Изобретение относится к машиностроению, в частности к станкостроению, для подачи деталей к станкам и агрегатам.
Цель изобретения - повышение надежности схвата в работе за счет возможности удерживания детали при отключенном приводе.
На чертеже изображен схват манипулятора, продольный разрез.
Схват манипулятора состоит из корпуса 1, привода в виде силового цилиндра 2, шток 3 которого соединен посредством шарнира 4 с двумя телескопическими тягами 5, каждая из которых имеет пружины 6 первый стержень 7 и второй стержень 8, причем вторые стержни 8 посредством шарниров 9 и 10 связаны с зажимными губками 11 и 12, установленными в направляюш.их пазах 13 и 14, выполненных в корпусе 1. Схват снабжен пружинами растяжения 15 и 16, установленными в пазах 13 и 14 корпуса 1 и соединяюш,ими его с губками 11 и 12, кроме того, внутри корпуса 1 установлен регулирующий упор 17 с резиновой подушкой 18.
Схват манипулятора работает следующим образом.
При подаче давления в силовой цилиндр 2 приводной шток 3 перемещается, увлекая при этом соединенные с ним посредством шарнира 4 подпружиненные телескопические тяги 5, в результате чего их длина уменьшается, при этом пружины 6 сжимаются и передают усилие сжатия на соединенные с тягой 5 при помощи шарниров 9 и 10 зажимные губки И и 12. При этом вначале зажимные губки Пи 12 перемещаются в направляющих пазах 13 и 14, выполенных в корпусе 1, растягивая при этом пружины 15 и 16 растяжения, а затем захватывают
транспортируемую деталь 19 за внутреннюю поверхность.
Перейдя нейтральное неустойчивое положение, телескопические тяги 5 останавливаются от дальнейшего перемещения с помощью регулируемого упора 17, снабженного резиновой подушкой 18. При таком положении тяг 5 деталь захвачена, причем тяги 5 вернуться в исходное положение не могут, так как они перешли нейтральное неустойчивое положение, следовательно, сбросив давление в силовом цилиндре 2, зажимные губки Ни 12 остаются в рабочем положении, потому что усилие их захвата обеспечивается только сжатыми пружинами 6. Для разжатия зажимных губок 11 и 12 в силовой цилиндр 2 подается давление в обратном направлении, необходимое только для того, чтобы вывести подпружиненные телескопические тяги 5 за нейтральное неустойчивое горизонтальное положение, так
как дальнейшее их движение вместе со щтоком 3 в исходное положение осуществляется за счет разжатия пружин 6. Зажимные губки 11 и 12 возвращаются в исходное положение за счет сжатия пружин 15 и 16 растяжения, освободив транспортируемую деталь 19.
Предложенная конструкция схвата манипулятора, осуществляющего захват детали за его внутреннюю поверхность, по сравнению с известной имеет преимущество, в том, что за счет обеспечения постоянного усилия на зажимных губках, необходимого для захвата детали действием сжатых пружин, и таким образом, устранения зависимости этого усилия от давления рабочей среды в силовом цилиндре значительно повышается надежность захвата.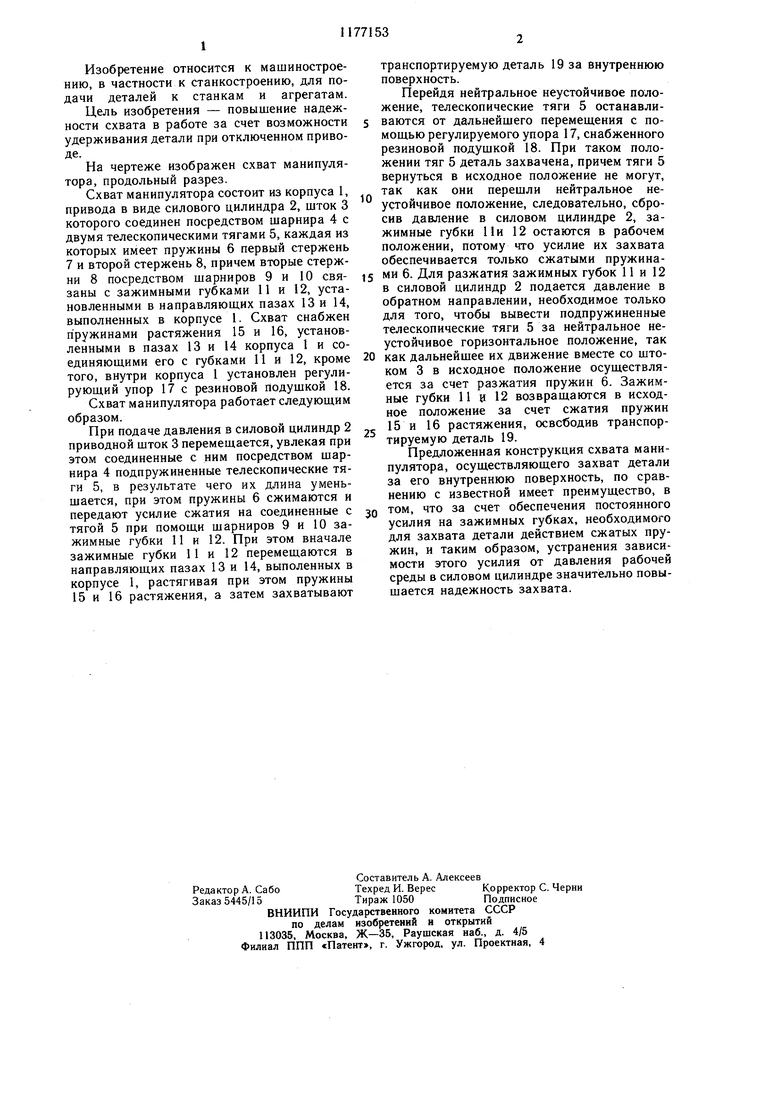
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1274921A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват манипулятора | 1979 |
|
SU850374A2 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
СХВАТ, содержащий корпус, силовой цилиндр, телескопические тяги, выполненные в виде двух соосно расположенных стержней, причем концы первых стержней каждой тяги шарнирно соединены между собой, а второй стержень каждой тяги кинематически связан с зажимными губками, отличающийся тем, что, с целью повышения надежности его в работе, в корпусе выполнены пазы, в которых размещены зажимные губки, щарнирно связанные с вторыми стержнями тяг, а шарнир, связывающий между собой первые стержни тяг. соединен со штоком силового цилиндра.
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
