Изобретение относится к машиностроению, а именно к схватам манипуляторов для установки деталей в патронах металлообрабатывающих станков с прижимом к упору патрона.
Цель изобретения - расширение технологических возможностей, путем досылки детали до установочной поверхности.
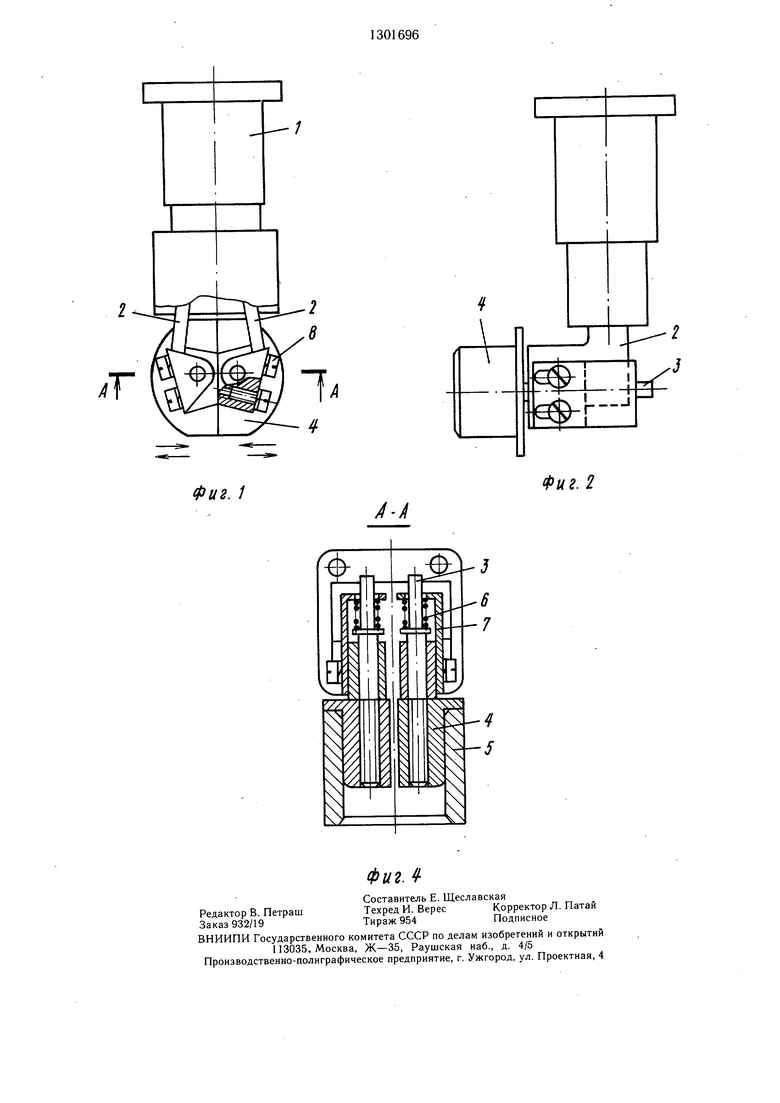
На фиг. 1 представлен схват для захвата за внутреннее отверстие деталей типа втулки, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - то же, при удержании детали в схвате.
Схват содержит расположенный в корпусе 1 привод с зажимными рычагами 2, по направляющим отверстиям которых перемещаются пальцы 3 с установленными на них посредством разъемного соединения, например резьбового, губками 4 с. буртиками. Для захвата детали 5 служат боковые поверхности губок. Пружины 6, обеспечивающие подпружиненное состояние зажимных губок 4, предварительно сжаты, одним торцом опираются на поясок пальцев 3, другим - на уголки 7, установленные на рычагах 2. Смещением уголков 7 регулируется усилие сжатия пружин 6. Фиксирование положения уголков 7 обеспечивается винтами 8.
Между обращенными одна к другой плоскостью губок 4 и плоскостью рычагов 2 устанавливается зазор, выбираемый при сжатии пружин 6 и достаточный для компенсации погрещности изготовления детали 5 по высоте (длине). Для захвата за внутреннее отверстие деталей типа втулки буртики зажимных губок обращены наружу; зажимное усилие от механизма зажима обеспечивается при разведении губок 4. Для захвата по наружной поверхности деталей типа цилиндра производится смена зажимных губок; буртики губок обращены внутрь для упора в торец детали; зажимное усилие обеспечивается при сведении губок. Конструкция привода, обеспечивающая сведение и разведение губок 4, может быть произвольной.
Выбор пружин 6 по усилию сжатия определяется требуемой силой прижима детали к упору патрона станка и допустимой нагрузкой на схват манипулятора. Усилие зажима детали рассчитывается из условия
надежного удержания детали при сжатых пружинах схвата во время ее транспортировки.
Схват работает следующим образом.
Выдаваемая из загрузочного устройства робототехнологического комплекса деталь 5 устанавливается в позиции загрузки на расстоянии, на величину хода пальцев 3 в схвате меньщем хода рабочего органа манипулятора при взятии детали. При подведеНИИ схвата к детали 5 от упора детали в буртики губок 4 происходит перемещение пальцев 3 с губками 4 в рычагах 2 и сжатие пружин 6. Захват детали 5 осуществляется разведением (или сведением для детали типа цилиндра) губок 4 при передаче через рычаг 2 от механизма зажима зажимного усилия. При этом происходит заклинивание (торможение вследствии сил трения) пальцев 3 в рычагах 2.
Далее деталь 5 в схвате транспортируется от загрузочного устройства к станку и устанавливается в его патроне: расстояние от упора патрона станка до торца детали не более хода пальцев 3 в схвате (обеспечивается при налад-ке робототехнологического комплекса). При снятии усилия зажима детали 5 пружины 6 обеспечивают перемещение и дожим детали к упору патрона станка, после чего производится зажим детали в патроне станка.
Изобретение позволит обеспечить надежный прижим детали к упору патрона станка, упростить конструкцию схвата манипулятора.
35
Формула изобретения
Схват манипулятора, содержащий зажимные рычаги, в каждом из которых установлено по крайней мере по одному
подпружиненному стержню, и размещенный в корпусе привод перемещения рычагов в направлении, перпендикулярном оси схвата, отличающийся тем, что, с целью расширения технологических возможностей путем до- сЫлки детали до установочной поверхности,
каждый стержень зажимного рычага снабжен губкой с буртом, предназначенным для взаимодействия с деталью.
Фиг. 1
Фиг. 2
/-/
Редактор В. Петраш Заказ 932/19
Составитель Е. Щеславская
Техред И. ВересКорректор Л. Патай
Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи2. 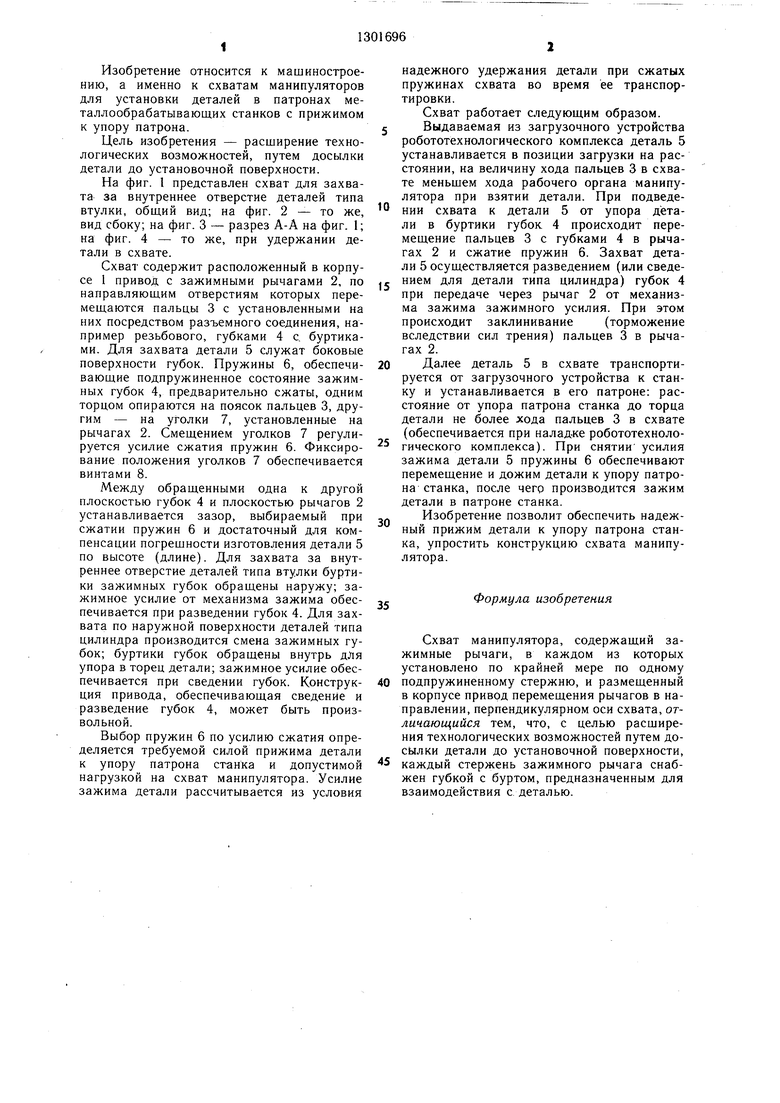
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват | 1984 |
|
SU1184663A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Схват | 1987 |
|
SU1407796A1 |
Изобретение относится к схватам манипуляторов для установки деталей в патронах металлообрабатывающих станков с прижимом к упору патрона. Цель изобретения - расширение технологических возможностей путем досылки детали до установочной поверхности. Схват содержит зажимные рычаги 2, в каждом из которых установлено по крайней мере по одному подпружиненному стержню 3, и размещенный в корпусе 1 привод перемещения рычагов в направлении, перпендикулярном оси схвата, причем каждый стержень 3 зажимного рычага 2 снабжен губкой 4 с буртом, предназна ченным для взаимодействия с деталью. 4 ил. (Л со 05 о Ci . J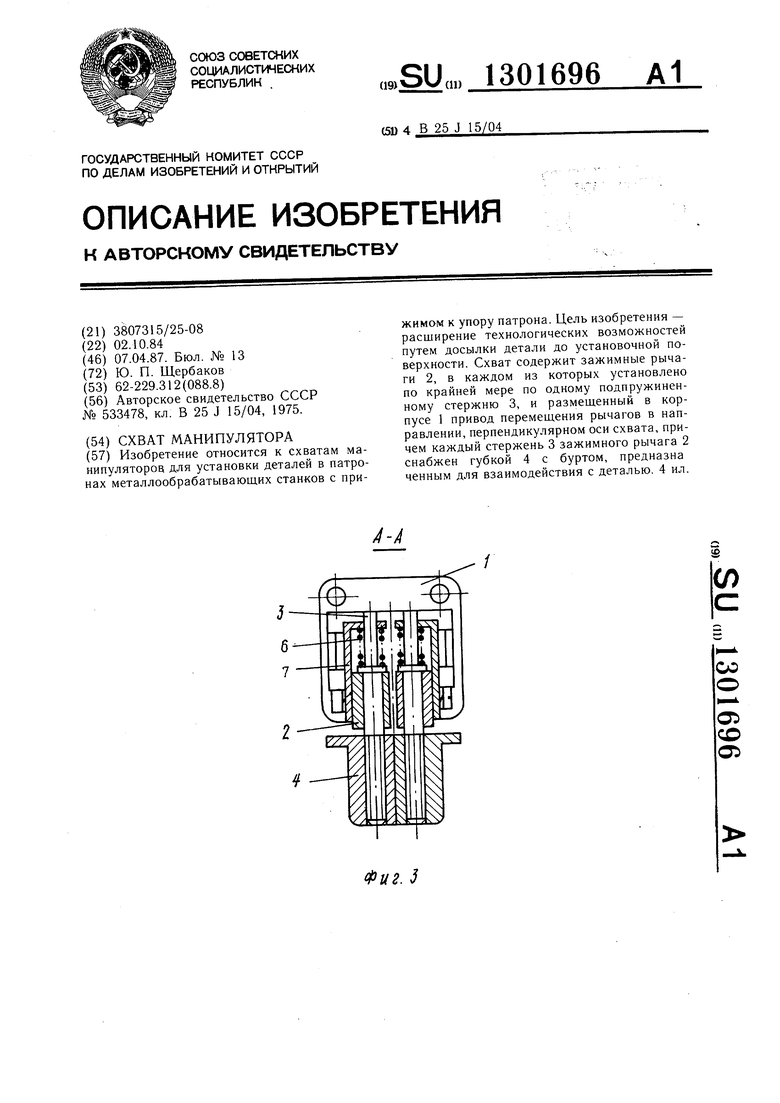
| Схват промышленного робота | 1975 |
|
SU533478A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
