Изобретение относится к промыиГленному транспорту, а именно к вертикальным конвейерам.
Целью изобретения является упрощение конструкции и расширение тех- 5 нологических возможностей путем обеспечения погрузки-разгрузки ца одном уровне.
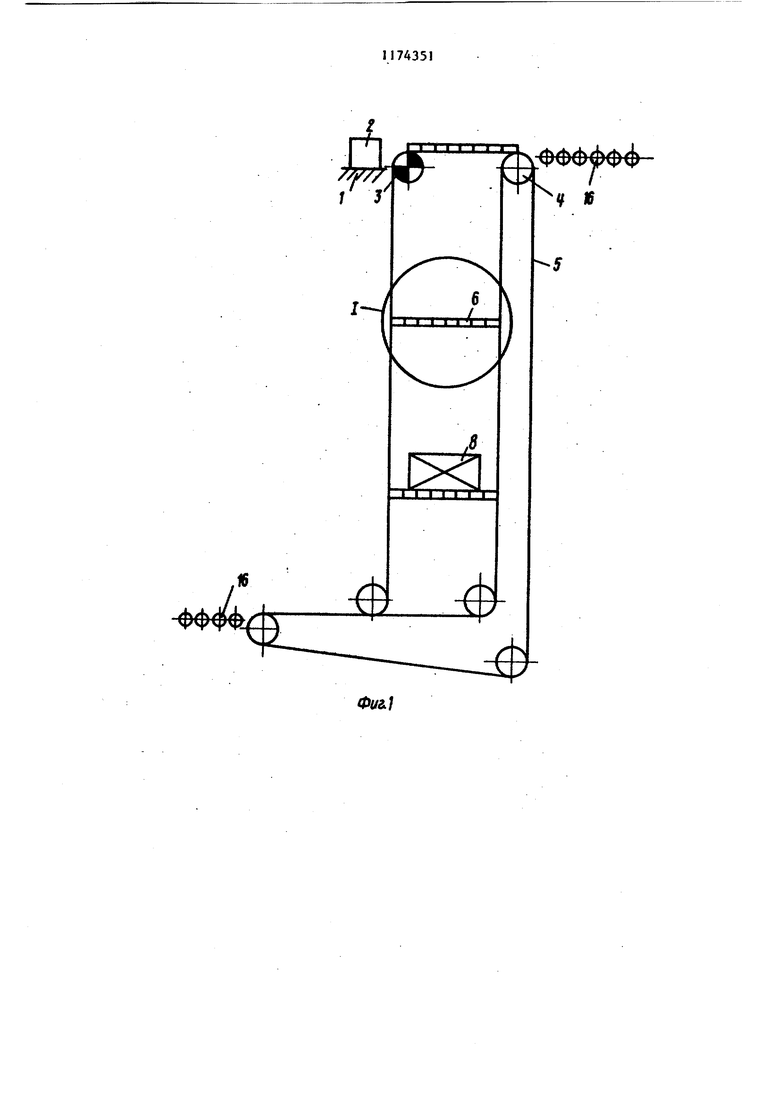
На фиг. 1 изображен вертикальный конвейер, общий вид; на фиг. 2 узел 1 на фиг. J грузонесущая платформа с приводом вращения роликов.
Конвейер содержит раму 1, на которой установлены привод 2, приодные и отклоняющие звездо.чки 3 15 4 с обхватывающими их двумя парами бесконечно замкнутых ТЯЕГОВЬГХ цепей 5. К тяговьм цепям 5 прикреплены гибкие грузонесущие платформы
6с вращающимися опорньми роликами 20
7для груза 8.
Привод опорных роликов 7 выполнен в виде шарнирно закрепленного на раме 1 рычага 9 с механизмом 10 подъема и приводными фрикционными, 25 дисками 11, расположенными с возможностью взаимодействия с опорными роликами 7 грузонесущих платформ 6.. Привод дисков 11 осуществляется от электродвигателя 12 посредством цеп- 30 ной передачи 13. Элементы управления приводом опорных роликов 7 выполнены в виде концевого выключателя 14, установленного на раме 1 и включен-с кого в цепь питания привода опор- 35 ных роликов 7 и механизма 10 подъема и упоров 15, закрепленных на грузонесзшщх платформах 6 с возможг . костью взаимодействия.с концевым выключателем 14. Привод опорных 40 роликов 7 установлен на конечных концевых згчастках горизонтальных петель тяговых цепей 5 в местах
огибания звездочектяговыми цепями. Там же смонтированы погрузочно-раз- грузочные рычаги 16.
При подходе грузонесущей платформы 6 к участку погрузки на концевом участке горизонтальной петли упор 15 через концевой выключатель 14 включает электродвигатель 12 и механизм 10 подъема рычага 9, обеспечивая приведение во вращение дисков П и их контакт с опорными роликами 7. В начальный момент времени во вращении приводится только три опорных ролика 7 грузонесущей платформы 6. Одновременно груз 8 с погру- : зочногр рольганга 16 подается к грузонесущей платформе 6, занимающей крайнее положение на горизонтальной петле конвейера. Вращающиеся три крайних опорньпс ролика 7 захватывают груз 8 и начинают перемещать его по грузонесущей платформе 6. По мере движения грузонесущей платформы 6 автоматически происходит последовательная передача вращения с дисков I1 на последующие опорные ролики 7, при этом груз 8 устанавливается на грузонесущую платформу 6, после чего с помощью упора 15, взаимодействующего на концевой выключатель 14, производится отключение электродвигателя 12 и опускание рычага 9 механизмом 10.
В этом положении груз 8 транспортируется до участка разгрузки. Процесс разгрузки производится аналогично процессу погрузки при включении электродвигателя в противоположную сторону вращения. При необходимости можно производить операцию погрузки-разгрузки на одной горизонтальной петле путем реверсирования электродвигателя.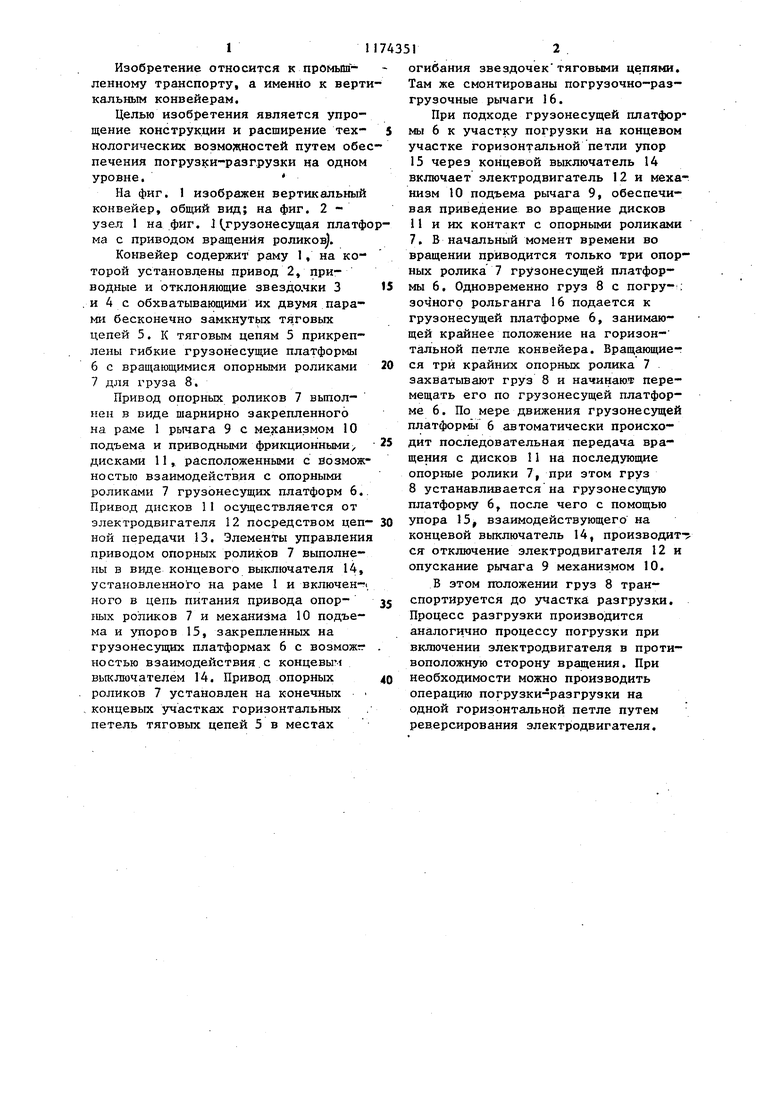
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1257031A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Роликовый конвейер | 1986 |
|
SU1413046A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2333879C1 |
| Устройство для передачи штучных грузов с одного подвесного конвейера на другой | 1975 |
|
SU607764A1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
ВЕРТИКАЛЬНЬШ КОНВЕЙЕР, содержащий раму с установленными на ней приводными и отклоняющими звездочками, две пары тяговых цепей, образующие вертикальный участок и горизонтальные петли, гибкие грузо- несущие платформы с установленными на них опорными роликами для груза, привод вращения опорных роликов при погрузке-разгрузке и элементы управления приводом вращения опорных роликов, отличающийся тем, что, с целью упрощения конструкции и расширения технологических возможностей путем обеспечения погрузки-разгрузки на одном уровне, привод вращения опорных роликов установлен на концевых участках горизонтальных петель тяговьк цепей в местах огибания звездочек тяговыми цепями и выполнен в виде шарнирно закрепленного на раме рычага с механизмом его подъема и приводными дисками, расположёнными с возможi ностью взаимодействия с опорными роликами гибких грузонесущих плат СЛ форм, а элементы управления приводом вращения опорных роликов выполнены в виде концевого выключателя, связанного с механизмом подъема рычага, и упоров, закрепленных на гибких грузонесущих платформах с возможностью взаимодействия с концевым выключателем. 4 00 СП
r i I I I I 41 I
| Патент США № 3759364, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Вертикальный конвейер | 1975 |
|
SU601200A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
