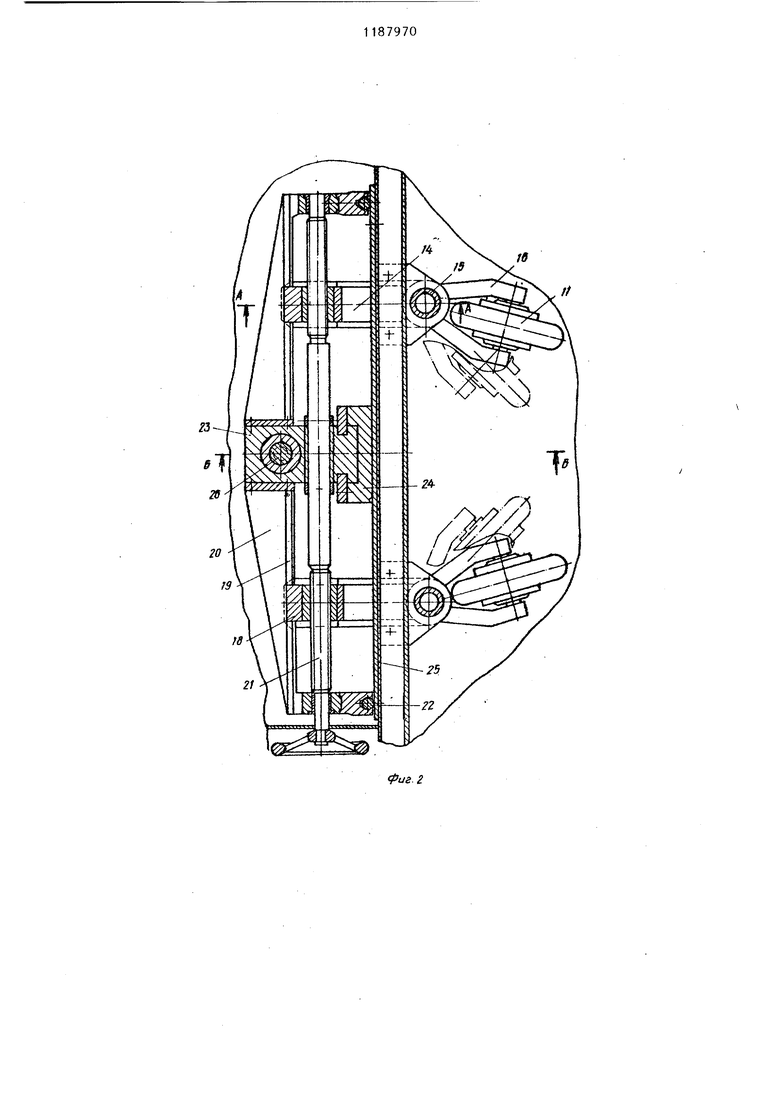
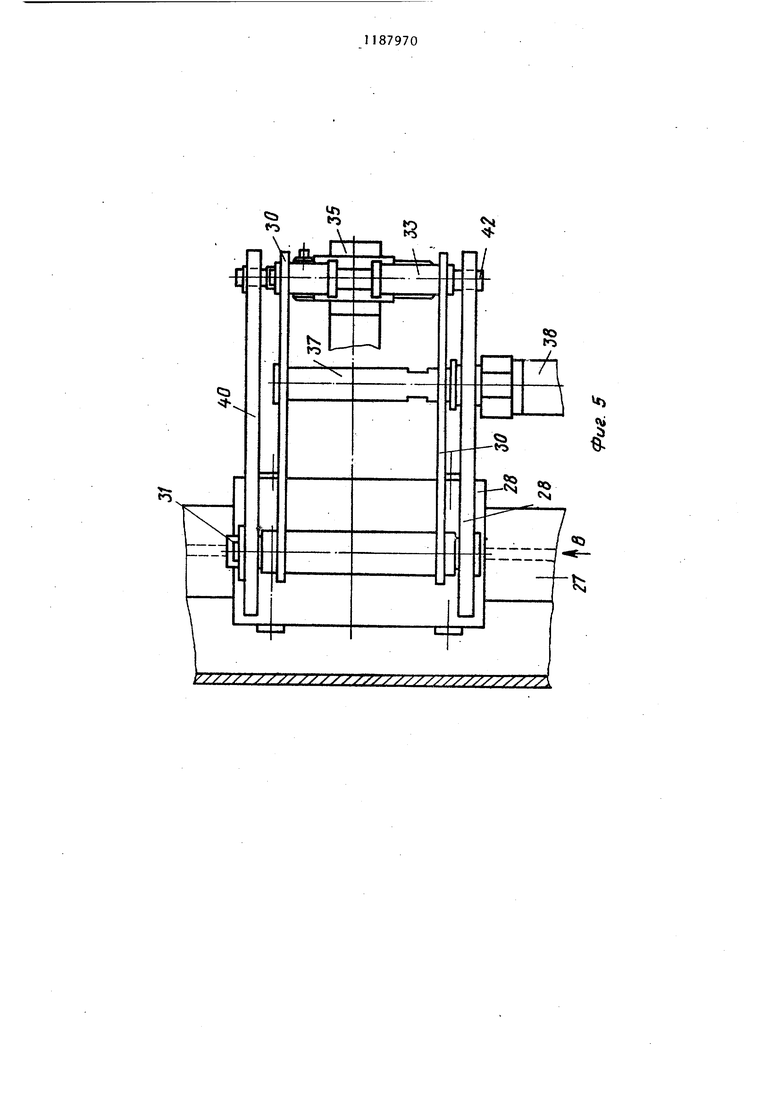
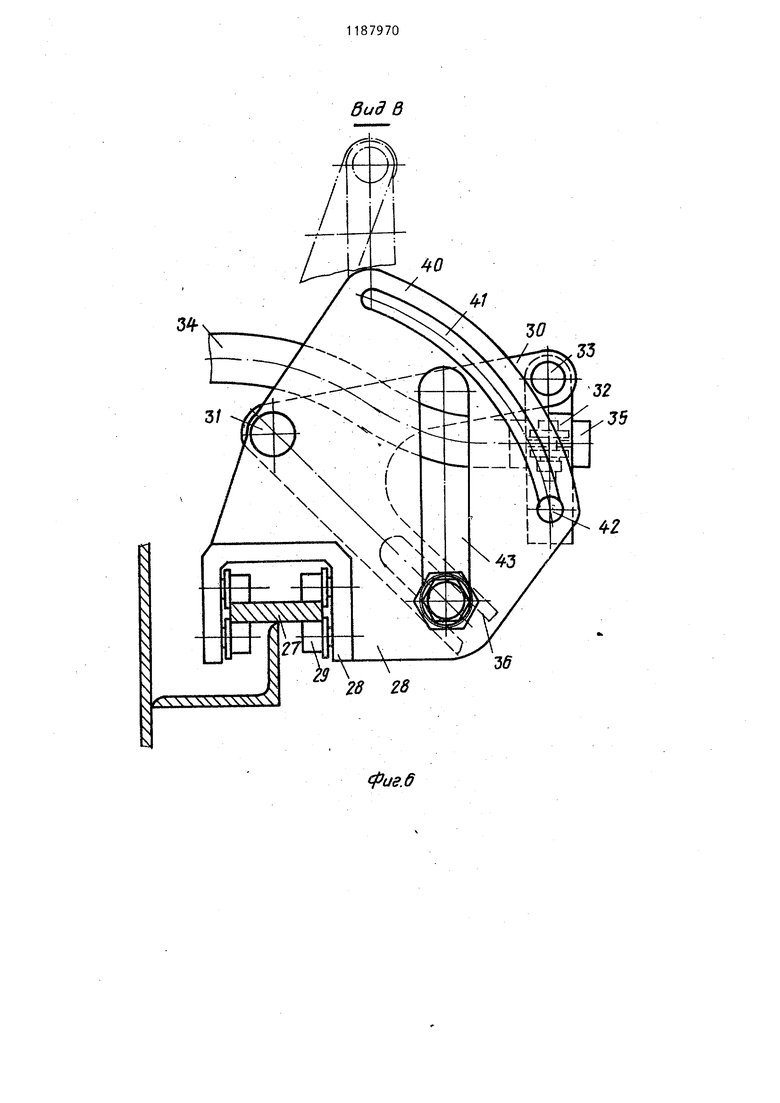
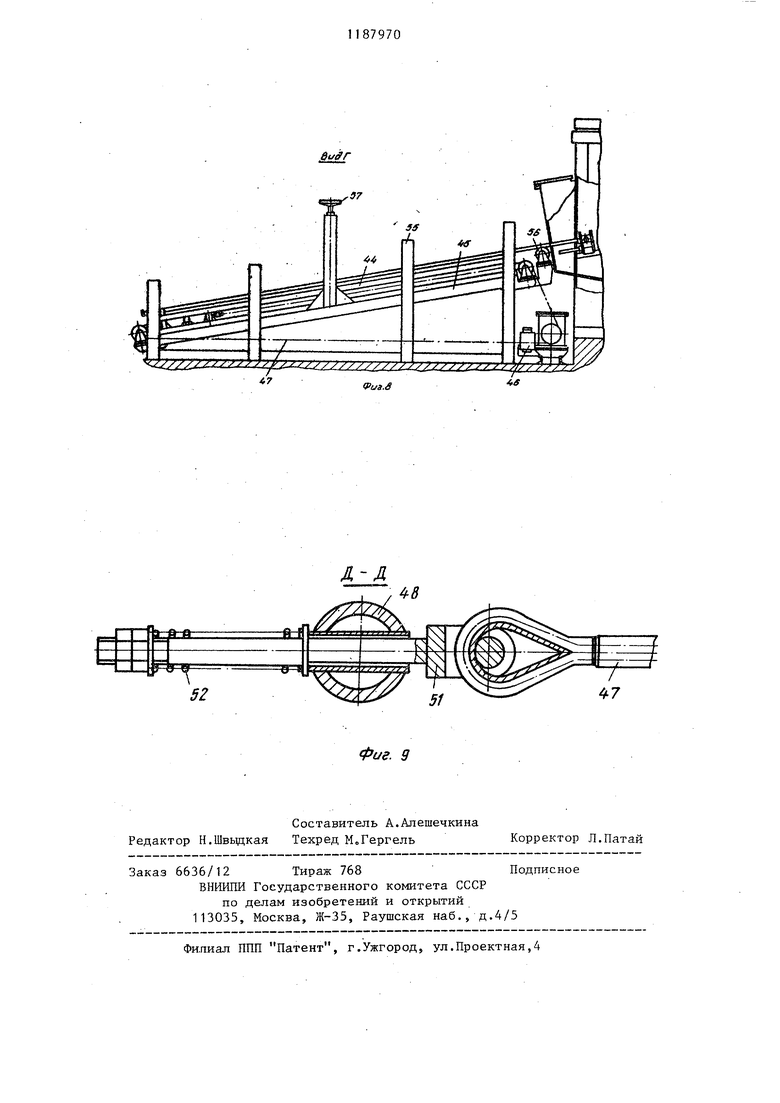
Изобретение относится к дробеструйной . обработке. , Целью изобретения является расширение технологических возможностей путем обработки внутренних и наружных поверхностей детадтей различных размеров. На фиг. 1 схематически изображена установка, общий вид; на фиг. 2 механизм перемещения и поворота упорных роликов; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг.. 5 - каретка, общий вид, изображение перевернуто; на фиг. 6 - вид В на фиг. 5; на фиг. 7 устройство передвижения тележки, вид сверху; на фиг. 8 - вид Г на фиг. 7; на фиг. 9 - разрез Д-Д на фиг. 7. Установка состоит из камеры 1, устройства 2 перемещения каретки, дробеструйных аппаратов 3 и системы 4 отсоса дроби из камеры и сепарации дроби от пыпи. Камера 1 состоит из корпуса 5, крьшки 6, пневмоцилиндров 7 подъема и опускания крышки, роликов 8 поддержания и вращения баллона 9, привода 10 вращения роликов, упорных роликов 11, механизма 12 перемещения и поворота упорных роликов 11, каретки 13. Механизм 12 перемещения и поворота упорных роликов 11 включает в себя два Г-образных кронштейна 14, установленных с возможностью перемещения По высоте и поворота относительно направляющих 15. В вильчатом конце 16 каждого кронштейна 14 закреплен упорный ролик 11, другой конец соединен с пальцем 17 ползуна 18 Ползуны 18 смонтированы на направляю щих 19 кронштейнов 20 с возможностью перемещения посредством горизонтального винта 21. Кронштейны 20 одним концом соединены с направляющими 22 а другим - с корпусом-23, смонтированным в направляющих 24 плиты 25 с возможностью перемещения посредством винта 26. Каретка 13 смонтирована на направ ляющей 27 с возможностью перемещения вдоль наружной поверхности баллона 9 и состоит из корпуса 28, к которому закреплены ролики 29, схватьшаюпре направляющую 27, двуплечего рычага 30, соединенного подвижно с корпусо 28 посредством оси 31 хомута 32, подвешенного к верхнему концу двуплечего рычага 30 посредством оси 33. Хомут предназначен для крепления гибкого шланга 34, по которому пода-, ется дробь от дробеструйного аппарата 3 на очистку наружной поверхности баллона 9, на конце которого закреплено сопло 35. Нижний конец двуплечего рычага имеет продольные пазы 36, в которые вставлен стержень 37, соединенньй со штангой 38 каретки 39. В щеках 40 корпуса 28 вьшолнены криволинейные пазы 41 с переменным радиусом от центра разворота двуплечего рычага, по которым перемещаются пальцы 42, соединенные с нижней частью хомута 32. В передней щеке 40, к которой подходит штанга 38, вьшолнен вертикальный паз 43 для обеспечения возможности перемещения стержня 37 по вертикали. Устройство 2 перемещения каретки состоит из каретки 39, подвижной 44 и неподвижной 45 рам привода 46 перемещения тележки и трособлочной системы 47. Каретка 39 состоит из рамы 48, на концах которой установлены горизонтальные 49 -и вертикальные 50 ролики для перемещения по направляющим подвижной рамы 44. Каретка 39 соединена с приводом 46 посредством трособлочной системы 47 и вилок 51. Для компенсации изменения длины троса (привод 46 стационарно закреплен к фундаменту) при подъеме (опускании) подвижной рамы 44 совместно с кареткой 39 посредством винтового привода вилки 51 подпружинены пружины 52 с двух концов каретки 39. Этим обеспечивается постоянное натяжение троса между кареткой 39 и приводом 46 для ее перемещения. На верхней части рамы каретки 39 шарнирно закреплены штанга 38, соединенная с кареткой 13, и штанга с соплом 53, по которому дробь подается от дробеструйного аппарата 3 на очистку внутренней поверхности баллонов 9. На подвижной раме 44 закреплены по бокам ролики 54, которые перемещаются в направляющих 55 неподвижной рамы 45, и на переднем торце поддерживающие штангу ролики 56. Перемещение осуществляется приводом 57. 3 Установка работает следующим образом. Каретку отводят в крайнее нижнее положение на подвижной раме 44. Поднимают крышку камеры 1 подачей сжатого воздуха в пневмоцилиндры 7 и грузоподъемным средством с помощью спецзахватов (не показаны) опускают баллон 9 на ролики 8 поддержания и вращения баллонов, не прижимая баллоны к упорам роликов 11. Вращением винта 21 (по или против часовой стрелки), имеющего правую и левую резьбовые нарезки, ползуны 18 перемещают вдоль оси винта по горизонтальным направляющим 19 кронштейна 20, а.пальцы 17 ползунов 18 при этом разворачивают (сводят или разводят) Г-образные кронштейны с закрепленными упорными роликами 11 в вильчатых концах 16 вокруг вертикальных направляющих 15 на заданный размер горловины баллона 9 с учетом вида горловины. Вращением винта 26 корпус 23 с закрепленными на нем кронштейном 20 и винтом 21 перемещают вверх или вниз по направляющим 22 и 24 неподвижной плиты 25, а ползуны 18, поскольку они соединены с винтом 21 и с направляюпщми 19 кронштейнов 20 посредством своих пальцев 17, переме щают вверх или вниз Г-образные рычаги 17, вдоль направлякшщх 15 и устаi навливают таким образом упорные ролики 11 на заданный размер по высоте с учетом наружного диаметра балло на 9. Баллон прижимают к упорным роликам 11. Приводом 57 перемещают по высота раму 44 с установленной на ней карет кой таким образом, чтобы ось штанги с соплом 53 совместилась с осью горловины баллона 9. Одновременно с перемещением карет ки 39, установленной на подвижной раме 44 по высоте (вверх или вниз), штанга 38, соединенная с одним концом с тележкой, а другим - со стержнем 37 каретки 13, вставленным в продольные пазы нижнего конца двуплечего рычага 30 и вертикальный па,з 43 щеки 40 корпуса 28, перемещает стержень 37 по вертикали. Стержень 37 тянет за собой двуплечий рычаг 30 (вверх или вниз) и разворачивает его вокруг оси 31, скользя 04 в продольных пазах нижнего конца двуплечего рычага 30. Так как гибкий шланг 34 с соплом 35 подвешен шарнирно к верхнему концу двуплечего рычага 30 с помощью хомута 32,то при повороте двуплечего рычага сопло 35 автоматически устанавливается на высоту, соответствующую 1/2 наружного диаметра баллона 9, что обеспечивает оптимальное расстояние от сопла 35 до наружной поверхности баллона 9. А перемещение пальцев 42, соединенных с нижней частью хомута 32, по криволинейным пазам 41 корпуса 28 каретки 13 обеспечивает сохранение горизонФального положения оси сопла 35. Компенсация изменения длины троса в трособлочной системе 47 при подъеме (опускании) подвижной рамы 44 совместно с кареткой 39 осуществляется вьщвижением (утапливанием) вилок 51 из рамы 48 каретки 39 и сжатием (растяжением) пружин 52. Поскольку Привод 57 имеет самотормозящуюся резьбу, то в любом положении по высоте подвижная рама 44 ; с кареткой 39 находится в устойчивом состоянии и трос в трособлочной системе 47 всегда находится в натянутом состоянии. Передний конечный выключатель (не показан), ограничивакяций перемещение каретки 39 при очистке и осуществляющий реверс привода 46 перемещения каретки, устанавливают в положение в зависимости от длины обрабатываемой части баллона. Включением привода 46 перемещения тележки проверяют правильность установки конечного выключателя.Опускают крышку 6 камеры 1. Включают привод 10 вращения роликов 8 (и соответственно баллона 9), систему 4 отсоса и сепарации дроби, открывают клапаны подачи воздуха в дробеструйные аппараты 3 и эжектирующим головкам аппаратов, включают привод 46 перемещения тележки со штангами. В процессе очистки баллона изнути и снаружи (возможна и односторонняя очистка баллона) каретка 39 доодит до переднего конечного выклюатепя, останавливается, осуществлятся реверс привода 46, и тележка еремещается в обратную сторону. олный цикл очистки баллона осуществляется при реверсивном ходе тележки.
Отработайная дробь из внутренней
части баллона вькыг ается через горЛовину наклоненного баллона в бункер камеры 1. Вращение баллона способствует лучшему высыпанию дроби из баллона.
С отключением привода 46 перемещения каретки от конечного выключатедя (н6 показан) одновременно прекр щается подача дроби в сопла и
останавливается привод 10 вращения роликов 8 и баллона 9). Открьшают крьшжу 6 камеры 1, грузоподъемным средством посредством спецзахватов поднимают баллон, поворачивают вниз горловиной, высыпают из баллона оставшуюся дробь и продувают внутреннюю полость баллона сжатым воздухом.
После удаления дроби и пыли из камеры 1 систему 4 отсоса и сепарации дроби отключают.


| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм чистки рам и броней коксовых печей | 1960 |
|
SU132610A1 |
| Дробеструйный комплекс | 1989 |
|
SU1646800A1 |
| Установка для нанесения полимерных покрытий на внутреннюю поверхность хлебопекарных форм | 1983 |
|
SU1122288A1 |
| Дробеметное устройство для очистки наружной и внутренней поверхностей труб | 1988 |
|
SU1576298A1 |
| Поточная линия для производства эмалированных труб | 1981 |
|
SU989900A1 |
| УСТАНОВКА ДЛЯ ДРОБЕСТРУЙНОЙ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2022 |
|
RU2794311C1 |
| Установка для металлизации изделий | 1980 |
|
SU931797A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ДРОББЮ | 1971 |
|
SU306952A1 |
| Стенд для ремонта и испытаний гидроцилиндров | 1990 |
|
SU1803612A1 |
| Устройство для струйной обработки изделий | 1985 |
|
SU1284809A1 |


1. УСТАНОВКА ДЛЯ ОЧИСТКИ ЕМКОСТЕЙ С УЗКОЙ ГОРЛОВИНОЙ, содержащая камеру с опорными и упорными роликами, каретку с соплом дпя обработки внутренних поверхностей, расположенную на основании и связанную с трособлочной системой, отличающаяся тем, что, с целью распшрения технологических возможностей путем обработки внутренних и наружных поверхностей деталей различных размеров, она снабжена механизмом перемещения и поворота упорньк роликов, выполненным в виде Г-образных кронштейнов, дополнительной кареткой, установленной в камере и связанной с основной кареткой, при этом основание выполнено в виде неподвижной и подвижной рам. 2.Установка поп.1, отличающаяся тем, что дополнительная каретка снабжена хомутом с пальцем, предназначенным для крепления сопла для обработки наружной поверхности,и двуплечим рычагом, один конец которого связан с хомутом, а другой - с корпусом каретки, при этом корпус каретки выполнен с криволинейным пазом, предназначенным для перемещения пальца. (Л с 3.Установка по п.1, отличающаяся тем, что трособлоцная система связана с кареткой посредством выведенных в установку подвижных подпружиненных вилок.
to
И
21
f
/
-IS
e-s
гз
Of
Vtl
cia г
ю
.
Р5 -:
И
J
«о
Ю
/
сэ h
7 7 jf У.
It)
29
8ид В 28 гв
fpue.6 ЪЪ
Si
| Установка для очистки и металлизации внутренней поверхности цилиндрических резервуаров | 1958 |
|
SU120742A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
