Изобретение относится к машиностроению, а именно к автооператорам для транспортировки заготовок из накопителя в рабочую зону станков типа агрегатных с горизонтальным расположением шпинделей и круговым перемещением стола. Целью изобретения является повышение производительности за счет сокращения вспомогательного времени. На чертеже показана кинематическая схема устройства. Автооператор содержит захват 1, подпружиненный механической рукой 2, толкатель с роликом 3, который взаимодействует с парой рабочих поверхностей на копире 4. На этом же копире имеется вторая пара рабочих поверхностей, с которой взаимодействует толкатель с роликом 5 подпружиненного сталкивателя 6. С механической рукой 2 жестко соединен управляющий механизм 7, содержащий подпружиненный палец 8, толкатели с роликами 9 и 10, ломающийся палец 11. На подпружиненных стержнях 12 жестко закреплены копиры 4 и 13, образуя блок подвижных копиров. Копир 13 имеет пару рабочих поверхностей, взаимодействующих с пальцем 11, и содержит храповой механизм с собачкой 14. Копир 15, отсекатель 16, а также пальцы 17 жестко закреплены на основании оператора. Механическая рука 2 связана через ролик 18 с подпружиненным тросом 19 и через трос 20 - с грузом 21. Автооператор работает следующим образом. В исходном положении толкатель с роликом 9 находится в т. А, ломающийся палец 11 в т. В, толкатель с роликом 3 в т. С и толкатель с роликом 5 в т. D. Подпружинен ный палец 8 скользит по боковой поверхности вращающегося стола станка (не показан), на которой имеются отверстия с направляющими втулками. При попадании пальца 8 в направляющую втулку стола начинается перемещение влево управляющего механизма 7. При этом ролик 9 толкателя начинает перемещаться по направляющему пазу копира 15 (по стрелке), а ломающийся палец 11 и толкатели с роликами 3 и 5 - по соответствующим рабочим поверхностям блока подвижных копиров. В процессе движения пальца 11 по наклонной поверхности дорожки копира 13 происходит опускание блока копиров, поэтому ролики 3 и 5 толкателей взаимодействуют с верхними рабочими поверхностями соответствующих копиров. При этом происходит захват, перенос и сталкивание заготовки на щпиндель станка. При движении ролика 3 толкателя по верхнему профилю копира 4 на участке I происходит захват заготовки, на II участке - перенос заготовки от накопителя к станку, на III - механическая рука 2 подводится к шпинделю станка, захват разжимается и заготовка сталкивается на щпиндель станка. В конце рабочего хода автооператора ролик 9 толкателя приходит в т. Е. Ломающийся палец перемещается по наклонной плоскости копира 13, а блок копиров 13 и 4 перемещается вверх до упора в пальцы 17. При этом ролики 3 и 5 толкателей оказываются на нижних возвратных поверхностях копира 4. При дальнейшем движении влево управляющего механизма 7 ролик 10 толкателя двигается по отсекателю 16. При этом подпружиненный палец 8 выводится из направляющей втулки стола станка, а затем за счет массы груза 21 и подпружиненного троса 19 производится возврат механической руки 2 в исходное положение. При возвратном движении управляющего механизма 7 палец 11 ломается в горизонтальной плоскости на собачке 14 храпового механизма.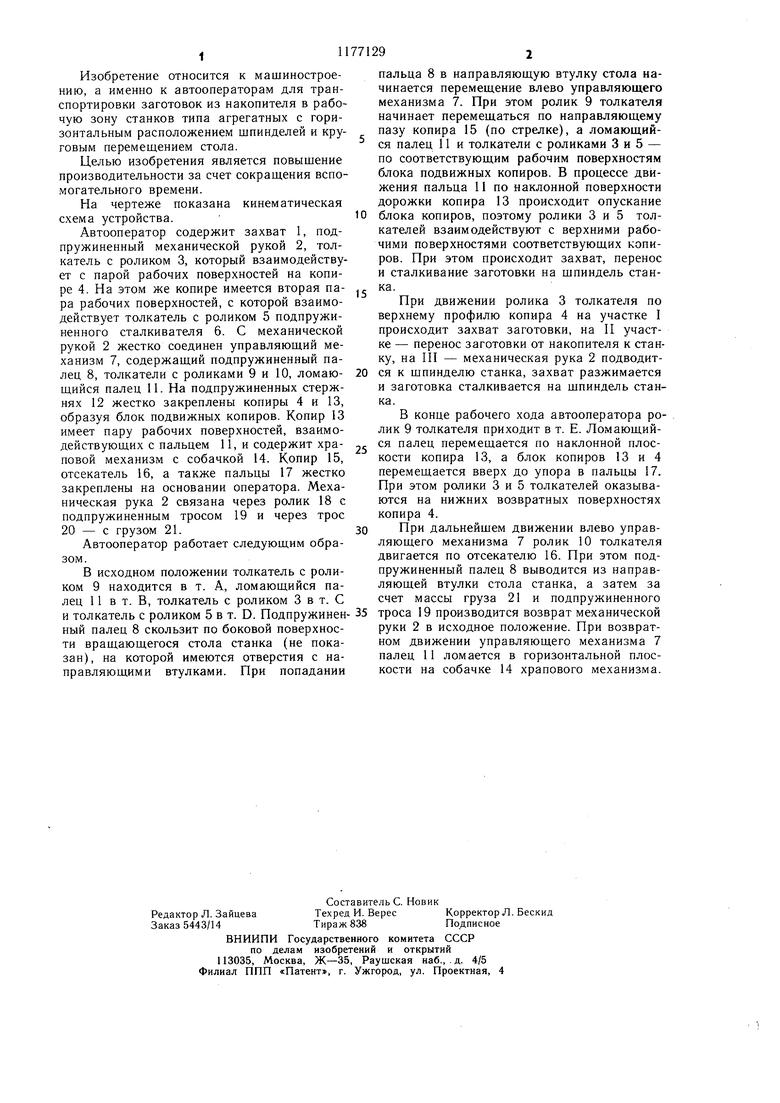
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Станок для нарезания резьбы в гайках | 1987 |
|
SU1414534A2 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Загрузочно-разгрузочное устройство | 1977 |
|
SU667379A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| Загрузочное устройство для токарно-револьверных станков | 1984 |
|
SU1171279A1 |
АВТООПЕРАТОР, содержащий основание, на котором с возможностью перемещения установлен корпус, механическую руку с захватом, расположенную в направляющих корпуса, съемник изделий и программное устройство перемещения руки. / . отличающийся тем, что, с целью повыщения производительности за счет сокращения вспомогательного времени, программное устройство выполнено в виде копира и блока копиров, копир закреплен на основании и взаимодействует с толкателем, жестко связанным с корпусом, а блок копиров снабжен тремя парами рабочих поверхностей, с первой из которых взаимодействует дополнительно введенный и подпружиненный относительно корпуса палец, с второй - толкатель, жестко связанный с рукой, а с третьей - толкатель, жестко связанный со съемником изделий, установленный в соответствующих направляющих корпуса, при этом автооператор снабжен координатными устройствами возврата корпуса в исходное положение. (Л N9 (;о
| Автооператор | 1975 |
|
SU598732A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
