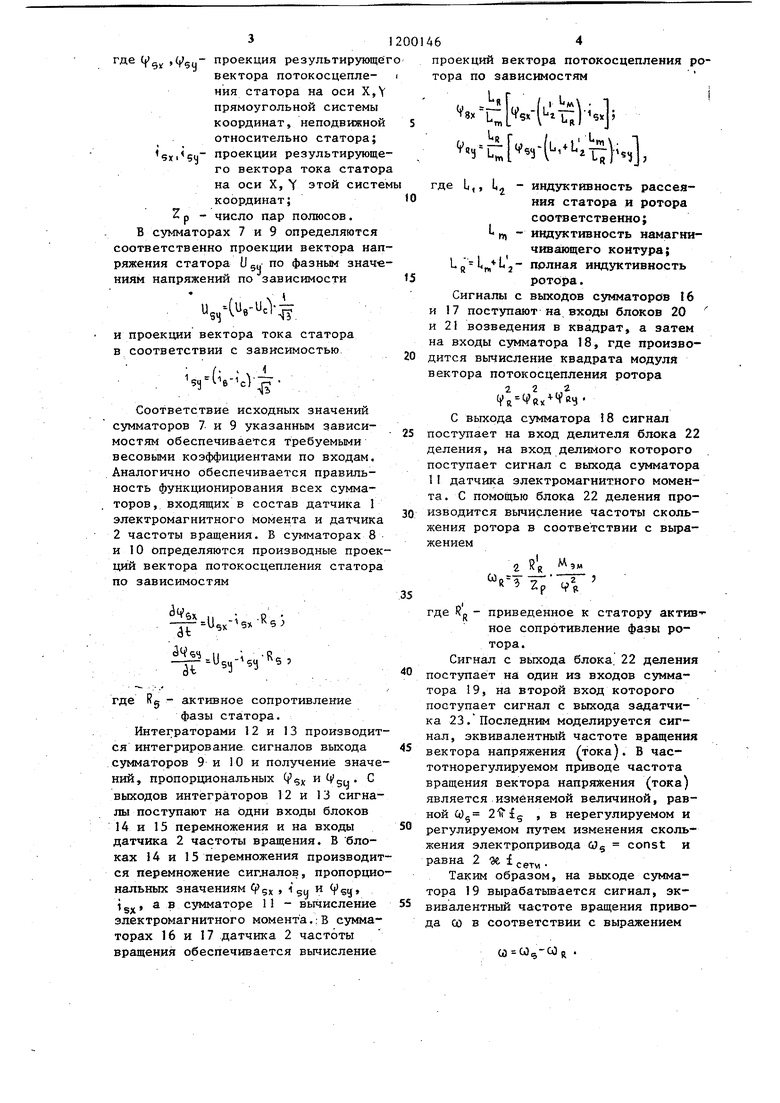
Изобретение относится к силоиэмерительной технике и может быть использовано для определения нагрузочного момента электродвигателя. Целью изобретения является повьш ние точности. На чертеже представлена структур ная схема устройства для определения нагрузочного момента электродвигателя.. Устройство содержит датчик I электромагнитного момента, датчик 2 частоты вращения, первый сумматор 3 апериодическое звено 4 и второй сумматор 5. . Датчик 1 электромагнитного момен та -подключен к суммирующему входу п вого сумматора 3, датчик 2 частоты вращения - к второму суммирующему входу первого сумматора 3 и к вычитающему входу сумматора 5, выход ко торого подключен к одному собственному суммирующему входу и к вычитаю щему входу первого сумматора 3, выход которого через апериодическое звено 4 подкл10чен к второму суммирующему входу второго сумматора 5. Кроме того, для определения уско рения вращения ротора в устройство может быть введен третий сумматор 6 суммирующий вход которого прдклю.чей к датчику 1 электромагнитного момента, а вычитающий - к выходувторого сумматора 5. Для определения нагрузочного, момента асинхронного электродвигателя датчик 1 электромагнитного момента и датчик 2 частоты вращения ротора могут быть вьшолнены следующим образом. Датчик 1 электромагнитного момента содержит пять сумматоров 7 11, два интегратора .12 и 13 и два блока 14 и 15 перемножения. Два входа сумматора 7 и один вход сумма тора 8 приспособлены для подключения к ним фазных напряжений питания электродвигателя. Второй вход сумма тора 8 и два входа сумматора 9 приспособлены для подключения к ним си налов, пропорциональных фазным тока питания электродвигателя. Выход сум матора 7 подключен к одному входу сумматора 10, второй вход которого подключен к вьгходу сумматора 9 и к первому входу блока 14 перемножения Выход сумматора 8 через интегратор 1 подк;тючен к второму входу блока 14 перемножения, выход которого подключен к одному входу сумматора 11, второй вход которого подключен к выходу блока 15 перемножения. Выход сумматора 10 через интегратор . 13 подключен к первому входу блока 15 перемножения, второй вход которого подключен к второму входу сумматора 8. Датчик 2 частоты вращения содержит четьфе сумматора 16-19, два блока 20 и 21 возведения в квадрат, блок 22 деления и задатчик 23. При этом входы сумматоров 16 и 17 подключены к элементам датчика 1 электромагнитного момента. В частности, один вход сумматора 16 подключен к второму входу сумматора 8, а второй - к выходу интегратора 12. Один вход сумматора 17 подключен к выходу сумматора 11. Выходы сумматоров 16 и 17 через соответствующие блоки 20 и 21 возведения в квадрат подключены к соответствующим входам сумматора 18, выход которого подключен к одному входу блока 22 деления, выход которого подключен к одному входу сумматора 19, к второму входу которого подключен задатчик 23. Причем к второму входу блока 22 деления подк.1дачен выход сумматора 11 датчика 1 электромагнитного момента. Устройство для определения нагрузочного момента электродвигателя работает следуюп1им образом. .. Измеренные значения токов и напрйжений в фазах статора контролируемого электродвигателя поступают на входы датчика 1 электромагнитного момента и соответственно на входы сумматоров 7 - 9. В общем случае сигналы, цропорциональные значениям токов и напряжений в фазах, могут подаваться на входы датчика частоты вращения, однако в приведенном примере благодаря использованию части составляющих датчика 1 электромагнитного момента для предварительных операций по определению частоты вращения, на входы датчика 2 частоты вращения поступают сигналы тока и напряжения только одной фазы. В датчике 1 определяется электромагнитный момент М.-дПО зависимости ,где (j «Vgu проекция результирующе вектора потокосцепления статора на оси Х, прямоугольной системы координат, неподвижной относительно статора; проекции результирующе го вектора тока статор на оси X,Y этой систе координат; 2 р - число п.ар полюсов. В сумматорах 7 и 9 определяются соответственно проекции вектора нап ряжения статора U gu по фазным знач« ниям напряжении по зависимости . и проекции вектора тока статора в соответствии с зависимостью Чч( Соответствие исходных значений сумматоров 7 и 9 указанным зависимостям обеспечивается требуемыми весовыми коэффициентами по входам. Аналогично обеспечивается правильность функционирования всех сумматоров , входящих в состав датчика Г электромагнитного момента и датчика 2 частоты вращения. В сумматорах 8 и 10 определяются производные проек ций вектора потокосцепления статора по зависимостям и.,-Ц. --Usy- -j S где Rg - активное сопротивление фазы статора. Интеграторами 12 и 13 производит ся интегрирование сигналов выхода сумматоров 9 и 10 и получение значе ний, пропорциональных Vex S4 выходов интеграторов 12 и 13 сигналы поступают на одни входы блоков 14 и 15 перемножения и на входы датчика 2 частоты вращения. В блоках 14 и 15 перемножения производит ся перемножение сиглалов, пропорцио нальных значениям 54 s( а в сумматоре 1 - вычисление электромагнитного момента,:В сумматорах 16 и 17 датчика 2 частоты вращения обеспечивается вычисление 464 проекций вектора потокосцепления ротора по зависимостям ..(L..)ч.i (b.. 1,,, Lj - индуктивность рассеяния статора и ротора соответственно; L - индуктивность намагничивающего коитура; полная индз тивность ротора. Сигналы с выходов сумматоров 16 и 17 поступают на входы блоков 20 и 21 возведения в квадрат, а затем на входы сумматора 18, где производится вычисление квадрата модуля вектора потокосцепления ротора 22,2 й С выхода сумматора 8 сигнал поступает на вход делителя блока 22 деления, на вход делимого которого поступает сигнал с выхода сумматора 11 датчика электромагнитного момента. С помощью блока 22 деления производится вычисление частоты скольжения ротора в соответствии с выражением2 Йй 9м f)2 р fp где R(j - приведенное к статору активное сопротивление фазы ротора. Сигнал с выхода блока. 22 деления поступает на один из входов сумматора 19, на второй вход которого поступает сигнал с выхода задатчика 23.Последним моделируется сигнал, эквивалентный частоте вращения вектора напряжения тока). В частотнорегулируемом приводе частота вращения вектора напряжения (тока) является изменяемой величиной, равной :0д 21 , в нерегулируемом и регулируемом путем изменения скольжения электропривода (J const и равна 2 % f сети Таким образом, на выходе сумматора 19 вырабатьшается сигнал, эквивалентный частоте вращения привода со в соответствии с выражением . 5 Сигнал с выхода сумматора 11 да чика 1 электромагнитного момента поступает на суммирующий вход перв го сумматора 3, на второй суммирую щий вход которого и на вычитающий вход второго сумматора 5 посту пает сигнал с выхода сумматора 19 .датчика 2 частоты вращения. Поскольку апериодическое звено 4 имеет передаточную функцию ви 1 -t-D/Z где 3 - суммарный момент инерции электромеханической систем привода; 2р- число пар полюсов, то на выходе сумматора 5 устанавливается сигнал, пропорциональньй нагрузочному моменту (ы-1-м,м-АЛ с) M,--U)p MC MC-CO-V lOJZp. Р 66 Сумматор 6 обеспечивает вычисление ускорения привода в соответствии с выражением Зсо р f ,«-M,). Формула изобретения Устройство для определения нагрузочного момента электродвигателя, содержащее трехвходовый сумматор, подключенный через апериодическое звено к одному входу второго сумматора, датчик электромагнитного момента, подключенный к первому входу трехвходового сумматора, и датчик частоты вращения, подключенный к вторым входам трехвходового и второго сумматоров, отличающеес я тем, что, с целью повышения его точности, второй сумматор снабжен третьим входом, которьш вместе с третьим входом трехвходового сумматора подключен к выходу второго сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1982 |
|
SU1053254A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретеиие относится к силоизмерительной технике, может быть использовано для определения нагрузочного момента злектродвигателя и позволяет повысить точность. Для этого устройство содержит датчик 1 электромагнитного момента, датчик 2 частоты вращения, первьй сумматор 3, апериодическое звено 4 и второй сумматор 5. Сигнал сумматора 11 поступает на суммирующий вход первого сумматора 3, на второй суммирующий вход которого и на вычитающий вход второго сумматора 5 поступает сигнал с выхода сумматора 19 датчика 2 частоты вращения. 1 ил. (Л
| Устройство для измерения нагрузочного момента электропривода | 1978 |
|
SU697846A1 |
| Ножницы сортовые для резки профилей | 1980 |
|
SU878446A1 |
