привода жестко закреп лены траверсы, выполненные в виде планок с пазами, взаимодействующими
с выступами ползунов, установленных в направлякхцих обоймах, сидящих на осях губок и снабженных гайками, которые взаимрдействуют с винтами, установленными в корпусе параллельно осям губок.
Привод выполнен в виде сдвоенных силовых цилиндров с параллельным подводом рабочей среды.
10
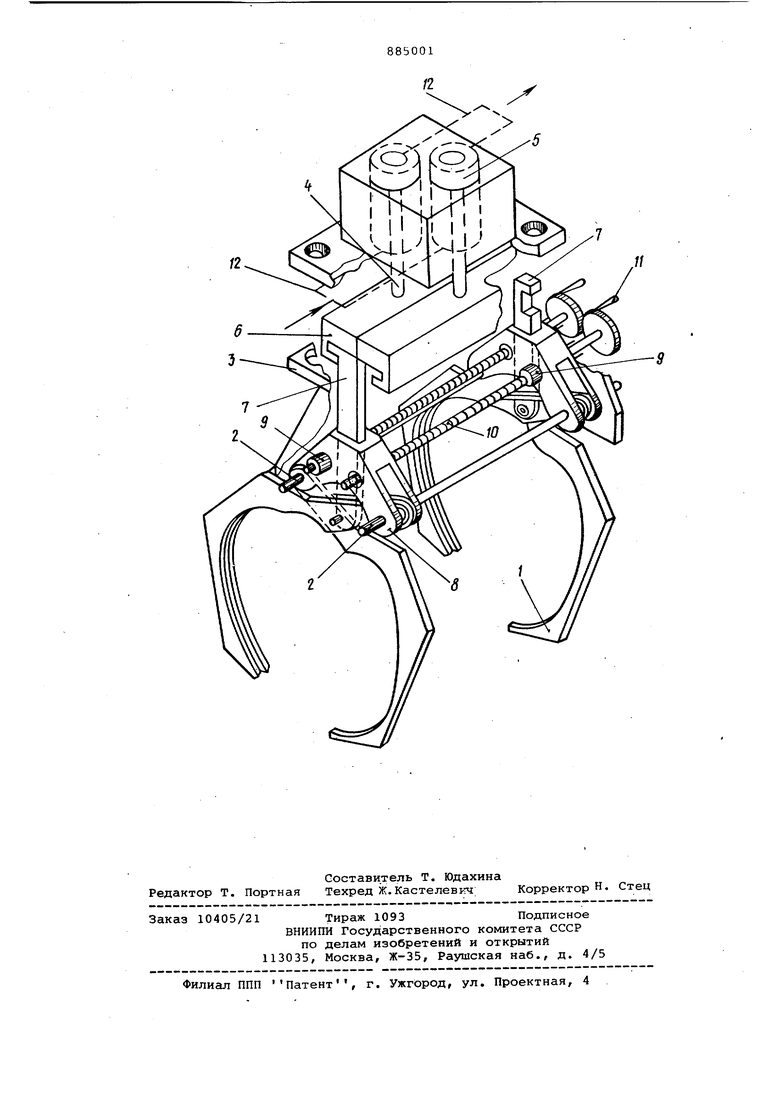
На чертеже показан предлагаекый захват, общий вид.
Захват содержит две пары губок 1, установленных на осях 2, которые закреплены в корпусе 3, штоки 4 силовых цилиндров 5, траверсы 6,,жестко Закрепленные на штоках, ползуны 7, кг1ждый из которых расположен в своей обойме 8, установленной на осях губок, и шарнирно соединен, с губками, 20 гайки 9, закрепленные в обоймах, и . связанные с винтами 10, маховички 11, трубопроводы 12.
Захват работает следукадим образом.
25
При перемещении штоков 4 вниз закрепленные на них траверсы б, взаимодействуя с ползунами 7, перемещают их также вниз и поворачиваиот шарнирно связанные с ними губки 1
30 вокруг осей 2 до тех пор, пока одна
из пар губок 1 не замкнется на большем диаметре ступенчатого вала; при этом прекращает движение вниз соответствующей ей шток 4 с закрепленной на нем траверсой 6, а рабочая среда (например/ масло) продолжает поступать во второй цилиндр 5. Дальнейшее движение второй траверсы 6 и связанного с ней ползуна 7 происходит до тех пор, пока вторая пара губок 1 не замкнется на меньшем диаметре ступен.чатого вала. Давление рабочей среды достигает.в это время одинаковой величины.
Разжим губок 1 происходит при движении штоков 4 вверх, причем разжим обеих пар губок 1 одинаков и ограничивается исходным положением штоков 4 во втянутом состоянии.
При выборе..баз- по длине детали (ступенчатого вала) каждая пара губок 1, заключенная в соответствующей ей направляющей обойме 8, перемещается по осям 2 при помощи соответствующего каждой направляющей обойме 8 винта 10, приводимого во вращение маховичком 11. Винт 10, взаимодействуя .с гайкой 9, закрепленной на направляющей обойме 8, обеспечивает независимое перемещение каждый своей паре губок 1 вдоль осей 2.
При этом изменяется расстояние между парами губок 1, что обеспечивает возможность удобного выбора баз для зажима ступенчатого вала в захвате.
По сравнению с существующими конструкциями захватных устройств предлагаемый захват обеспечивает свободный выбор баз по длине детали, что повышает надежность зажима при ее перемещении; захват является широкоуниверсальным (регулирование по длине и диаметру), это позволяет сократить время на частую переналадку сменных захватных устройств в случае многономенклатурного и мелкосерийного производства (для деталей с разными длинами и диаметрами).
Формула изобретения
1.Захват манипулятора, содержащий корпус, по крайней мере две пары зажимных губок, каждая из которых установлена на своей оси, закрепленной в корпусе, и связана через соответствующий ей ползун с приводом, например, в виде силового цилиндра, отличающийся тем, что,
с целью осуществления захвата деталей в широком диапазоне их размеров, захват снабжен траверсами, выполненными в виде планок с пазами, направляющими обоймами, а также винтами, причем на ползунах выполнены выступы а на штоках силовых цилиндров жестко закреплены траверсы, при этом пазы траверс имеют возможность взаимодействия с выступами ползунов, которые установлены в направляющих обоймах, смонтированных на осях губок и снабженных гайками, которые установлены с возможностью взаимодействия с винтами, установленными в корпусе параллельно осям губок.
2.Захват по п. 1, отличающийся тем, что силовые цилиндры приводов.губок выполнены с параллельным подводом рабочей среды.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 40 592591, кл. В 25J 15/00, 1976.
12
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1980 |
|
SU905061A1 |
| Захват | 1983 |
|
SU1117206A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Схват | 1986 |
|
SU1390021A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват манипулятора | 1977 |
|
SU642150A1 |