Изобретение относится к области транспортных средств и может быть применено для механизации транспортноскладских работ на базе канатной до-- 5 роги в сельском хозяйстве, промышленности и строительстве.
Известна подвесная канатная дорога маятникового типа, содержащая несущий, тяговый и грузоподъемный ка-Ю наты, концевые и промежуточные опоры, грузовую тележку с ковшом, подвешенным на тележке на грузоподъемном канате через систему полиспаста, лебедку с электроприводом, бараба- 15 ном и канатоведущим шкивом Щ
Недостатком такой дороги является сложность конструкции.
Наиболее близким решением является подвесная канатная дорога маятни- 20 кового типа, содержащая несущий канат расположенный на головной, тыловой и промежуточных опорах, упор-разгружатель, закрепленный на несущем канате, тяговый канат, приводимый в движение 25 канатоведущим шкивом, грузовую тележку, перемещаемую по несущему канату, и ограничитель грузового хода с конечным выключателем, включенный в цепь .нормально разомкнутых контактов 2. 30
Недостатком такой дороги является то, что она работает в неавтоматическом режиме и возникновение динамических нагрузок при разгрузке, ковша.
Целью является работа подвесной канатной дороги маятникового типа в автоматическом режиме.
Достигается это тем, что в цепи нормально разомкнутых контактов установлено реле времени, at головная опора снабжена ограничителем порожнего хода тележки с дополнительным конечным выключателем.
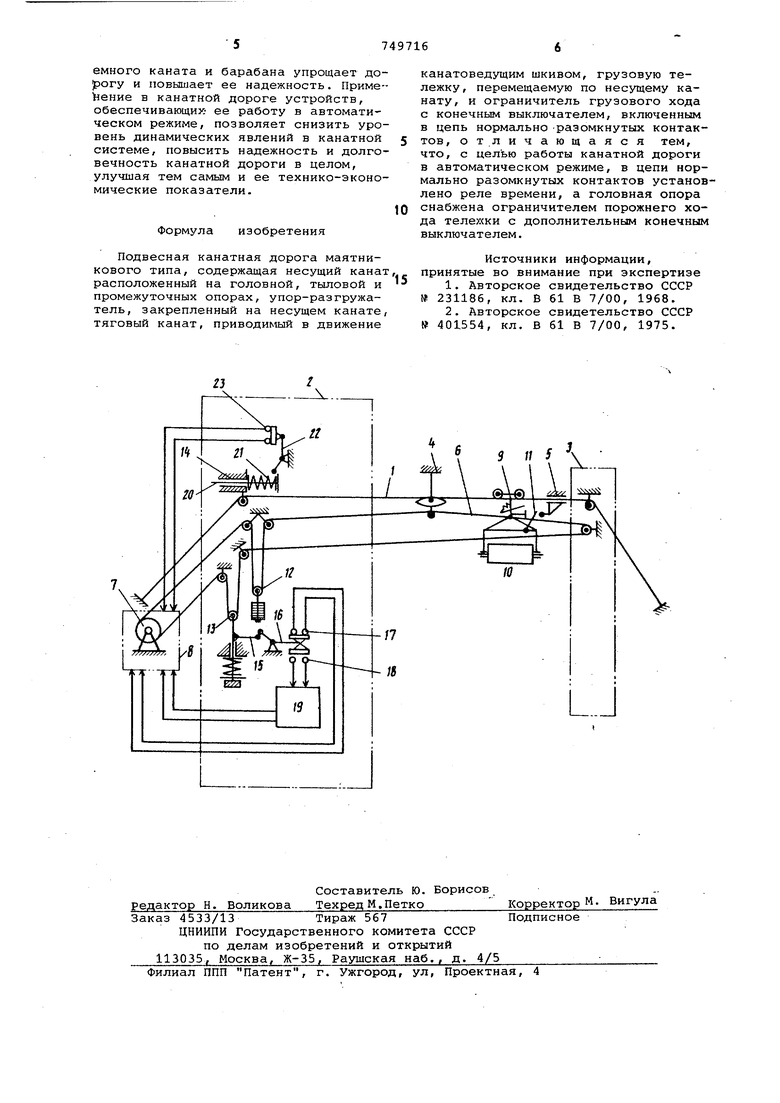
На чертеже изображена подвесная канатная дорога маятникового типа.
Подвесная канатная дорога состоит из несущего каната 1 (натяжное устройство на чертеже не показано), навешенного на башмаки головной опоры 2, тыловой 3 и промежуточной 4 опор, упора-разгружателя 5, закрепляемого на несущем канате 1 в любой точке пролета, замкнутого в кольцо тягового каната 6 и приводимого в движение канатоведущим шкивом 7, приводной лебедки 8 и грузовой тележки 9 с ковшом 10 опрокидного типа.
Грузовая тележка 9 снабжена подпружиненным фиксатором от спадания тележкя с несущего каната 1, обеспечивающим также беспрепятственный проход тележки 9 через (5аил-/1ак промежуточной опоры 4, и известным рычажнш.1 механизмом, расфиксирующим ковш 10 п)И контакте рычага 11 с упором-разгру/кателем 5 при разгрузке ковша 10.
Прмзод канатоведущехо шкива 7 лебедки 8 осуществляется от асинхрон:ого электродвигателя с помощь.о магнитных гускателой (на чпртеже ме показано ) .
Io ro.) o;:t:oil опоре 2 смонтированы ; вк/почены s систему тягоного каната натя-.iHje устройство 1 и ограничитель 13 1руз(лвого хода. Кроме того, на головной опоре смонтирован огранич;1те ь 14 холостого хода- грузовой те.те:«К11 3 ..
Ограг,ичи ель 13 грузового хода состоит из системы неподвижных и подBH.iuioio блоков, огибггемых тя.говым к; натом, штока с поводком 15 и регу/ ируе;- ой на заданное усилие пружиной, сонечного выключателя 16, нормально замкнутые контагсты 17 которого включены в цепь управления грузорым ходом электродвигателя, а нормально разом1;нутые контакты 18 подключены к реле времени 19, обеспечиваюидего включение э л еж т род в и га те л я на порожний ход через заданный интервал вреглени после срабатывания конечного выключателя 16.
Ограничитель 14 порожнего хода слу;кит для остановки грузовой тележки 9 при ее подходе к головной опоре 2 и снижения динамических явлений в тяговом канате б после остановки грузово/ те.иекки 9 и состоит из штока 20, помещенного в направляющую, пружины 21, удерживающей шток в исхоном положении и дополнительного конечного выключателя 22, нормально замкнутые контакты 23 которого включны в цепь управления обратным ходом электродвигателя лебедки. Тяговый канат 6 обводится через канатоведущий шкив 7, обводные блоки на тьшовой опре натяжного устройства и ограничителя 1рузового хода, поддерживающие блоки на промежуточной опоре и крепится концами к грузовой тележке, замыкаясь на ней в кольцо. Совокупност описанных устройств подвесной канатной дороги обеспечивает автоматизацию ее рабочего цикла.
Работа подвесной канатной дороги маятникового типа осуществляется следующим образом.
После загрузки,ковша io у головной опоры (например, навозом на животноводческой ферме с помощью наклонного транспортера) нажатием вручную кнопки пуск включают электродвигатель лебедки 8 на грузовой ход и приводят в движение канатоведущий шкив 7. Вращающийся канатоведущий шкив приводит в движение тяговый канат б и перемещает груженную грузовую тележку 9 по несущему канату 1 к месту разгрузки, где на несущем канате 1 смонтирован упор-разгружатель 5. По достижении груженой грузовой тележкой 8 упора-разгружателя 5 рычаг 11 тележки входит в контакт с упором и через рычажную систему расфиксирует ковш, который под действием груза опрокидывается и разгружается .
При дальнейшем вращении канатоведущего и1кива 7 в набегающей ветви тягового каната возникает усилие, превышающее номинальное, которое сжимает пружину ограничителя грузового хода 13, и шток с поводком 15 получает линейное перемещение, при этом поводок 15 при своем движении поворачивает рычаг конечного выключателя 16 и, размыкая контакты 17 цепи управления, обесточивает катушку магнитного пускателя грузовой ход и отключает от сети электродвигатель лебедки. Одновременно при срабатывании конечного выключателя нормально разомкнутые контакты 18 замыкаются и включают реле времени 19, которое через определенный интервал времени {например 1020 с), необходимый для затухания ко.гебаний несущего каната 1 грузовой тележки 9 после разгрузки, включает электродвигатель на порожний ход.
Вращающийся в обратном (порожнем) направлении канатоведущий шкив перемещает через тяговый канат 6 грузовую тележку 9 с ковшом 10 к месту загрузки, т.е. к головной опоре 2. При подходе к головной опоре 2 грузовая тележка 9 входит в контакт со штоком 20 ограничителя 14 холостого хода, сжимая пружину 21, перемещает в направляющих шток, который в начальный момент своего движения поворачивает рычаг конечного выключателя 22 и, размыкая нормально замкнутые контакты 23 выключателя, обесточивает катушку магнитного пускателя порожний ход и отключает от сети электродвигатель лебедки 8.
Под действием инерционных сил всей движущейся системы грузовая тележка продолжает движение и сжимает на некоторую величину пружину 21, при этом инерционные усилия компенсируются пружиной 21 и грузовая тележка 9 останавливается. Таким образом, рабочий цикл канатной дороги в автоматическом цикле закончен. После новой, загрузки ковша цикл повторяется.
Снижение канатоемкости в предложенной канатной дороге за счет отсутствия грузоподъемного каната ведет к уменьшению ее стоимости и снижению затрат на ее монтаЖ и техобслуживание при эксплуатации. Отсутствие на лебедке барабана грузоподъемного каната и его электродвигателя также уменьшает ее стоимость. Отсутствие грузоподъемного каната и барабана упрощает дорогу и повышает ее надежность. ПримеVieHHe в канатной дороге устройств, обеспечивающих- ее работу в автоматическом режиме, позволяет снизить уровень динамических явлений в канатной системе, повысить надежность и долговечность канатной дороги в целом, улучшая тем самым и ее технико-экономические показатели. Формула изобретения Подвесная канатная дорога маятникового типа, содержащая несущий канат расположенный на головной, тыловой и промежуточных опорах, упор-разгружатель, закрепленный на несущем канате тяговый канат, приводимый в движение канатоведущим шкивом, грузовую тележку, перемещаемую по несущему канату, и ограничитель грузового хода с конечным выключателем, включенным в цепь нормально разомкнутых контактов, отличающаяся тем, что, с целью работы канатной дороги в автоматическом режиме, в цепи нормально разомкнутых контактов установлено реле времени, а головная опора снабжена ограничителем порожнего хода тележки с дополнительным конечным выключателем. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 231186, кл. В 61 В 7/00, 1968. 2.Авторское свидетельство СССР 401554, кл, В 61 В 7/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Подвесная канатная дорога маятникового типа | 1982 |
|
SU1165604A1 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Подвесная канатная дорога | 1981 |
|
SU1022843A1 |
| Канатная трелевочная установка | 1975 |
|
SU540757A2 |
| Сдвоенный кабельный кран | 1982 |
|
SU1057403A2 |
| Канатная подвесная дорога | 1973 |
|
SU583322A1 |
| Сдвоенный кабельный кран | 1978 |
|
SU765194A2 |
