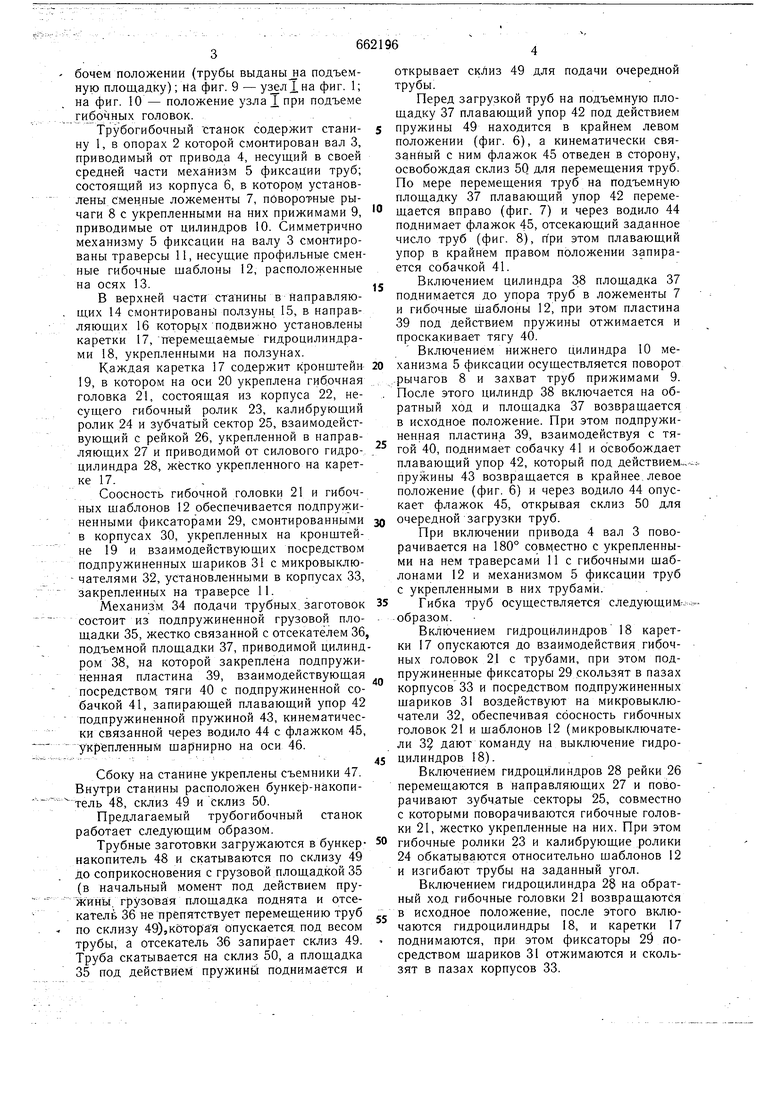
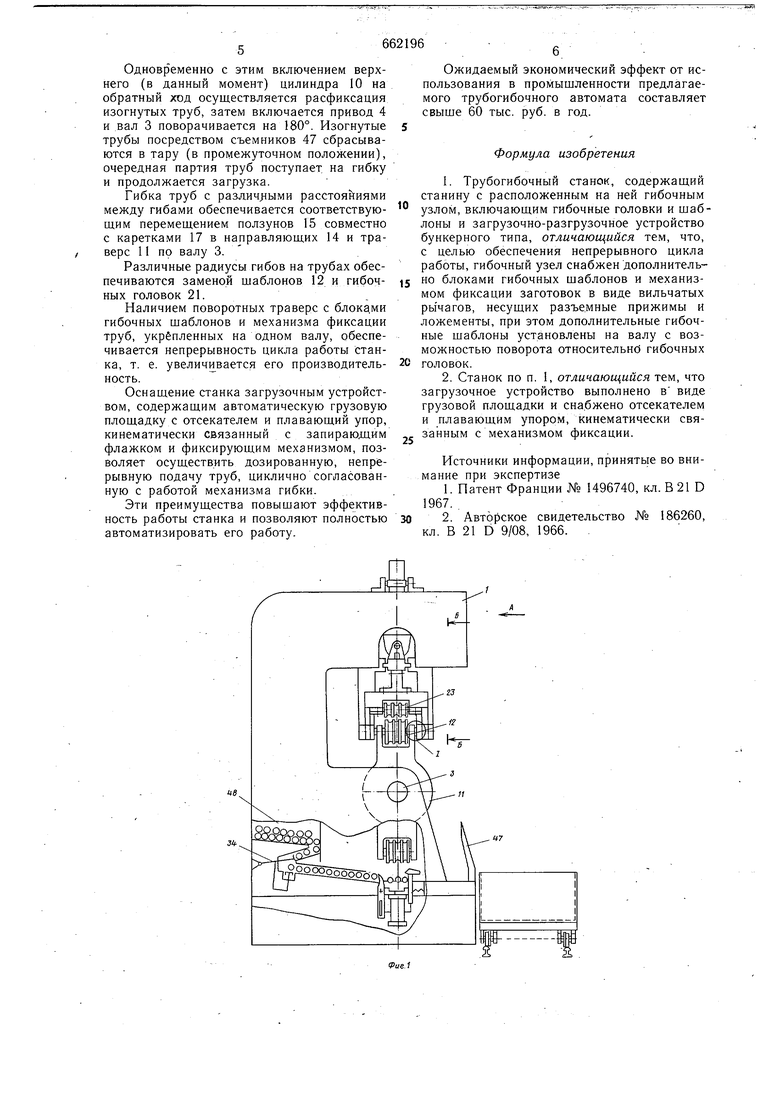
(54) ТРУБОГИБОЧНЫЙ СТАНОК бочем положении (трубы выданыjia подъемную площадку); На фиг. 9 - узел Хна фиг. 1; на фиг. 10 - положение узла J. при подъеме гибочных головок. Трубогибочный 1:танок содержит станину 1, в опорах 2 которой смонтирован вал 3, приводимый от привода 4, несущий в своей средней части механизм 5 фиксации труб; состоящий из корпуса 6, в котором установлены сменные ложементы 7, поворотные рычаги 8 с укрепленными на них прижимами 9, приводимые от цилиндров 10. Симметрично механизму 5 фиксации на валу 3 смонтированы траверсы 11, несущие профильные сменные гибочные щаблоны 12, расположенные на осях 13. В верхней части сган1гны в направляющих 14 смонтированы ползуны 15, в направляющих 16 которых подвижно установлены каретки 17, тгеремещаемые гидроцилиндрами 18, укрепленными на ползунах. Каждая каретка 17 содержит кронштейн 19, в котором на оси 20 укреплена гибочная головка 21, состоящая из корпуса 22, несущего гибочный ролик 23, калибрующий ролик 24 и зубчатый сектор 25, взаимодействующий с рейкой 26, укрепленной в направляющих 27 и приводимой от силового гидроцилиндра 28, жёстко укрепленного на каретке 17. Соосность гибочной головки 21 и гибочных щаблонов 12 обеспечивается подпружиненными фиксаторами 29, смонтированными в корпусах 30, укрепленных на кронштейне 19 и взаимодействующих посредством подпружиненных щариков 31 с микровыклю- чателями 32, установленными в корпусах 33, закрепленных на траверсе 11. Механизм 34 подачи трубных, заготовок состоит из подпружиненной грузовой площадки 35, жестко связанной с отсекателем 36, подъемной площадки 37, приводимой цилинд ром 38, на которой закреплена подпружиненная пластина 39, взаимодействующая посредством, тяги 40 с подпружиненной собачкой 41, запирающей плавающий упор 42 подпружиненной пружиной 43, кинематически связанной через водило 44 с флажком 45, укрепленным щарнирно на оси 46. Сбоку на станине укреплены съемники 47. Внутри станины расположен бункер-накопитель 48, склиз 49 и склиз 50. Предлагаемый трубогибочный станок работает следующим образом. Трубные заготовки загружаются в бункернакопитель 48 и скатываются по склизу 49 до соприкосновения с грузовой площадкой 35 (в начальный момент под действием пружины грузова;Я площадка поднята и отсекателв 36 не препятствует перемещению труб по склизу 49),кОторая опускается под весом трубы, а отсекатель 36 запирает склиз 49. Труба скатывается на склиз 50, а площадка 35 под действием пружинй поднимается и открывает склиз 49 для подачи очередной трубы. Перед загрузкой труб на подъемную площадку 37 плавающий упор 42 под действием пружины 49 находится в крайнем левом положении (фиг. 6), а кинематически связанный с ним флажок 45 отведен в сторону, освобождая склиз 50 для перемещения труб. По мере перемещения труб на подъемную площадку 37 плавающий упор 42 перемещается вправо (фиг. 7) и через водило 44 поднимает флажок 45, отсекающий заданное число труб (фиг. 8), при этом плавающий упор в крайнем правом положении запирается собачкой 41. Включением цилиндра 38 площадка 37 поднимается до упора труб в ложементы 7 и гибочные щаблоны 12, при этом пластина 39 под действием пружины отжимается и проскакивает тягу 40. Включением нижнего цилиндра 10 механизма 5 фиксации осуществляется поворот -рычагов 8 и захват труб прижимами 9. После этого цилиндр 38 включается на обратный ход и площадка 37 возвращается в исходное положение. При этом подпружиненная пластина 39, взаимодействуя с тягой 40, поднимает собачку 41 и освобождает плавающий упор 42, который под действиемпружины 43 возвращается в крайнее, левое положение (фиг. б) и через водило 44 опускает флажок 45, открывая склиз 50 для очередной загрузки труб. При включении привода 4 вал 3 поворачивается на 180° coBiwecTHO с укрепленными на нем траверсами 11 с гибочными шаблонами 12 и механизмом 5 фиксации труб с укрепленными в них трубами. Гибка труб осуществляется следующимобразом. Вк.лючением гидроцилиндров 18 каретки 17 опускаются до взаимодействия гибочных головок 21 с трубами, при этом подпружиненные фиксаторы 29 скользят в пазах корпусов 33 и посредством подпружиненных шариков 31 воздействуют на микровыключатели 32, обеспечивая соосность гибочных головок 21 и щаблонов 12 (микровыключатели 3 дают команду на выключение гидроцилиндров 18). Включением гидроцилиндров 28 рейки 26 перемещаются в направляющих 27 и поворачивают зубчатые секторы 25, совместно с которыми поворачиваются гибочные головки 21, жестко укрепленные на них. При этом гибочные ролики 23 и калибрующие ролики 24 обкатываются относительно шаблонов 12 и изгибают трубы на заданный угол. Включением гидроцилиндра 28 на обратный ход гибочные головки 21 возвращаются в исходное положение, после этого включаются гидроцилиндры 18, и каретки 17 поднимаются, при этом фиксаторы 29 посредством шариков 31 отжимаются и скользят в пазах корпусов 33.
Одновременно с этим включением верхнего (в данный момент) цилиндра 10 на обратный ход осуществляется расфиксация изогнутых труб, затем включается привод 4 и вал 3 поворачивается на 180°. Изогнутые трубы посредством съемников 47 сбрасываются в тару (в промежуточном положении), очередная партия труб поступает на гибку и продолжается загрузка.
Гибка труб с paзлич ыми расстояниями между гибами обеспечивается соответствующим перемещением ползунов 15 совместно с каретками 17 в направляющих 14 и траверс 11 по валу 3.
Различные радиусы гибов на трубах обеспечиваются заменой щаблонов 12 и гибочных головок 21.
Наличием поворотных траверс с блока.ми гибочных щаблонов и механизма фиксации труб, укрепленных на одном валу, обеспечивается непрерывность цикла работы станка, т. е. увеличивается его производительность.
Оснащение станка загрузочным устройством, содержащим автоматическую грузовую площадку с отсекателем и плавающий упор, кинематически связанный с запирающим флажком и фиксирующим механизмом, позволяет осуществить дозированную, непрерывную подачу труб, циклично согласованную с работой механизма гибки.
Эти преимущества повыщают эффективность работы станка и позволяют полностью автоматизировать его работу.
4г
Ожидаемый экономический эффект от использования в промыщленности предлагаемого трубогибочного автомата составляет свыще 60 тыс. руб. в год.
Формула изобретения
1.Трубогибочный станок, содержащий станину с расположенным на ней гибочным
узлом, включающим гибочные головки и щаблоны и загрузочно-разгрузочное устройство бункерного типа, отличающийся тем, что, с целью обеспечения непрерывного цикла работы, гибочный узел снабжен дополнительно блоками гибочных щаблонов и механизмом фиксации заготовок в виде вильчатых рычагов, несущих разъемные прижимы и ложементы, при этом дополнительные гибочные щаблоны установлены на валу с возможностью поворота относительно гибочных
головок.
2.Станок по п. 1, отличающийся тем, что загрузочное устройство выполнено в виде грузовой площадки и снабжено отсекателем и плавающим упором, кинематически связанным с механизмом фиксации.
Источники информации, принятые во внимание при экспертизе
1. Патент Франции № 1496740, кл. В 21 D 1967..
2. Авторское свидетельство № 186260, кл. В 21 D 9/08, 1966. .
Г
.11
/
1
-h
tH
:bk
-/-
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1984 |
|
SU1378982A1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| Трубогибочный станок | 1975 |
|
SU659235A1 |
| Станок для двухсторонней гибки труб | 1973 |
|
SU501802A1 |
| Станок для подгибки труб в панелях | 1978 |
|
SU729907A2 |
| Станок для гибки с растяжением профилей | 1990 |
|
SU1779433A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ГИБКИ ТРУБ | 1970 |
|
SU259616A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |

rt
гз
го
19
8-В
Фаг. if
25I
r-r
.3
Фае.5
