I Изобретение относится к машиностроению и может найти применение в промышленных роботах, манипуляторах, автооператорах и устройствах автоматизации штамповки.
Целью изобретения является повышение удобства обслуживания и сокращение времени на переналадку.
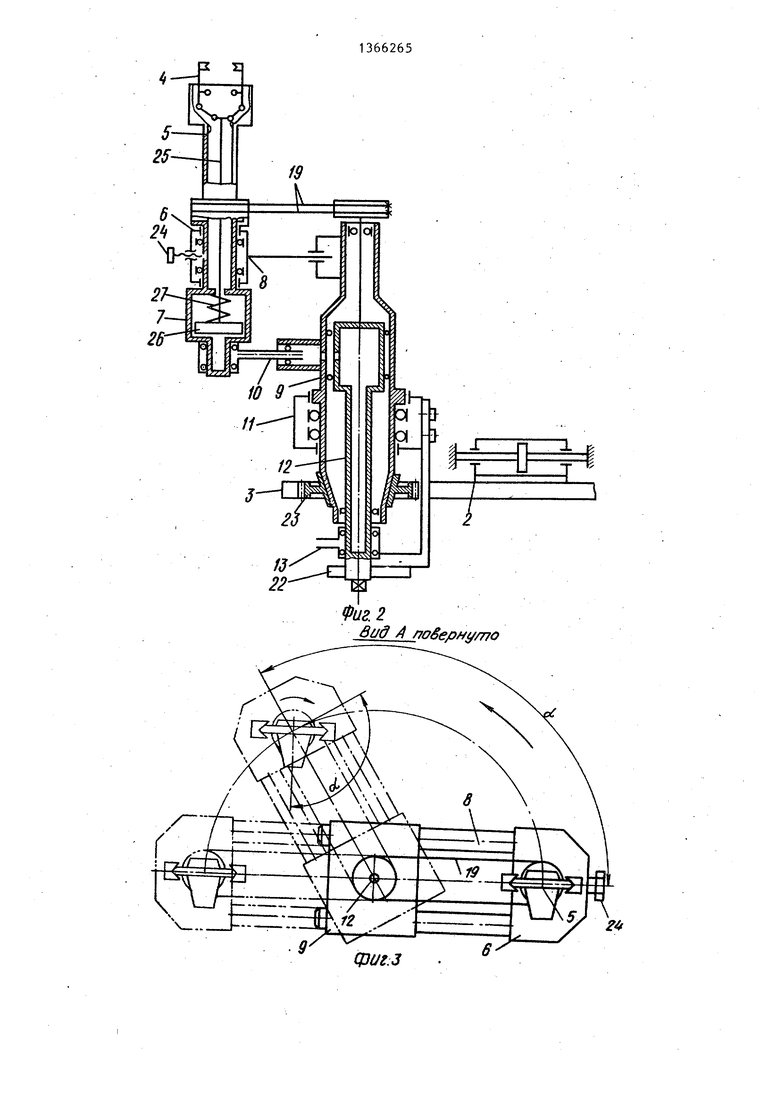
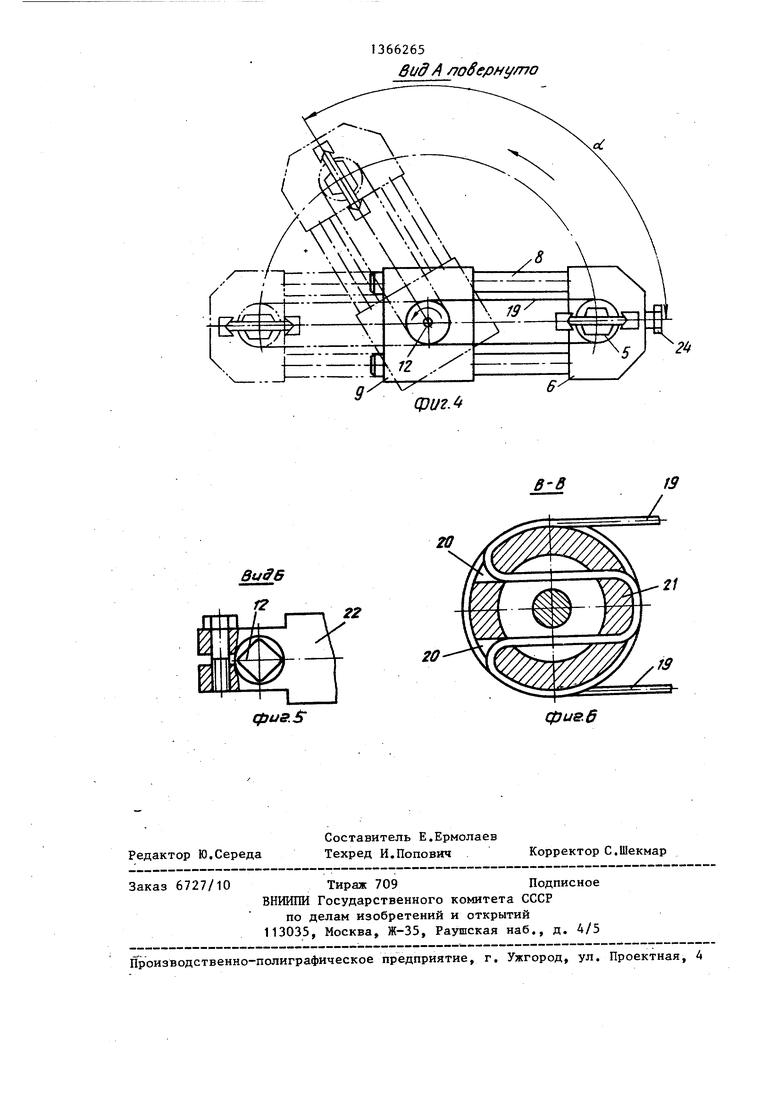
На фиг о 1 схематически изображено устройство, общий ВИД , на фиг, 2 - кинематическая схема руки с приводом поворотаj на фиг. 3 - вид А на фиг. 1 (схема поворота схвата с дополнительным вращением); на фиг. 4 - вид А на фиг, 1 (схема поворота схвата,без дополнительного вращения- кантование)- на фиг. 5 - вид Б на фиг. 1; на фиг. 6 - сечение В-В на фиг. 1; на фиг о 7.- разрез Г-Г на фиг. 1,
Устройство переноса состоит из станины 1, привода вращения рук, состящего из пневмоцилиндра- 2, установленного под станиной 1, рейки 3, установленной на пневмоцИлиндре 2, трех рук, установленных на станине 1 каждая из которых (фиг, 2) включает в себя захватный орган 4, установленный на валу 5, который установлен в корпусе 6, На валу 5 установлен пнев моцилиндр 7 зажима захватного органа Корпус 6 крепится на направляющих 8, которые установлены на гильзе 9, Пневмоцилиндр 7 связан через вращающееся телескопическое уплотнительное соединение 10 с гильзой 9, установленной в корпусе 11, которым рука крепится к станине 1, Внутри гильзы установлен поворотный вал 12, на котором установлено вращающееся уплотнительное соединение 13, На валу поворотного вала 12 (фиг, 5) установлена часть шкива 14, жестко связанная с валом штифтом 15,, На этом же валу устанавливается часть шкива 16, соединяющаяся с частью шкива 14,жестко связанная с валом штифтом 15, На этом же валу устанавливается част шкива 16, соединяющаяся с частью шкива 14 по конической поверхности 17 путем затягивания гайки 18, Концы троса 19 закреплены винтами на частях шкива 14 и 16, Трос 19 проходит через отверстия 20, вьтолнен- мые в шкиве 21 силового цилиндра, установленного на валу 5. Вал 12 удерживается от проворота клеммным
зажимом стопора 22, закрепленным на корпусе 11 (фиг. 6 и 7).
На гильзе 9 на конической шейке установлено зубчатое колесо 23, входящее в зацепление с рейкой 3, В корпусе 6 установлен фиксирующий винт 24, Захватный орган 4 соединен штоком 25 с поршнем 26 пневмоцилиндpa 7. На штоке 25 установлена пружина 27 сжатия. Привод вращения рук закрыт кожухом 28. Устройство перекладки входит в состав фронтального манипулятора и устанавливается на
механизме выдвижения и подъема (не показан)„ Перекладка поворотом может быть осуществлена двумя способами; с дополнительным вращением схвата и без дополнительного вращения схвата,
Устройство с дополнительным вращением схвата работает (фиг, 2-4) следующим образом,
Пневмоцилиндр 2 с закрепленной на нем рейкой 3 перемещается по
стрелке влево (фиг. 2), При этом
входящее в зацепление зубчатое колесо 23 каждой руки с рейкой передает крутящий момент через затянутое коническое соединение на гильзу 9, поворачивая ее. Вместе с ней поворачиваются направляющие 8 и укрепленный на них корпус 6. Вал 12 при этом удерживается от вращения стопором 22 с закрепленным клеммным соединением.
Фиксирующий винт 24 вывернут из вала 5, который может теперь поворачиваться в корпусе 6.
При повороте гильзы 9 вокруг вала 12 одна ветвь троса 19 набегает
на шкив неподвижного вала 12, а другая сбегает в него, поворачивая тем самым вал 5 с установленным на нем схватом 4 на угол, равный по величине углу поворота гильзы 9, но с обратным направлением вращения. Таким образом, деталь в схвате в процессе ее перекладки из ручья в ручей занимает всегда одно и то же положение по отношению к плоскости разъема штампа,
Без дополнительного вращения схва- та механизм перекладки работает следующим образом (фиг, 2 и.4).
Винт 24 вводится в тело вала 5
и препятствует его вращению относительно корпуса 6, а клеммное соединение стопора 22 с валом 12 разжимается, давая возможность поворачиваться валу 12, При повороте гильзы 9
а
8
Фиг.}

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
Устройство относится к области машиностроения, в частности к автоматизации и роботизации штамповочного производства. Цель изобретения - по- вьш1ение удобства обслуживания и сокращение времени на переналадку. Для /7 а этого в устройстве переноса заготовок шкив поворотного вала 12 выполнен из двух частей 14 и 16, имеющих конические поверхности 17, одна из которых жестко закреплена на поворотном валу 12, а другая установлена на поворотном валу с возможностью вращения и соединяется с первой по коническим поверхностям 17. Причем концы гибкой кинематической связи 19 пропущены через отверстия шкива силового цилиндра, проходящие через его цилиндрическую поверхность, и закреплены на каждой части шкива поворотного вала, а стопор имеет клеммное крепление, соединяющее его с поворотным валом 12. 7 ил. г-г с (Л IS 1U. со О5 05 К О5 сл N)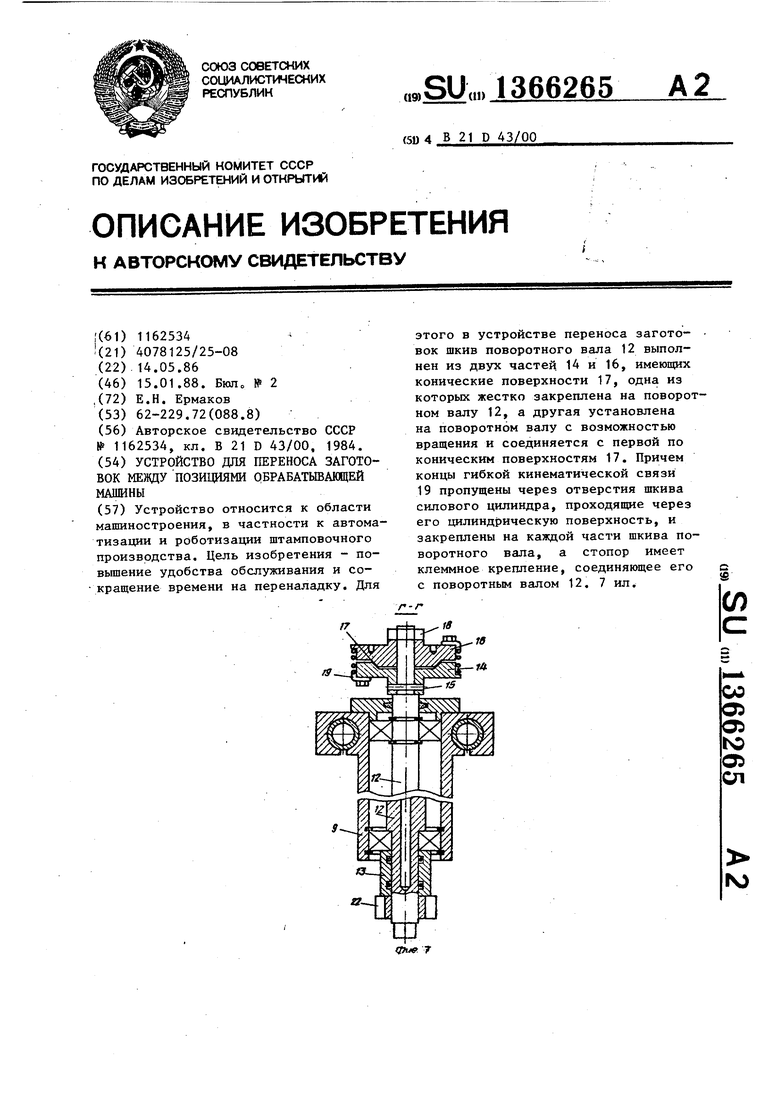
5- 252
26Фиг. 2
вид А noSeDHt//770
i
ФШ:3
фиг.
фигВ В
фи5.6
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
