Изобретение относится к области автоматизации технологических процессов обработки деталей, например штамповкой, термообработкой, флюсованием, лужением и т.д. Целью изобретения является повышение надежности работы. На фиг. 1 изображен робототехнологический комплекс; на фиг. 2 - приводы враш,ения; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - технологическая машина; на фиг. 5 - накопитель. Робототехнологический комплекс содержит технологическую машину 1 для флюсования, имеющую ротор 2 с рабочими позициями 3, емкость 4 для флюса 5 и корпус 6 с отверстиями 7, накопители, 8 и 9 с поворотными валами 10, несущими электромагнитные муфты 11 и опоры 12 с кассетами 13 для размещения деталей 14, промышленные роботы 15 и 16 ванну 17 лужения, стол 18, механизм поворота и фиксации ротора 2. Промышленные роботы 15 и 16 имеют колонки 19, связанные с приводом 20 вращения, несущие модули узлов схвата и установления на основании 21. Приводы 20 содержат силовые цилиндры 22, корпуса 23, демпфера 24, оси 25, при помощи которых силовые цилиндры 22 щарнирно закреплены на основании 24, и оси 26, связывающие штоки 27 силовых цилиндров 22 с корпусом 23, закрепленным на колонке 19. Электромагнитные муфты содержат полумуфты 28 с подшипниками 29, полумуфту 30 с подшипниками 31, диски 32. Полумуфты 28 связаны с приводами вращения тросами 33. Модули узлов схватов содержат корпуса 34, несущие штоки 35, установленные с возможностью возвратно-поступательного и вращательного движений, и захваты 36, закрепленные на щтоках 35. Механизм поворота и фиксации ротора 2 выполнен в виде бобышки 37, закрепленной в роторе 2 и имеющей пазы 38, число которых равно числу рабочих позиций 3, и модуля узла схвата, имеющего корпус 39, шток 40 и клин 41, закрепленного на штоке 40 с возможностью взаимодействия с пазами 38. Комплекс снабжен также системой 42 управления. Робототехнологический комплекс работает следующим образом. 1 2JJ В исходном состоянии промышленный робот 15 одним узлом схвата захватывает деталь или заготовку 14 из кассеты 13 накопителя 8, вторым узлом схвата он захватывает отфлюсованную деталь из ротора 2. С помощью привода 20 промышленный робот 15 совершает поворот, при этом один модуль устанавливает заготовку, взятую из кассеты 11 накопителя 8 в ротор 2 а другой совершает рабочее движение в ванне 17 лужения. Далее происходит выдвижение захвата 3 на позицию стола 18, куда устанавливаются отфлюсованные детали после операции лужения. Электромагнитные муфты 11 при этом обесточены и промежуточные диски 32 свободно проворачиваются. Во время поворота робота в обратном направлении на исходную позицию модуль С клином 41 совершает прямолинейное перемещение и выходит из паза 38 бобышки 37, совершает вращение вокруг своей оси на угол, равный углу расположения следующего паза. Затем, линейно перемещаясь, модуль входит клином 41 в следующий паз и таким образом перемещает ротор 2 на следующую позицию. Промыщленный ротор 16 с помощью захвата 35 берет с приемного столика 18 и, поворачивая, устанавливает ее в кассету 13 накопителя 9. При этом привод 20 оставляет накопитель в прежней позиции, так как накопитель 8 аналогичен механизму накопителя 9. В таком режиме комплекс работает до того момента, пока не опорожнится кассета 13 накопителя 8 и не заполнится кассета накопителя 9. Далее система 42 управления выдает сигнал на электромагнитные муфты 11. Между промежуточными дисками 32 возникает момент и они совершают поворот совместно, причем передача вращающего момента осуществляется посредством тросов 33. При достижении захватов 35 следующей позиции муфты обесточиваются, момент на промежуточных дисках 32 становится равным нулю, и комплекс работает в режиме, описанном выще, до тех пор, пока детали уже из следующей кассеты накопителя 8 не наполнят кассету накопителя 9. Далее работа комплекса продолжается в том же режиме.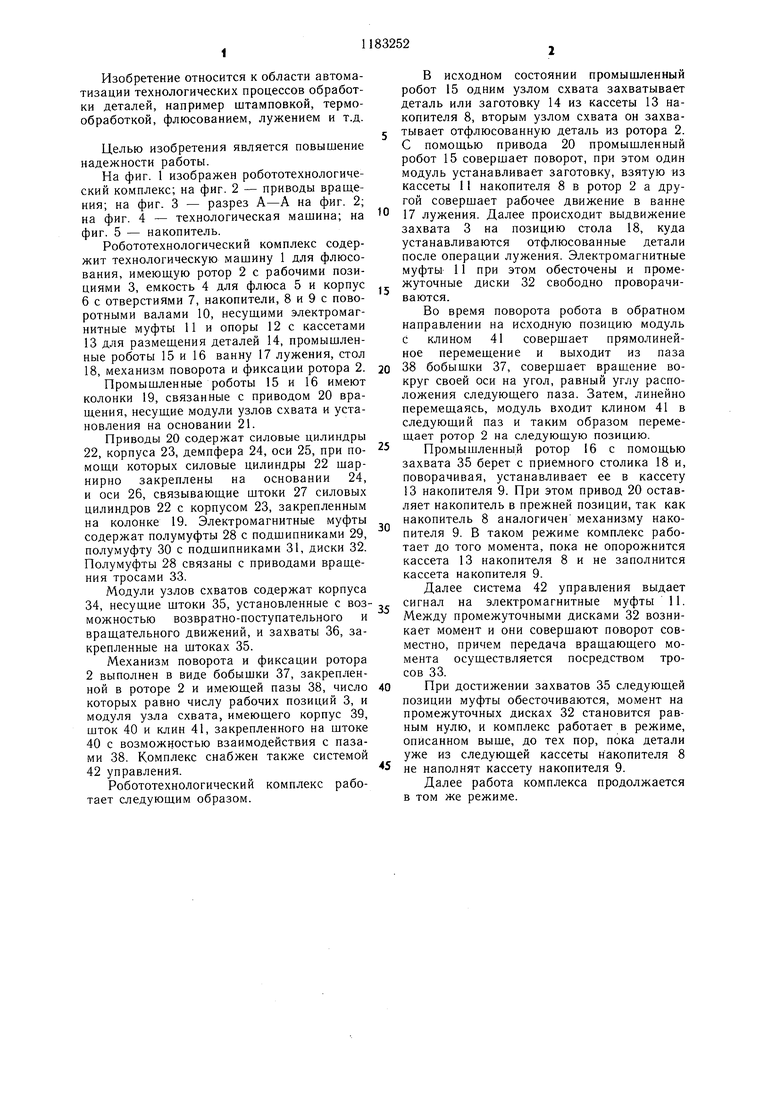
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Линия для подготовки микросхем к монтажу | 1981 |
|
SU1023687A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Линия для изготовления микросборок | 1988 |
|
SU1598241A1 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Загрузочное устройство | 1986 |
|
SU1346394A2 |
| Автомат лужения | 1986 |
|
SU1331622A1 |
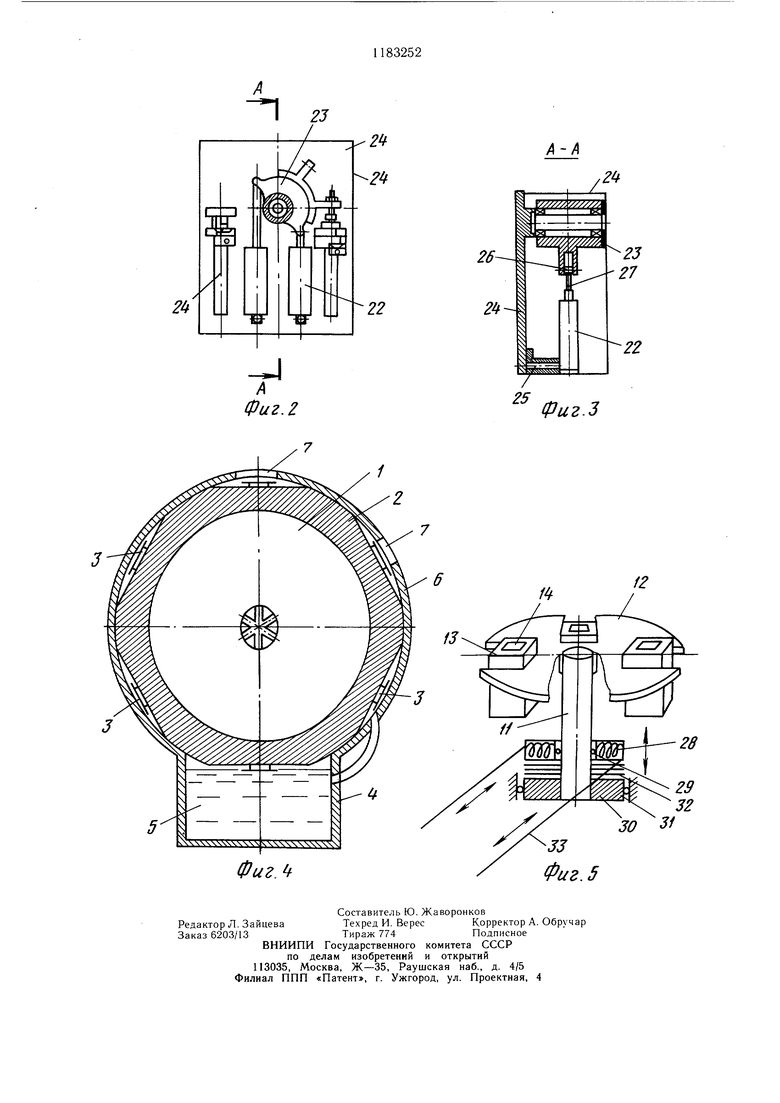
РОБОТОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС, содержаш,ий технологическую машину для обработки деталей, имеюшую ротор с рабочими позициями и механизм поворота и фиксации ротора, накопители с поворотными валами, несущими опоры для размещения деталей, промышленные роботы, имеющие колонки, связанные с приводами вращения и несущие модули узлов схвата деталей, выполненные в виде конусов и штоков, установленных в корпусах с возможностью возвратно-поступательного и вращательного -движений и несущих захваты, отличающийся тем, что, с целью повыщения надежности работы, накопители снабжены электромагнитными муфтами, связанными с поворотными валами и с приводами вращения колонок и электрически соединенными с системой управления, механизм поворота и фиксации ротора выполнен в виде бобышки, закрепленной в роторе и имеющей пазы, число которых равно числу рабочих позиций ротора, дополнительного модуля узла схвата и клина, закрепленного на штоке дополнительного модуля узла схвата с i возможностью взаимодействия с пазами бобышки. (Я 00 GO Ю сд Ю
| Юревич Е | |||
| И | |||
| Корытко О | |||
| Б | |||
| и др | |||
| - л.: Устройство промышленных роботов | |||
| Машиностроение, 1980, с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
| Патент США № 3244294, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
