Изобретение относится к механизации погрузочно-разгрузочных работ - кантования контейнеров с длинномерными тяжелов.есными грузами.
Цель изобретения - расширение технологических возможностей устройства.
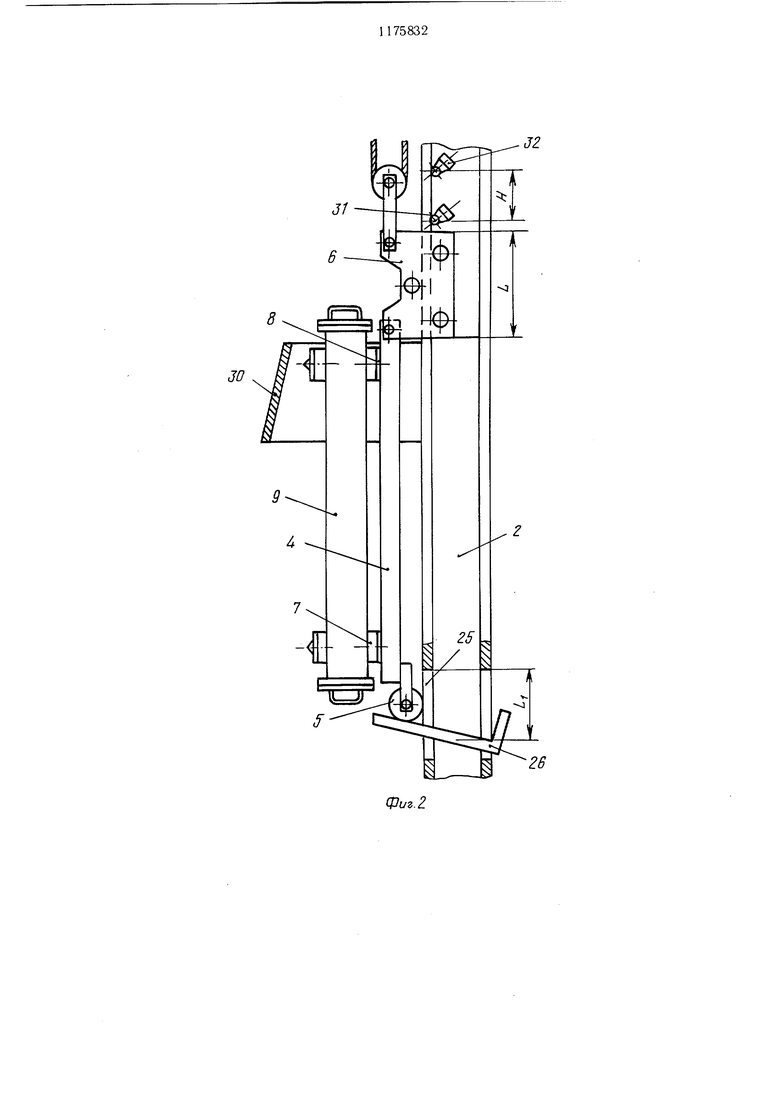
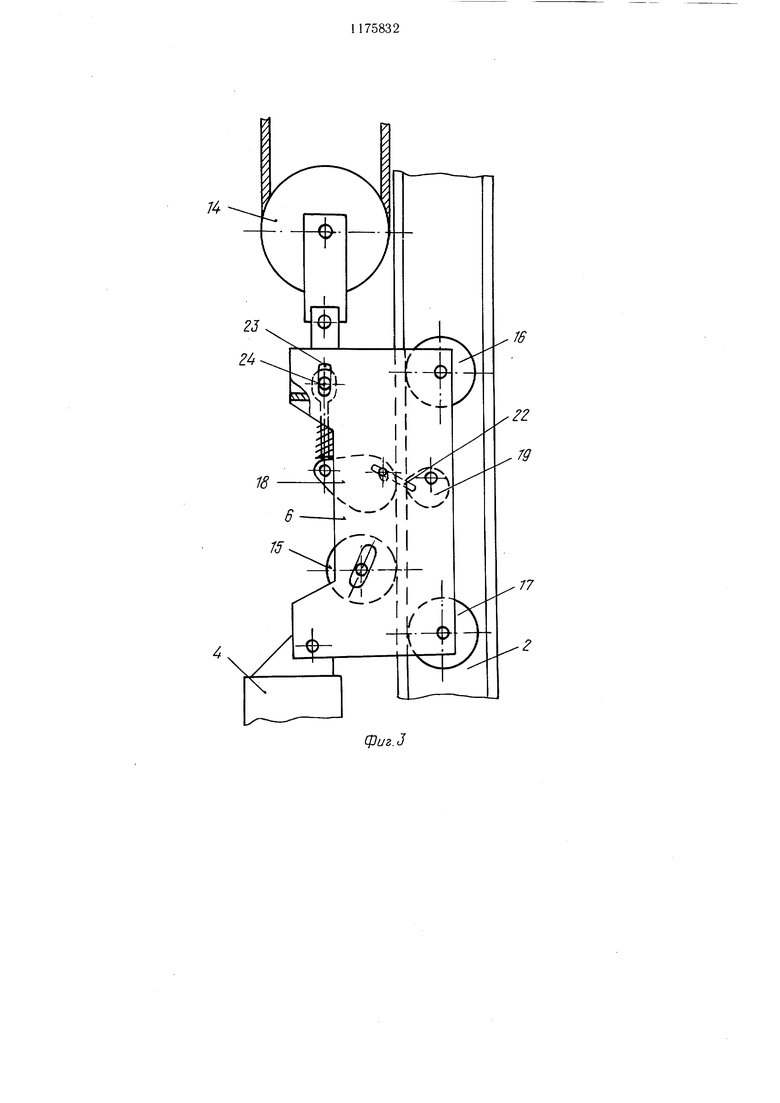
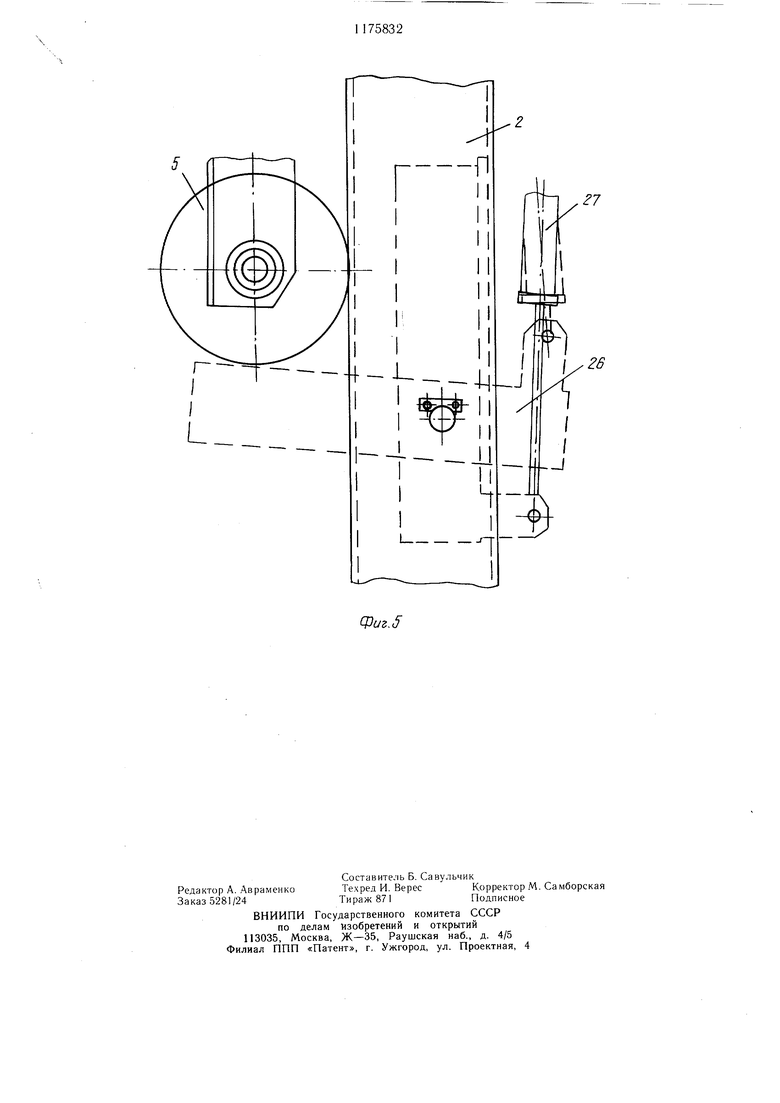
На фиг. 1 схематично изображено устройство, общий вид; на фиг. 2 - то же, подъем контейнера; на фиг, 3 - каретка с тормозом, вид сбоку; на фиг. 4 - то же, вид спереди; на фиг. 5 - упоры.
Устройство для кантования контейнеров содержит основание 1, на котором закреплены вертикальные направляюплие 2, плавно сопряженные с горизонтальными направляюш,ими 3, на которых смонтирована с возможностью перемещения грузонесущая рама 4 на двух опорных катках 5. Грузонесущая рама 4 шарнирно соединена к каретке 6 и снабжена узлами 7 и 8 крепления контейнера 9. Каретка 6 размещена на вертикальных направляющих 2 с возможностью возвратно-поступательного движения вверхвниз с помощью привода 10 гибкой связи 11 и системы блоков 12, 13, 14 и снабжена опорными катками 15, 16 и 17 и тормозом в виде четырех эксцентриков, два из которых 8 размещены в корпусе каретки 6 с одной стороны направляющих, а два других 19 на противоположной стороне вертикальных направляющих 2. Эксцентрики 18 снабжены пружинами 20 и через тяги 21 соединены с блоком 14 и гибкой связью 11 и с помощью рычагов 22 с эксцентриками 19. Ход тяги 21 ограничивается эллипсовидным отверстием 23, в котором размещена поперечная ось 24 тяг 21. В нижней части вертикальных направляющих 2 выполнены прорези 25, в которых размещены упоры 26 (рабочее состояние 5-7° к горизонтальной оси), соединенные с гидроцилиндрами 27 и конечный выключатель 28, взаимодействующий с тормозом 29 привода гибкой связи 11. В верхней части вертикальных направляющих 2 выполнено ограждение 30, предотвращающее падение контейнера 9 с грузонесущей рамы 4 и два конечных выключателя 31 и 32. Выключатель 31 взаимодействует с системой сжатого воздуха и с гидроцилиндрами 27, а выключатель 32 с выключателем привода 10 и включением обратного хода привода 10 для реверсирования каретки.
Устройство для кантования контейнеров работает следующим образом.
Контейнер 9 горизонтально укладывается на грузонесущую раму 4 и иа узлах 7 и 8 закрепляется. Установка контейнера 9 с грузонесущей рамой 4 в вертикальное положение осуществляется кареткой 6 с помощью привода 10 гибкой связью 11 через блоки 12, 13 и 14. По сигналу каретка 6 на опорных катках 15, 16 и 17 начинает подъем вверх.
увлекая за собой шарнирно связанную с ней грузонесущую раму 4 с контейнером 9, которая по горизонтальным направляющим 3, жестко закрепленным на основании 1, на катках 5 передвигается в сторону вертикальных направляющих 2, плавно сопряженных с горизонтальными направляющими 3. Катки
5грузонесущей рамы 4 движутся по направляющим, последовательно переходя горизонтальный и плавно сопряженные участ0 ки.
При подъеме вверх каретка 6 с грузонесущей рамой 4 и контейнером 9 входит в ограждение 30, предотвращающее падение контейнеров 9 с грузонесущей рамы 4 при ненадежном его закреплении к раме 4 и занимают положение между конечным выключателем 31 и выще упоров 26. При дальнейщем движении каретки срабатывает конечный выключатель 31 и дает сигнал на возврат порщня гидроцилиндра 27. Упоры
0 26 поворачиваются и занимают рабочее положение под углом 5-7° к горизонтальной оси. Каретка 6 взаимодействует с конечным выключателем 32, дающим сигнал на прекращение подъема, привод 10 начинает работать на спуск, каретка 6 с грузонесущей рамой 4 опускаются вниз до касания опорными катками 5 упоров и грузонесущая рама 4 с контейнером 9 фиксируются в вертикальном положении для загрузки в контейнер или выгрузки из него. При возвра„ те в горизонтальное положение каретка 6 с грузонесущей рамой 4 по сигналу поднимаются вверх, срабатывает конечный выключатель 32, каретка 6 с грузонесущей рамой опускаются, срабатывают гидроцилиндры 27 на выдвижение щтока, упоры 26 через прорезь 25 становятся вертикально и грузонесущая рама 4 занимает горизонтальное положение, а каретка 6, касаясь конечного выключателя 28, подает сигнал на тормоз 29 остановки и отключения привода 10 и остается на вертикальных направляющих 2.
0 При подъеме каретки 6 с грузонесущей рамой 4 и контейнером 9 пружины 20 в каретке
6находятся в разжатом состоянии на величину смещения оси 24 тяг 21 в эллипсовидном отверстии 23 в корпусе каретки 6 за счет натяжения блока 14.
В случае обрыва гибкой связи 11 или несрабатывании тормоза 29 привода, либо в любом случае отказа привода при ослаблении натяжения блока 14 ось 24 тяг 21 займет нижнее положение в эллипсовидном отверстии 23, пружины 20 передадут усилие на эксцентрики 18, а те, в свою очередь, через рычаги 22 повернут эксцентрики 19 так, что они заклинят каретку на вертикальных направляющих 2 и предотвратят падение грузонесущей рамы 4 с контейнером 9.
16
фиг.З
21
Фиг. 4
/
.26
J
-J
.S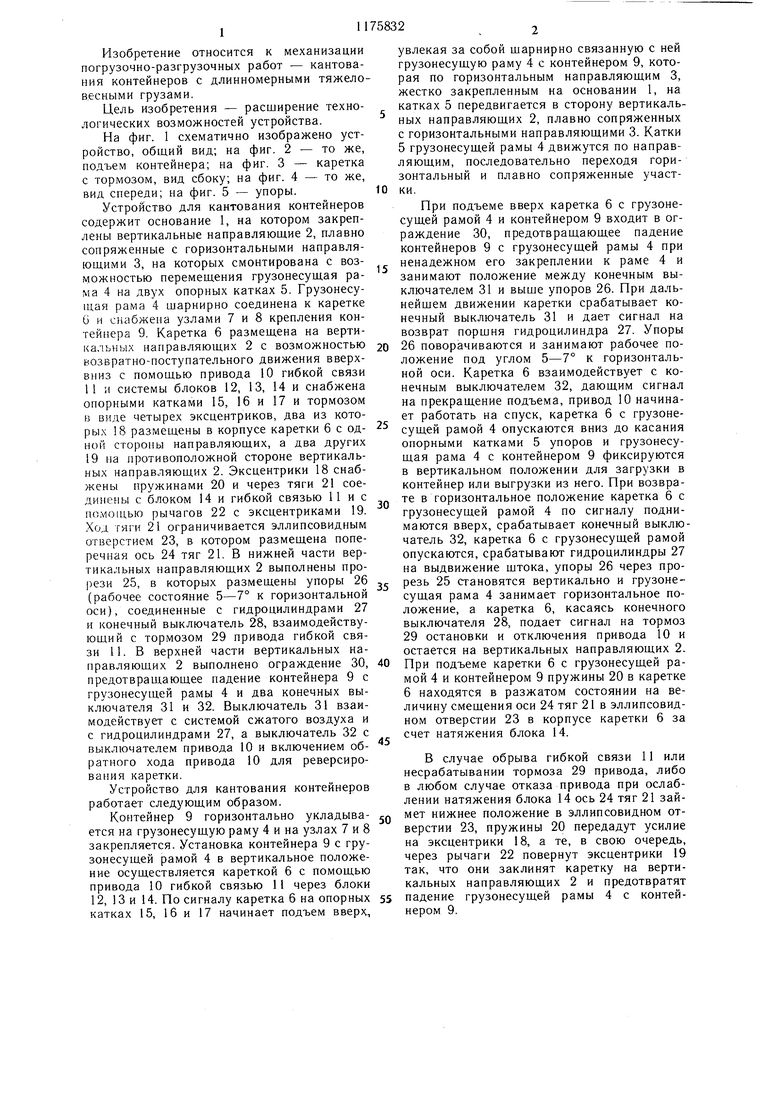
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кантования контейнеров | 1985 |
|
SU1306866A1 |
| Подъемник-кантователь для загруженных солениями емкостей | 1986 |
|
SU1361089A1 |
| Подъемник - кантователь для загруженных солениями емкостей | 1986 |
|
SU1491788A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
| Устройство для перемещения и кантования изделий | 1986 |
|
SU1362693A1 |
| Устройство для кантования контейнеров | 1978 |
|
SU740668A1 |
| Манипулятор | 1985 |
|
SU1265039A1 |
| Устройство для загрузки-выгрузки | 1981 |
|
SU960515A1 |
| Строительный подъемник | 1979 |
|
SU854856A1 |
УСТРОЙСТВО ДЛЯ КАНТОВАНИЯ КОНТЕЙНЕРОВ, содержащее основание, на котором закреплены вертикальные направляющие, плавно сопряженные с горизонтальными направляющими, на которых смонтирована каретка с грузонесущей рамой, привод перемещения каретки с трособлочной системой, и тормоз, отличающееся тем, что, с целью расширения техJO нологических возможностей, каретка соединена с грузонесущей рамой щарнирно, в нижней части вертикальных направляющих выполнены прорези, в которых щарнирно смонтированы упоры, а в верхней части - предохранительное ограждение, верхний и нижний концевые выключатели соответственно для взаимодействия с кареткой, реверсирования ее, и для поворота упоров, при этом указанный тормоз смонтирован на каретке и содержит четыре эксцентрика, два из которых расположены с одной стороны вертикальных направляющих, подпружинены относительно них и соединены указанной трособлочной системой и двумя рычагами с другими эксцентриками, которые смонтированы на противоположной стороне вертикальных направляющих. (Л СП 00 со ю
| Устройство для кантования контейнеров | 1982 |
|
SU1047803A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
