Изобретение относится к приборо строительной промышленности и може найти применение в промьшшенных роботах для транспортировки и сбор ки, например металлических деталей с пластмассовыми. Целью изобретения является расширение функциональных возможносте схвата за счет выполнения им опера ции соединения переносимых деталей На фиг. 1 показан схват, общий вид; на фиг. 2 - детали в сборе. Схват содержит корпус 1, обмотку 2 катушки на каркасе 3, сердечник 4, один торец которого жестко связан со штоком 5 и подпружинен относительно корпуса 1 пружиной 6 при помощи шайбы 7 ирегулировочного винта 8. На втором торце серд ника 4 выполнен паз для формовки крепежного элемента. Обмотка 2 через управляющий контакт 9 подключе к источнику 10 постоянного тока. Корпус 1 размещен на конечном звене 1 1 (руке) робота, которое свя.зано с приводом 12. На корпусе 1 при помощи «держателя 13 закреплен датчик 14 конечного положения. Деталь для сборки содержит пластмасс вьй вкладьш 15 с крепежным элементом, выполненным в виде цилиндричес кого выступа 16, входящего в круглый паз металлической обоймы 17. Пластмассовый вкладыш 15 расположен на опорной плоскости 18. Устройство работает следующим об разом. В исходном положении контакт 9 разомкнут, сердечник 4 находится в .верхнем положении. При помощи привода 12 рука 11 робота перемещает электромагнит к месту нахождения металлической обоймы 17. При этом контакт 9 замыкается и с источника 10 на обмотку 2 подается TOKj при этом сердечник 4 втягивается в полость каркаса 3 до нижнего упора, его торец располагается на уровне нижнего торца корпуса 1. При этом сердечник 4 намагничивается и нагревается. При соприкосновении намагниченного сердечника 4 и обоймы 17 последняя захватывается, перемещается и устанавливается на пластмассовый вкладыш 15, находящийся в заданном месте опорной плоскости 18. При этом приводом 12 электромагнит перемещается на расстояние Н до упора. Выступ 16 вкладыша 15 упирается в сердечник 4 и смещает его на расстояние R. При соприкосновении с выступом 16 сердечник 4 разогревает его и по мере размягчения выступа деформирует его в соответствии с формообразующей поверхностью торца. При этом сердечник 4 по мере размягчения выступа. 16 смещается на расстояние h до исходного состояния. Шайба 7 давит на контактный датчик 14, который срабатывает и соответствующий сигнал с его выхода сигнализирует о завершении развальцовки крепежного элемента. Контакт 9 размыкает цепь питания обмотки 2,-сердечник 4 размагничивается и отпускает обойму 17. Пружиной 6 сердечник 4 перемещается в исходное положение. Цикл повторяется. При помощи винта 8, т.е. натяжения пружины 6 подбирается оптимальньй режим нагрева и формовки давлением крепежного элемента 16 вкладыша 15.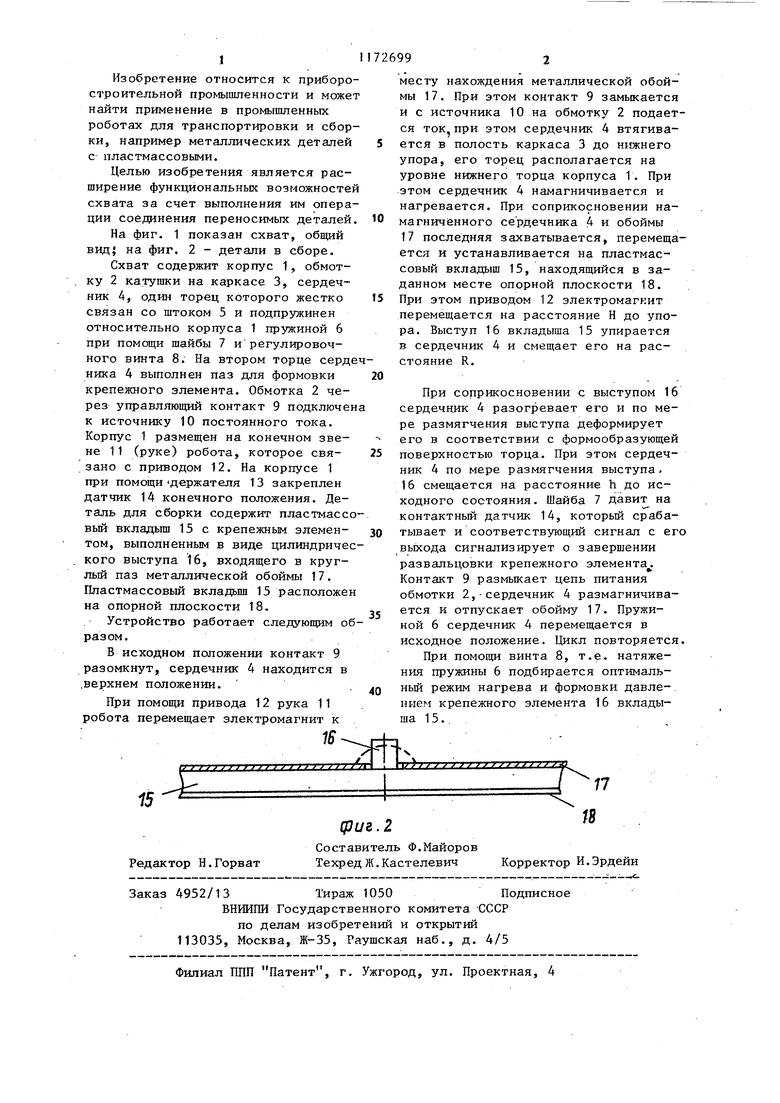
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1313706A1 |
| Электромагнитный схват | 1984 |
|
SU1288055A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват | 1986 |
|
SU1313700A1 |
ЭЛЕКТРОМАГНИТНЫЙ СХВАТ, содержащий обмотку, установленную на корпусе, и сердечник, размещенфиг,1 ный в корпусе внутри обмотки, отличающийся тем, что, с целью расширения технологических возможностей путем осуществлениясоединения захватьшаемых деталей, на торце сердечника выполнен паз для формовки головки крепежного элемента, при этом сердечник свободно установлен в корпусе и подпружинен к нему.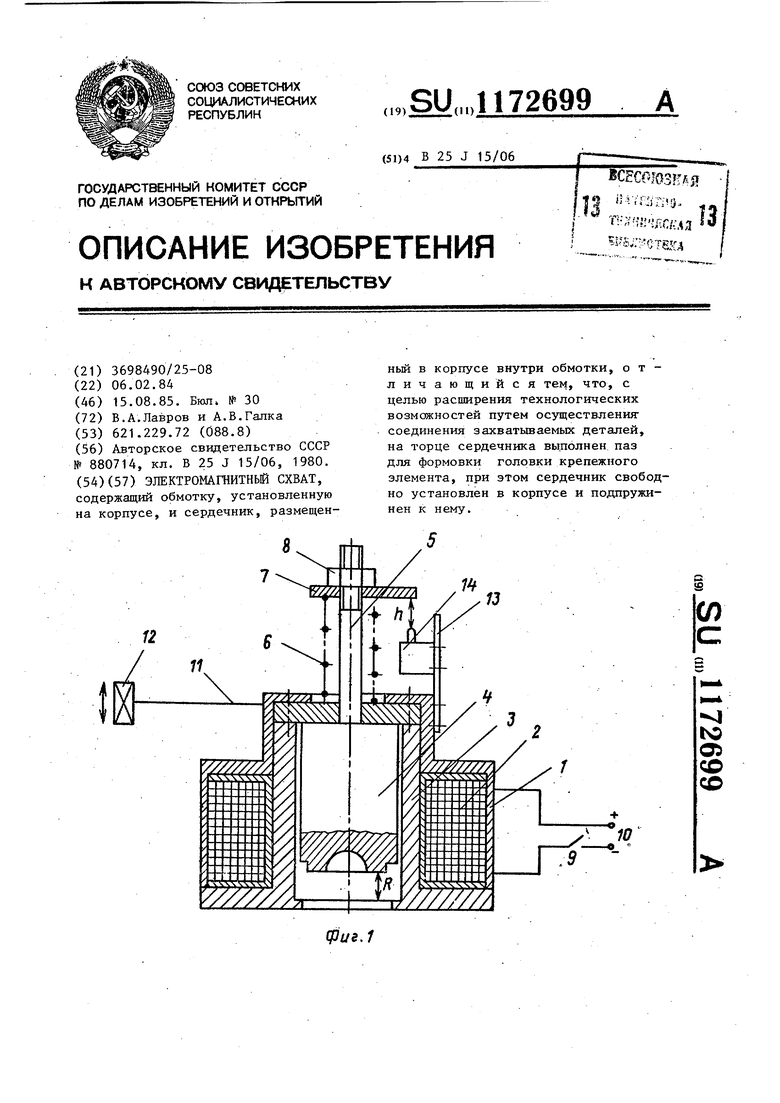
| Электромагнитный захват | 1980 |
|
SU880714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
