Изобретение относится к областям астрономии и астрофизики и может найти широкое применение в установках управления телескопами и гелиостатами.
Целью изобретения является повышение точности системы за счет компенсации влияния центробежного возмутдаищего момента, возникающего при повороте объекта регулирования.
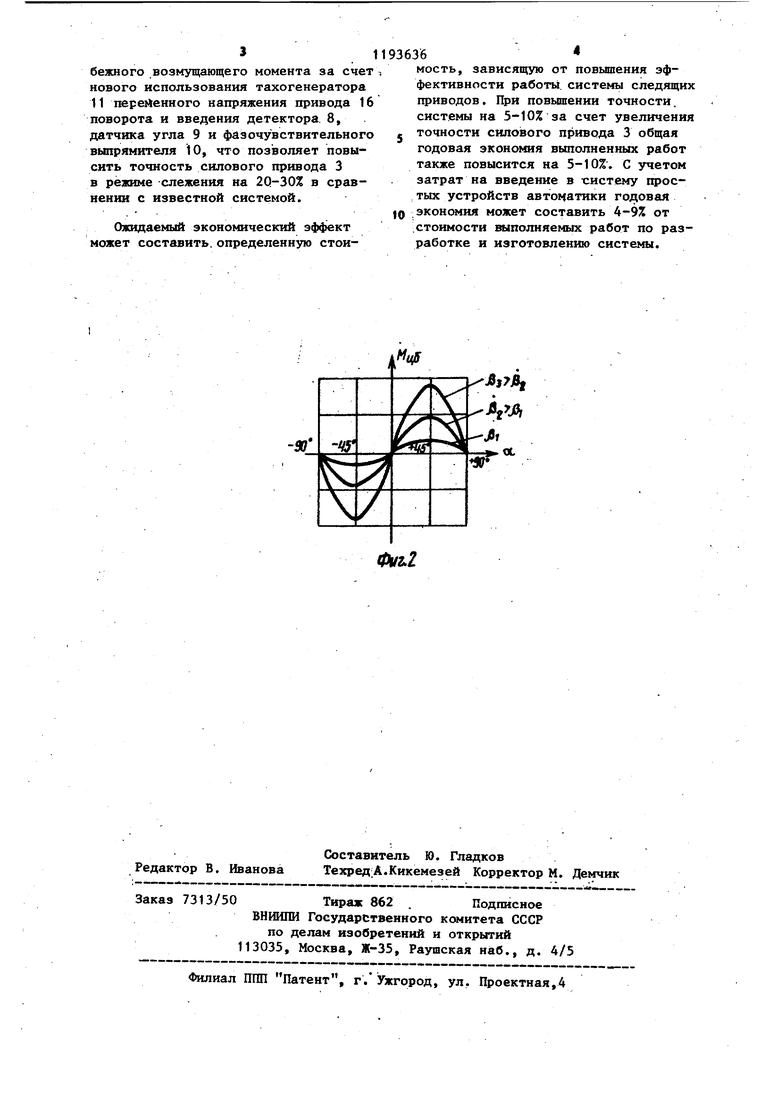
На фиг.1 приведена функциональная схема системы, на фиг.2 - графики изменения центробежного возмущающего момента в зависимости от угла наклона объекта регулирования при различных скоростях его поворота.
Следящая система содержит первьй сумматор 1, первый усилитель 2, первый силовой привод 3, первый датчик 4 угла, поворотное 5 и наклонное 6 устройства объекта регулирования, детектор 8, третий датчик 9 угла, фазочувствительный выпрямитель 10, тахогенератор 11, первый и второй задатчики 12 и 13, второй сумматор 14, второй усилитель 15, второй силовой привод 16, второй датчик 17 угла, элемент 18 сравнен: я, элемент 19 суммирования.
На фиг. 2 введены следующие обоначения: 1); - выходной сигнал i -го функционального блока,oi - угол поворота объекта регулирования 7, угол наклона объекта регулирования 7, Мqg - момент центробежный р значения угловой скорости.
В состав сзпф атора 1 входят элементы сравнения 18 и суммирования 1
I.
В качестве третьего датчика 9
угла может быть использован четырехполюсный бинусно-косинусный вращаю.щийся трансформатор.
В качестве тахогенератора 11 используется тахогенератор переменног напряжения.
Детектор В имеет квадратичную характеристику .
Система работает следующим образом.
Сигналы задания U, и Ui поступают с выходов задатчиков 12 и 13 на первые входы сумматоров 1 и 14, вторые входы которых поступают сигналы главных обратных связей U|,U| с выходов датчиков 4 и 17 угла. На выходах сумматоров формируются сиг3636
налы И и рассогласования, которые, проходя через усилители 2 и 15 и силовые приводы 3 и 16, преобразуются в углы поворота /3 и ы наклонного и поворотного устройств 6 и 5 объекта 7 регулирования, которые фиксируются датчиками угла 4 и 17.
Кроме того, при отработ.ке сигнала задания поворотным устройством 5
0 на выходе тахогенератора 11 форми.руется сигнал U,, (1щ ni где 5 - частота напряжения питания. Up- амплитуда сигнала, пропорциональная скорости вращения объекта 7
5 в горизонтальной ппоскости, пропорциональной скорости поворота поворотного и наклонного устройств 5 и 6 в горизонтальной плоскости. Выходной сигнал «4( тахогенератора 11
0 поступает на вход детектора 8, на выходе которого формируется сигнал Ил и Л поступающий в цепь возбуждео ч «
ния датчика 9 угла. В качестве датчика 9 угла используется четы5 рехполюсный синусно-косинусный
вращающийся трансформатор, на выходе которого формируется сигнал I 5 по закону и,, U,-9in 2 . Выходной сигнал датчика 9 угла поступает на
Q вход фазочувствительного выпрямителя 10, на выходе которого формируется сигнал и,о /U,, Ч1П 2/% /, который поступает на третий вход сумматора 1, в котором суммируется с сигналом и (g . Причем для получения сигнала, пропорционального квадратичной составляющей скорости поворота объекта 7 регулирования без учета знака скорости, т.е. пропорционально модулю этой скорости, в качестве опорного напряжения фазочувствительного выпрямителя 10 используется выходной сигнал ll тахогенератора 11.
Таким образом, выхбдной сигнал U)0 фазочувствительного выпрямителя 10 является компенсационным сигналом центробежного возмущающего момента на наклонное устройство 6 при его повороте в горизонтальной плоскости. Этот сигнал через суммирующий элемент 18 сумматора 1 воздействует на силовой привод 3 наклона объекта 7 регулирования и компенсирует ошибки этого привода, возникающие от
центробежного возмущающего момента. Технический эффект предлагаемой системы заключается в компенсации ошибки привода 3 наклона от центробежного возмущающего момента за счет нового использования тахогенератора 11 переменного напряжения привода 16 поворота и введения детектора, 8, датчика угла 9 и фазочувствительного выпрямителя 10, что поз1воляет повысить точиость силового привода 3 в режиме -слежения на 20-30% в сравнении с известной системой.
Ожидаемый экономический эффект может составить, определенную стои193636
, мость, зависящую от повышения эффективности работы, системы следящих приводов. При повышении точности, системы на 5-10% за счет увеличения . точности силового привода 3 общая годовая экономия выполненных работ также повысится на 5-10%. С учетом затрат на введение в систему простых устройств автоматики годовая экономия может составить 4-9% от стоимости выполняемых работ по разработке и изготовлению системы.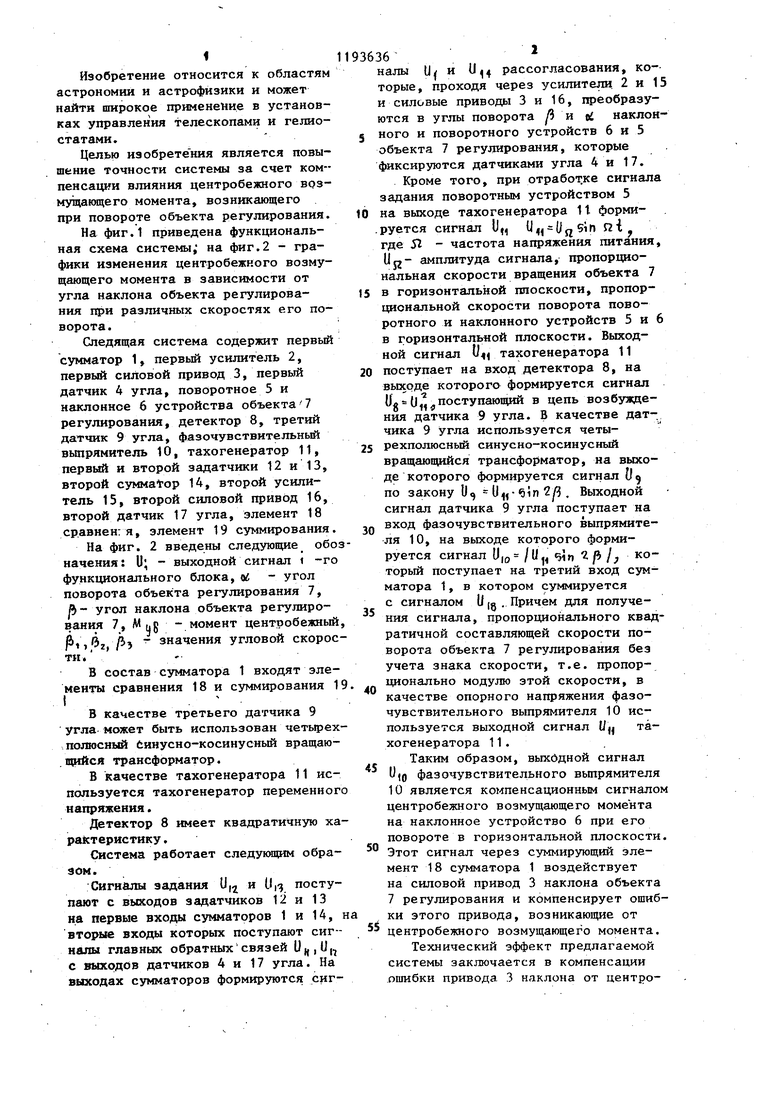
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ПОТОКА ВОДЫ | 1972 |
|
SU357550A1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Гидравлический привод объемного регулирования | 1982 |
|
SU1030588A1 |
ДВУХКАНАЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА, содержащая последовательно соединенные первый задатчик, первый сумматор, первый усилитель и первый силовой привод, выход которого кинематически саединен с первым входом о&ьекта регулирования и входом первого датчика угла, подключенного, выходом к второму входу сумматора, и последовательно соединенные второй задатчик, второй сумматор, второй усилитель и второй силовой привод, выход которого кинематически соединен с вторым входом объекта регулирования, входом-тахогенератора и входом второго датчика угла, подключенного выходом к второму входу второго сумматора, о т л и.ч а ющ а я с я тем, что, с целью повышения точности, в ней дополнительно установлены последовательно соединенные детектор, третий датчик угла и фазочувствительный выпрямитель, подключенньй вторым входом к выходу тахогенератора и входу детектора, а выходом - к третьему входу второго сумматора, выход первого силового привода кинематически соединен с вторым входом третьего датчика угла. со 00 0д со 9д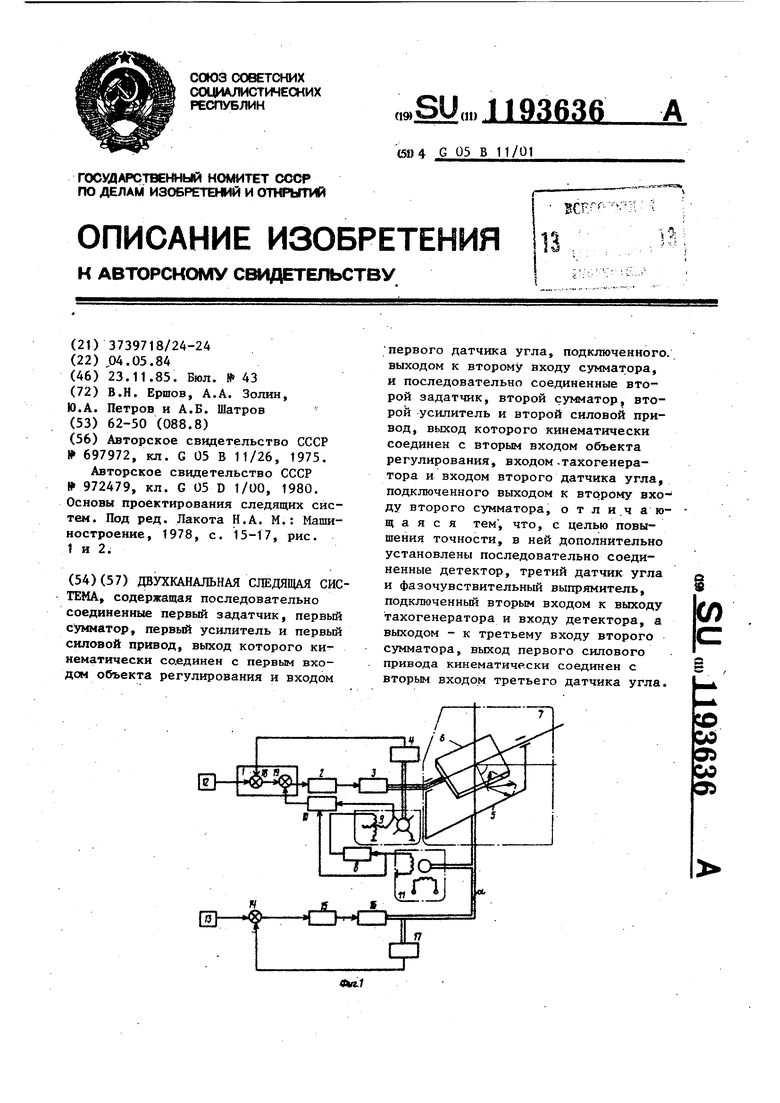
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Основы проектирования следящих систем | |||
| Под ред | |||
| Дакота Н.А | |||
| М.: Машиностроение, 1978, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
