Изобретение относится к машиностроению и может быть использовано при создании гибких автоматизированных комплексов.
На фиг.1 изображен гибкий автоматизированный комплекс, вид в план на фиг.2 - разрез А-А на фиг.1. (повернуто); на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.2; на фиг.З - фиксаторы на грузозахвате.
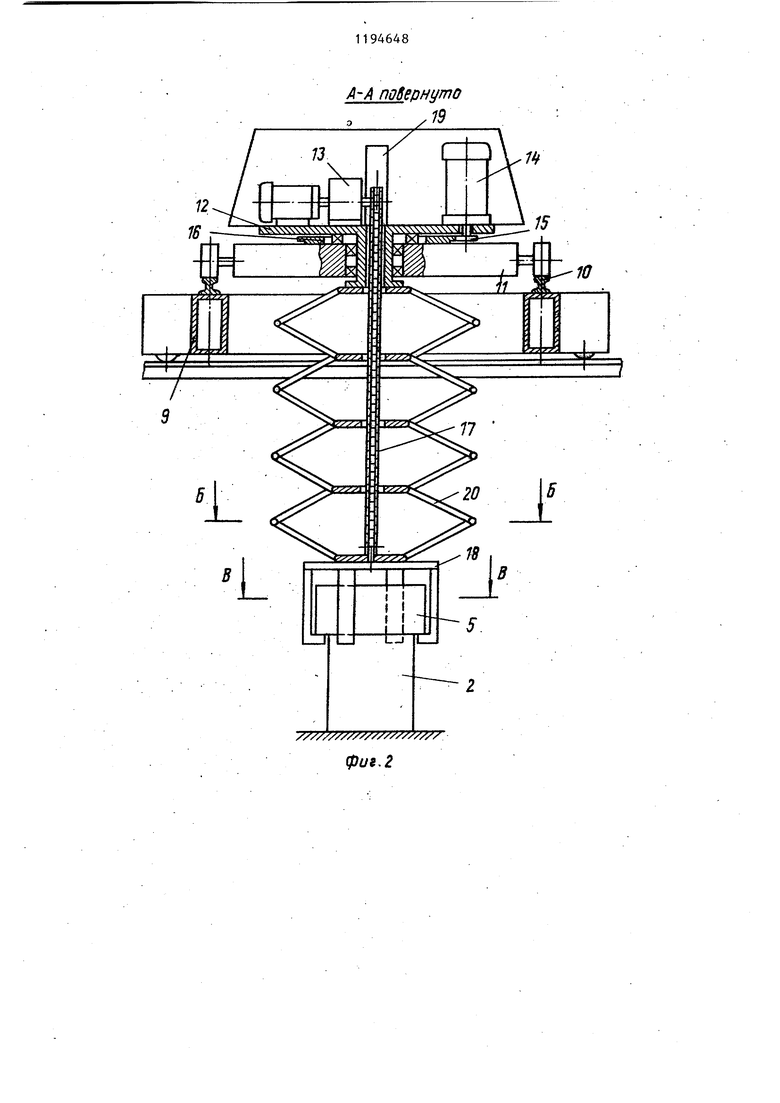
, Гибкий автоматизированный комплекс содержит технологическое оборудование 1, снабженное приемоотправочными столами2 и 3, автоматизированньй склад 4 с комплектом тары 5, мостовой кран-манипулятор 6, систему управления- 7, объединяющую элементы комплекса. Мостовой кран-манипулятор 6 перемещается по подкрановым путям 8, расположенным вдоль пролета цеха. Мост 9 кранаманипулятора оборудован направляющими 1 О для. перемещения тележки 11. На тележке 11 в подшипниках смонтирована платформа 12, на которой расположены грузоподъемный механизм 13 и механизм 14 поворота тары Шестерня 15 механизма 14 поворота тары находится в зацеплении с зубчатым венцом 16, неподвижно закрепленHbw относительно тележки 11. Подъем груза осуществляется при помощи цепи 17, один конец которой закреплен на грузозахвате 18, а свободньй конец цепи 17 складывается в магазине 19 сбора цепи. Для предотвращения раскачивания грузозахвата 18 при подъеме-опускании тары 5 служит ры;чажная подвеска 20, которая крепится одним концом к нижней части поворотной платформы 12, а другим концом - к грузозахвату 18; Для предотвращения выпадания тары грузозахват снабжен фиксаторами 21 с механизмом природа 22.
Работа гибкого автоматизированного комплекса осуществляется следующим образом.
Получив задание от диспетчера направить детали со склада 4 к технологическому оборудованию 1, система управления 7 определяет ячейку склада, в которой расположена тара 5 с требуемыми деталями, и направляет к ней штабелер склада 4. Шта94648,
белер захватывает тару с деталями и доставляет ее на приемо-отправоч ный стол 2 склада 4. Мостовой кранманипулятор 6 получает команду
5 приступить к загрузке. Включаются приводы перемещения мостового крана-манипулятора, и мост 9 разгоняется и перемещается к приемо-отправочному столу 2 склада 4. Одновременно включается привод перемещения тележки, и тележка 11 перемещается по мосту. Над приемо-отправочным столом 2 происходит плавная остановка моста 9 и тележки 11
15 с необходимой точностью. Затем
включается привод поворота и производится поворот грузозахвата 18 по часовой стрелке на угол отно- сительно угла расположения стола 2,
20 хранящегося в памяти системы управления комплексом.
Далее включается привод грузоподъемного механизма 13, грузозах- . ват 18 опускается до тех пор, пока
25 координата, отсчитываемая датчиком положения грузозахвата 18, не совпадет с координатой высоты приемоотправочногр стола, хранящейся в . памяти системы управления комплек30 сем. После этого снова включается привод поворота, и грузозахват 18 поворачивается на 20 против часовой стрелки. При этом лапы грузозахвата 18 заходят под днище тары 5,
« установленной на приемо-отправочном столе 2. Затем включается привод грузоподъемного механизма, и грузозахват с тарой поднимаются.
Далее, в соответствии с программой, робот получает координаты приемо-отправочного стола, на который требуется доставить тару в соответствии с технологическим маршрутом данной детали.
Цри прибытии на заданную позицию мостовой кран-манипулятор выполняет операцию разгрузки. При этом грузозахват 18 с тарой 5 опускается до
jg поверхности приемо-отправочного стола 2, производится поворот грузозахвата на угол 20 по часовой стрелкеt затем высвободившийся от тары грузозахват поднимается и
JJ поворачивается в исходное положение, тара 5 остается на столе 2.
XX/ / /X- X /XX/VX XX
А-А noSepHijmo 75
фиг, 2
1194648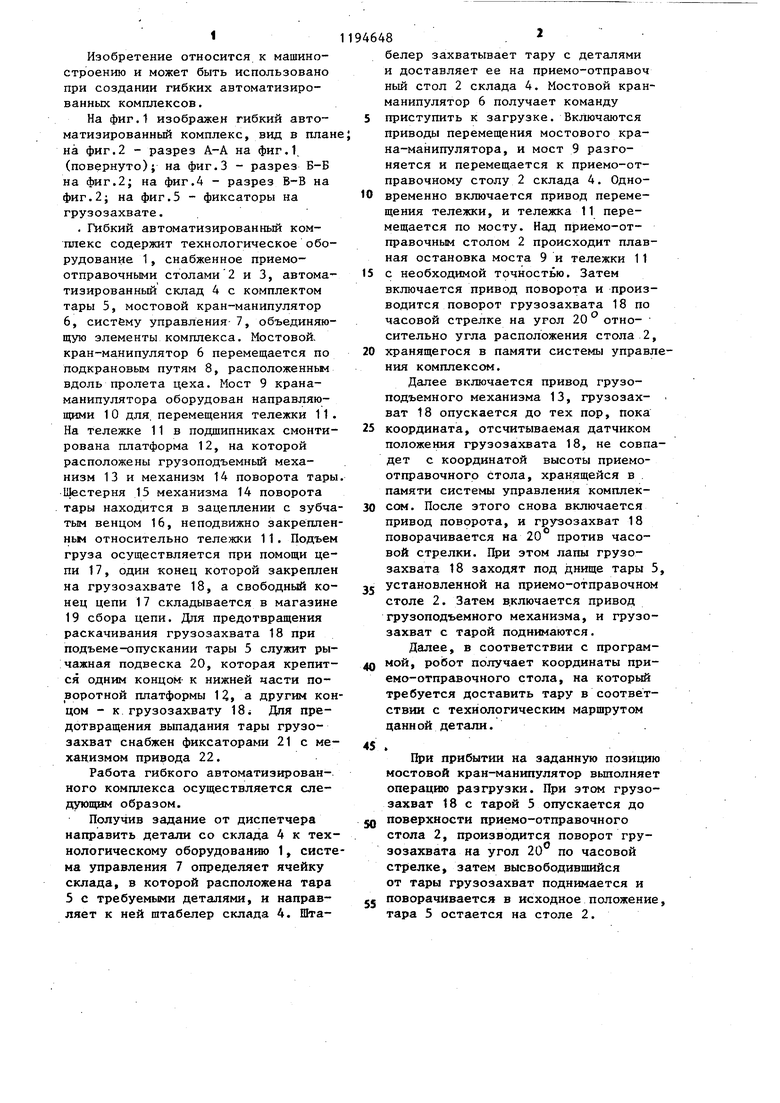
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный комплекс | 1985 |
|
SU1349970A1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Гибкая автоматизированная система | 1987 |
|
SU1562107A1 |
| Грузоподъемная площадка крана- штабелера | 1978 |
|
SU740660A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| Автоматизированный технологический комплекс | 1987 |
|
SU1509225A1 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Автоматизированная транспортно-накопительная система | 1988 |
|
SU1648732A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
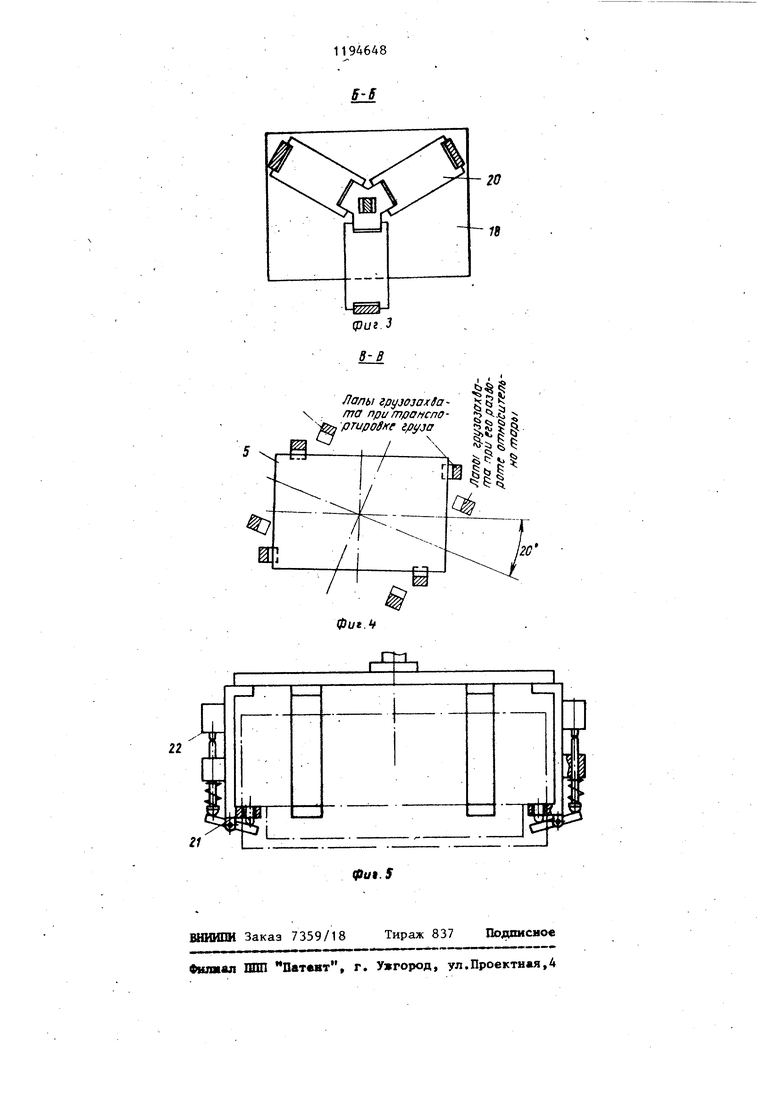
МОСТОВОЙ КРАН-МАНШУЛЯТОР, содержащий портал с установленной на нем тележкой, снабженной захватом с механизмом его перемещения, поворота и опускания, о т л и ч а ющ и и с я тем, что с целью повышения надежнйсти, захват через дополнительно введенную рычажную подвеску закреплен на механизме поворота . 2 X 2,Н 2 7 (Л 8 ;о ( о: 4 00 Фиг. 7
, ртировхе груза
Лапы грузозах ата npumpof cno
| Рапопорт Г.Н | |||
| и др. | |||
| Автоматизированные системы управления технологическими процессами | |||
| М.: Машиностроение, 1977, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
