П
717
(Л С
so 00
Изобретение относится к робототехнике и может быть использовано для загрузочных работ, где необходимо сохранение положения оси цилиндрических деталей разного днаметра при зажиме в схвате.
Целью изобретения является повышение надежности базирования детали в схвате.
На чертеже изображен предложенный схват с зажатой деталью минимальных размеров, общий вид.
Схват содержит корпус 1 с шарнирно закрепленным в нем силовым цилиндром 2, имеющим поршень 3 со штоком А, причем последний шарнирно связан с толкателем, выполненным в виде поворотного кулачка 5. В корпусе 1 на осях установлены рычаги 6 и 7, поджатые к кулачку пружиной 8.
Силовой цилиндр имеет установленную на нем пружину 9 рабочего хода и систему 10 подвода рабочей среды.
Схват работает следующим образом
Поршень 3 находится в крайнем пр вом положении, рычаги 6 и 7 разведены, поверхность С кулачка также оведена от центра рабочей зоны схвата. При снижении давления в левой полости силового цилиндра 2 поршень
под действием пружины 9 движется влево, причем кулачок 5, шарнирно связанный со штоком 4, поворачивается против часовой стрелки, а рычаги 6 и 7, опирающиеся на поверхности А и В кулачка 5, под действием пружины 8 сходятся, зажимая деталь II. При этом поверхность С кулачка 5 одновременно движется приближенно по касательной к поверхности детали I1 до взаимодействия с поверхностью детали, что дает возможность поворота детали под действием силы трения от воздействия кулачка на поверхность детали в окружном направлении относительно концов рычагов и способствует самоустановке детали по трем основным точкам базовой поверхности.
Применение предлагаемого схвата повысит надежность базирования при зажиме детали в схвате, так как деталь за счет фрикционного воздействия поверхности С кулачка 5 имеет возможность довернуться в схвате для занятия углового положения, соответствующего наиболее выгодному зажиму за наименьший наружный диаметр (за впадины, имеющие место при значительном отклонении формы наружной цилиндрической поверхности).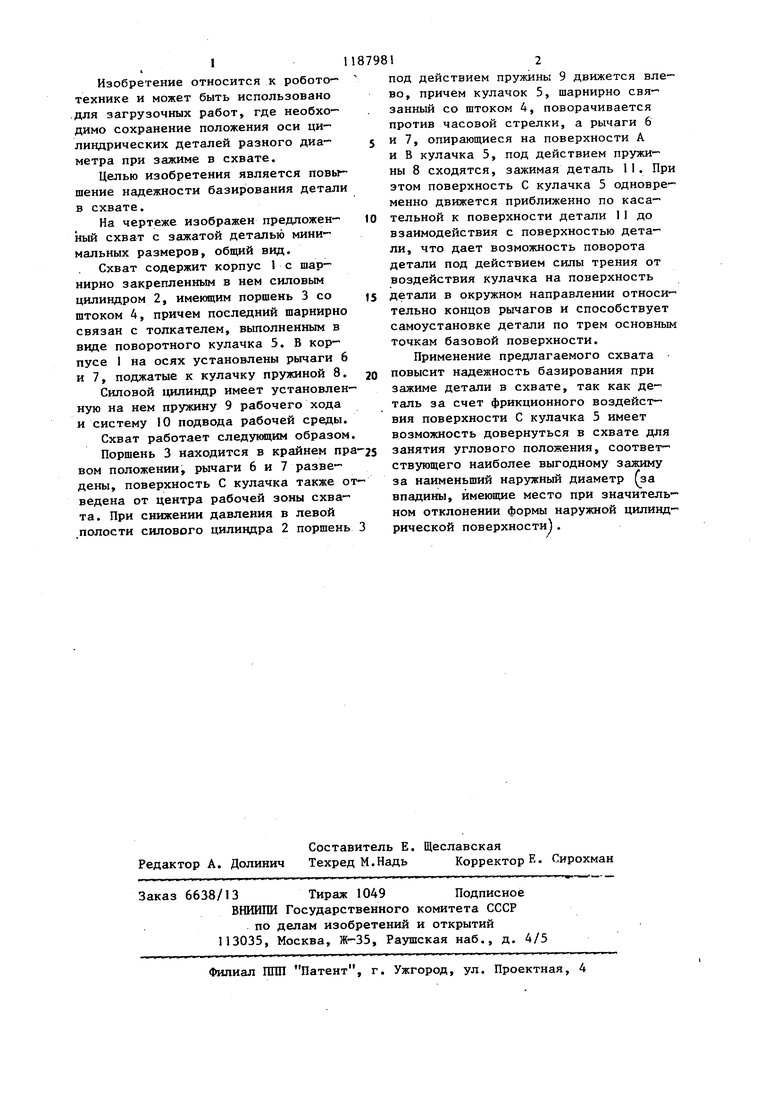
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Устройство для закрепления детали | 1987 |
|
SU1572753A1 |
| Манипулятор | 1979 |
|
SU829412A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Устройство для финишной обработки криволинейных поверхностей | 1984 |
|
SU1187964A2 |
| Схват | 1980 |
|
SU1046085A1 |
СХВАТ, содержащий установленные в корпусе двуплечие рычаги и привод их перемещения, выполненный в виде закрепленного в корпусе кулачка, отличающийся тем, что, с целью повышения надежности базирования, на кулачке выполнена опорная поверхность.
| Горошкин А.К | |||
| Приспособления для металлорежущих станков, М.: Машиностроение , 1971, с | |||
| Прибор для периодического прерывания электрической цепи в случае ее перегрузки | 1921 |
|
SU260A1 |
