нен в виде качающегося рычага с кон- роцилнндра и установленного с возтактным датчиком, соединенного че- можностью взаимодействия контактным рез реечную передачу со штоком гид- датчиком с резцом на план-суппорте.
1168342
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовая головка | 1990 |
|
SU1756030A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Револьверный суппорт с горизонтальной осью револьверной головки | 1979 |
|
SU887069A1 |
| Резцовая головка | 1990 |
|
SU1748962A1 |
| Металлорежущий станок для обработки отверстия ступицы железнодорожных колес | 2023 |
|
RU2809883C1 |
| Токарный многооперационный автомат продольного точения с числовым программным управлением | 1979 |
|
SU917921A1 |
| Револьверная головка | 1990 |
|
SU1803275A1 |
| МЕХАНИЗМ ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1973 |
|
SU394167A1 |
| Револьверный суппорт | 1981 |
|
SU1024158A1 |
| Револьверный суппорт | 1982 |
|
SU1111849A1 |
1. РЕВОЛЬВЕРНАЯ ГОЛОВКА СВЕРЛНЛЫЮ-ФРЕЗЕРИО-РАСТОЧНОГО СТАНКА, содержащая основание с осью, установленный на оси поворотный корпус и инструментальные шпиндели, установленные в корпусе с возможностью кинематической связи с приводом вращения в рабочей позиции, отличающаяся тем, что, с целью расширения технологических возможностей путем установки на инструментальном шпинделе расточного план-суппорта, инструментальный шпиндель снабжен механизмом его угловой фиксации, выполненным в виде подпружиненного грибка, установленного в корпусе с возможностью взаимодействия с пазом, вы- пвлненным на шпинделе, скалкой, установленной в центральном.,отверстии шпинделя с возможностью осевого перемещения и фиксированно от поворота, соединенной при помощи шариковинтовой пары с план-суппортом, и кронштейном с подпружиненным фиксатором, установленным на скалке с возможностью относительного вращения и фиксированно в плоскости вращения шпинiti is ii- ssis F. деля и в осевом направлении, при этом ось основания выполнена в виде трубы, а револьверная головка снабжена закрепленной на торце трубы плитой и установленными на плите приводом перемещения расточного план-суппорта, механизмом расфиксации шпинделя, механизмом отвода фиксатора в кронштейне и прибором для настройки резца на план-суппорте. 2.Револьверная головка по п. 1, отличающаяся тем, что привод перемещения расточного плансуппорта выполнен в виде поперечной каретки, кинематически связанной с электродвигателем, и размещенного в трубе пальца с пазом, установленкого на поперечной каретке с возможностью 0аяа прохода через окно, выполненное в бе, и взаимодействия упомянутым пазом с подпружиненным фиксатором в кронштейне, установленном на скалк.е; tenA 3.Револьверная головка по пп, 1 и2, отличающаяся тем, fKooA что механизм отвода фиксатора в кронштейне выполнен в виде гидроцилиндра, установленного с возможностью взаимодействия его штока с фиксатором. К5 4.Револьверная головка по пп.1-3 отличающаяся тем, что механизм расфиксации шпинделя выполнен в виде гидроцилиндра и кинематически связанного с его штоком подпрз/жиненного захвата, установленного с возможностью взаимодействия .с головкой подпружиненного грибка,5.Револьверная головка по пп.1-4 о тличающаяся тем, что механизм для настройки резца выпол
Изобретение относится к области станкостроения, в частности к устройствам для автоматической смены инструмента на многооперационных станках.
Целью изобретения является расширение технологических возможностей путем установки на инструментальном шпинделе расточного план-суппорта.
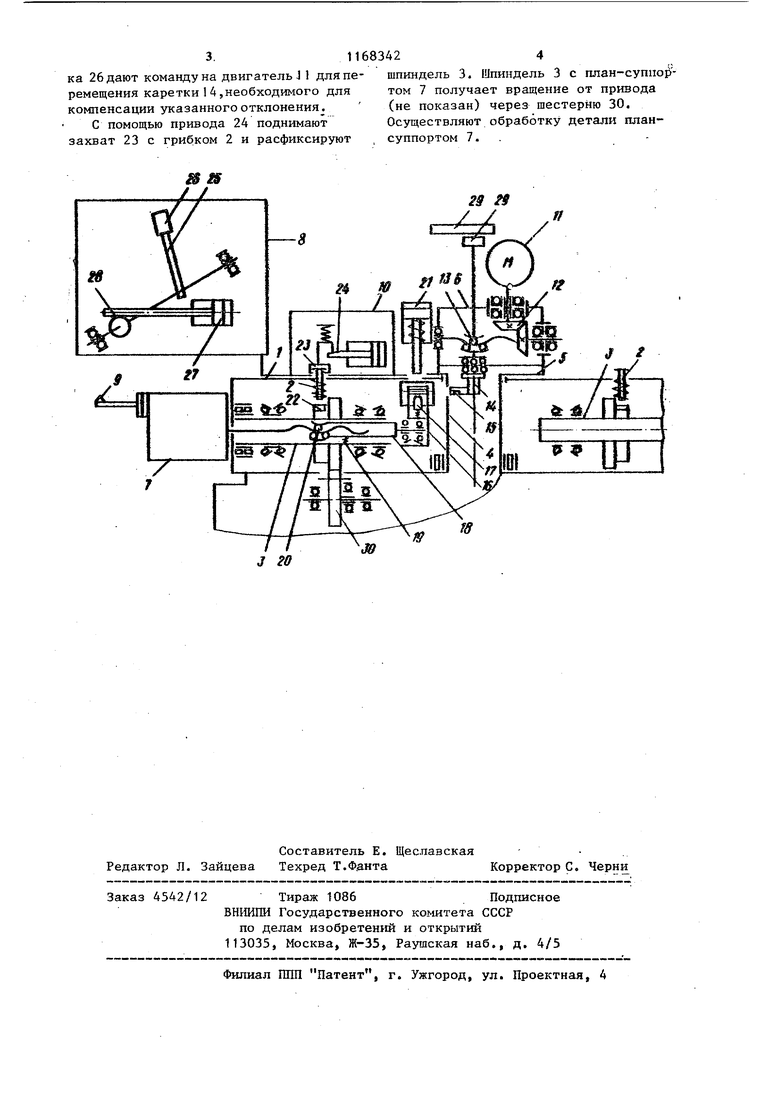
На чертеже схематично представлена револьверная головка, общий вид.
Револьверная головка содержит основание с осью, на которой установлен поворотный корпус 1, в котором смонтированы выполненные в виде подпружиненной грибков 2 механизмы угловой фиксации инструментальных шпинделей 3.
Корпус 1 сидит на оси поворота в виде трубы 4, на верхнем торце которой закреплена плита 5, на которой установлены привод 6 расточного план-суппорта 7, прибор 8 настройки резца 9, механизм 10 расфиксаций шпинделей 3.
Привод 6 включает реверсивный двигатель 11, связанный через коническую зубчатую передачу 12 и шарикевинтовую передачу 13 с поперечной кареткой 14, несущий палец 15. В корпусе 1 размещен кронштейн 16, имеющий пружинный фиксатор 17 пальца 15 и сидящий неподвижно в осевом направлении на скалке 18, размещенной в центральном отверстии шпинделя 3 подвижно в осевом направлении, зафиксированной пружинньм фиксатором 19 относительно него в угловом положении и связанной через шариковинтовую передачу 20 с установленным в шпиндель 3 план-суппортом 7. Меха нидм 21 отвода фиксатора 17 установлен на плите 5 и выполнен в виде I гидроцилиндра.
Ножка грибка 2 входит в продольный паз 22 шпинделя.
Механизм расфиксации 10 выполнен в внце подпружиненного захвата 23 головки грибка, кинематически связанного со штоком 24 гидроцилиндра.
Прибор 8 выполнен в виде качающегося рычага 25 с контактным датчиком 26. Привод качания рычага 25 выполнен в виде гидроцилиндра 27, соединенного с осью качания рычага 25 через реечную передачу 28.
Револьверная головка работает следующим образом.
В исходном положении шпиндель 3 находится в фиксированном угловом положении с помощью грибка 2. Поворачивают корпус 1 до выхода план-суппорта 7 в позицию обработки. При этом захват 23 заходит под головку грибка 2. Отводят фиксатор 17 с помощью механизма 21, создавая давление в бесштоковой полости гидроцилиндра,
шток которого опускает, например, скобу с фиксатором 17.С помощью двигателя 11 через коническую передачу 12, шариковинтовую передачу 13 перемещают каретку 14
влево. Перемещение каретки 14 контролируется с помощью датчика 29 (например, индуктосина). Палец 15 проходит через окно в трубе 4 и входит в отверстие кронштейна 16. Датчик 29
дает команду на выключение двигателя 11. Снимая давление в бесштоковой полости гидроцилиндра механизма 21, фиксируют палец 15 относительно кронштейна 16 фиксатором 17. Перемещают
каретку 14 вправо. Вместе с ней перемещаются палец 15, фиксатор 17 с кронштейном 16 и скалка 18 с гайкой пары 20, что вызывает поворот винта пары 20 и радиальное перемещение
реэца 9 на план-суппорте 7 на заданный размер. Выключают двигатель 11. С помощью гидроцилиндра 27 опускают датчик 26 до контакта его с резцом 9, после чего по команде датчика
26 выключают гидроцилиндр 27. По сигналу с датчика 26 УЧПУ станка вычисляет отклонение вершины резца от заданного размера и после подъема датчика 26 дают команду на двигатель J 1 для перемещения каретки 14,необходимого для компенсации указанного отклонения. С помощью привода 24 поднимают захват 23 с грибком 2 и расфиксируют
шпиндель 3. Шпиндель 3 с план-суппортом 7 получает вращение от привода (не показан) через шестерню 30. Осуществляют обработку детали плансуппортом 7. .
| Модзелевский А.А., Соловьев А.В | |||
| Лонг В.А | |||
| Многооперационные станки | |||
| М., Машиностроение, 1981, рис | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
