изобретение относится к области машиностроения, в частности к механизмам промьшшенных роботов.
Цель изобретения - расширение технологических возможностей адаптивного схвата путем увеличения объма внешней информации.
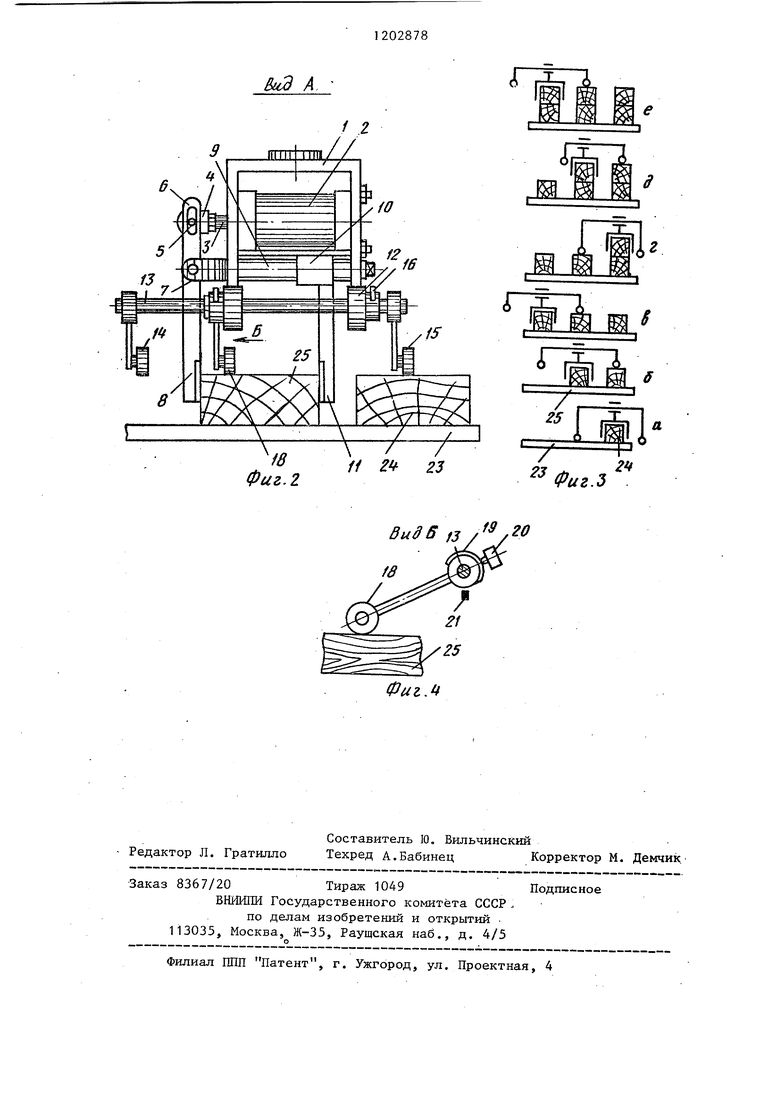
На фиг, 1 представлен адаптивный схват, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - укладки и разборки штабеля адаптрирным схва- том ( d , S , Ь , ,5 , е .- фазы процесса); на фиг. 4 - вид -Б на фиг.2.
Адаптивный схват промышленного робота состоит из корпуса 1, на котором установлен привод 2. Ыа штоке 3 привода 2 закреплена серьга 4 с п;альцем 5, связанным с рычагом 6, шарНИРно установленным на опоре 7, Рычаг 6 оканчивается губкой 8. На корпусе установлен винт 9 с гайкой 10, на которой закреплена вторая губка 11 с возможностью регулировки расстояния между губками 8 и 11. На корпусе 1 установлено средство .12 внешней информации, Ъьшолненное в виде общей оси 13, расположенной перпендикулярно губкам 8 и 11 и снаженной двумя крайними рычагами 14 и 15, ох;ватывающими губки. На оси 13 закреплен кулачок 16, взаимодействующий с конечным выключателем 17. Кроме того, на оси 13 между губками 8 и 11 свободно установлен основной рычаг 18 с возможностью вращения относительно оси 13. Рычаг 18 связан с кулачком 19, взаимодействующи с конечным вьжлючателем 20. Рычаги 14, 15 и 18 фиксируются в исходном положении упорами 21, установленным на кронштейнах 22 корпуса 1, на которых расположен датчик 12 внешней информации,
Адаптивный схват крепится на руке промьюшенного робота (не показан) .
Адаптивньй схват промыишенного робота работает следующим образом.
Рассмотрим укладку и разборку штбеля из брусков по схеме (фиг. 3). Для захвата бруска со стола станка схват опускается к столу, как тольк
028782
рычаг 18 коснется бруска, срабатыва- ет от кулачка 19 выключатель 20 и дает команду на снижение скорости и остановку привода перемещения схвата-.
5 После этого включается привод 2, ко- торьй перемещает шток 3 и через палец 5 поворачивает рычаг 6, прижимая 6pyQOK губкой 8 к губке 11. По окончании захвата бруска робот под10 нимает его и перемещает к платформе 23. Рука останавливается на позицки размещения первого бруска 24 и последний опускается рукой на платфор- . му 23. При касании рычагом 14 поверх15 ности платформы 23 срабатьшает от кулачка 16 выключатель 17 и дает команду на снижение скорости и остат новку привода перемещения схвата.По- еле этого привод 2 отводит губку 8
20 от бруска 24 и дается команда на
подъем схвата и вывод его на позицию захвата следующего бруска 25, кото- рьи аналогичным образом захватывается и подается к платформе 23. При
25 опускании бруска 25 рычаг 15 касается первого бруска 24 и от кулачка 16 срабатывает микровыключатель 17, которьй дает команду на снижение скорости и остановку привода перемещо30 ния схвата. Далее схзат раскрывается и возвращается в исходное положение. После этого цикл укладки брусков повторяется . При укладке бруска 24 во второй ряд рычаг 14 касается нижнего
c второго бруска 25 и т.д. до укладки полного штабеля. Рычаги 14, 15 и 18 , фиксируются в исходном положении упорами 21 .
0 - При работе схвата в режиме разгрузки брусков из штабеля процесс захвата р перемещения брусков происходит аналогично описанному. Во время укладки брусков на стол станка информацию о
е поверхности стола дает один из рыча- гов 14 или 15. Если бруски отсутствуют на платформе 23, рычаг 18 не срабатывает и робот останавливается. Аналогично останавливается робот
Q при работе в режиме загрузки брусков в штабель, если бруски отсутствуют на столе станка.
ВиЭ А.
6
Ч
18 Фиг. 2
/ / // Zf 23
д
25
Lfi
/ 23
Фиг.З
2
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Гибкий производственный модуль | 1989 |
|
SU1754421A2 |
| Промышленный робот | 1987 |
|
SU1414629A1 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |

Составитель Ю. Вильчинский Редактор Л. Гратилло Текред А.Бабинец Корректор М. Демчик.
Заказ 8367/20Тираж 1049Подписное
ВНИШШ Государственного коьштёта СССР .
по делам изобретений и открытий . 113035, Москва, Ж-35, Раущская наб,, д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Фиг.
| Захватное устройство манипулятора | 1979 |
|
SU844268A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
