(54) СТ.АНОК ДЛЯ ГИБКИ ЗМЕЕВИКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
1
Изобретение относится к машиностроению, а именно к оборудованию для обработки давлением трубчатых заготовок.
Известен станок для гибки змеевиков, содержащий станину с двумя взаимно перпендикулярными направляюш,ими, в которых с возможностью возвратно-поступательного перемещения установлены соответственно каретка и суппорт, на последних смонтированы гибочные головки в виде связанных между собой двумя зубчато-реечными передачами полушаблонов, а также установленную с возможностью возвратно-поступательного перемещения в направляющих, параллельных направляющим суппорта, и связанную с ним-плиту 1.
Недостатком известного устройства является малая производительность за счет того, что змеевик перемещается как в процессе гибки, так и во время холостого хода, что снижает скорость холостого хода станка.
Целью изобретения является повышение производительности за счет уменьшения времени холостого хода.
. Для достижения поставленной цели станок для гибки змеевиков, содержащий станину с двумя взаимно перпендикулярными направляющими, в которы.х с возможностью врзвратно-поступательного перемещения установлены соответственно каретка и суппорт, на носледних смонтированы гибочные головки в виде связанных между собой двумя зубчато-реечными передачами нолу1паблонов, а также установленную с возможностью возвратно-поступательного перемещения в направляющих, параллельных напраЕвляю10 щим суппорта, и связанную с ни.м плиту, снабжен платформой, смонтированными на плите направляющими колонками, рычажной системой и связываюнигм суипорт с плитой приводным фиксатором, па cyiuiopте выполнен кронштейн с yn() и отверстием, причем фиксатор размещен is мто.м отверстии, платформа устаиов.чспа пп поправляющих колонках и ciuiaaHa { ычажиой системой с фиксаторо.м.
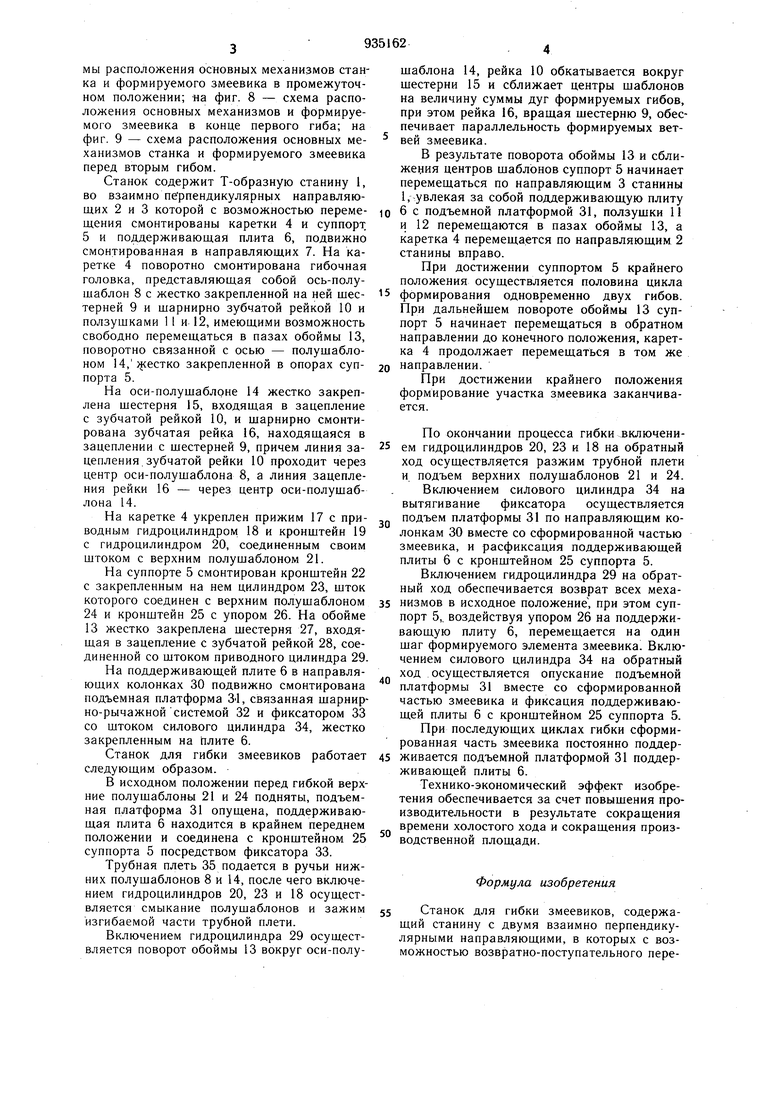
На фиг. 1 изображен станок, ooinnii вид.
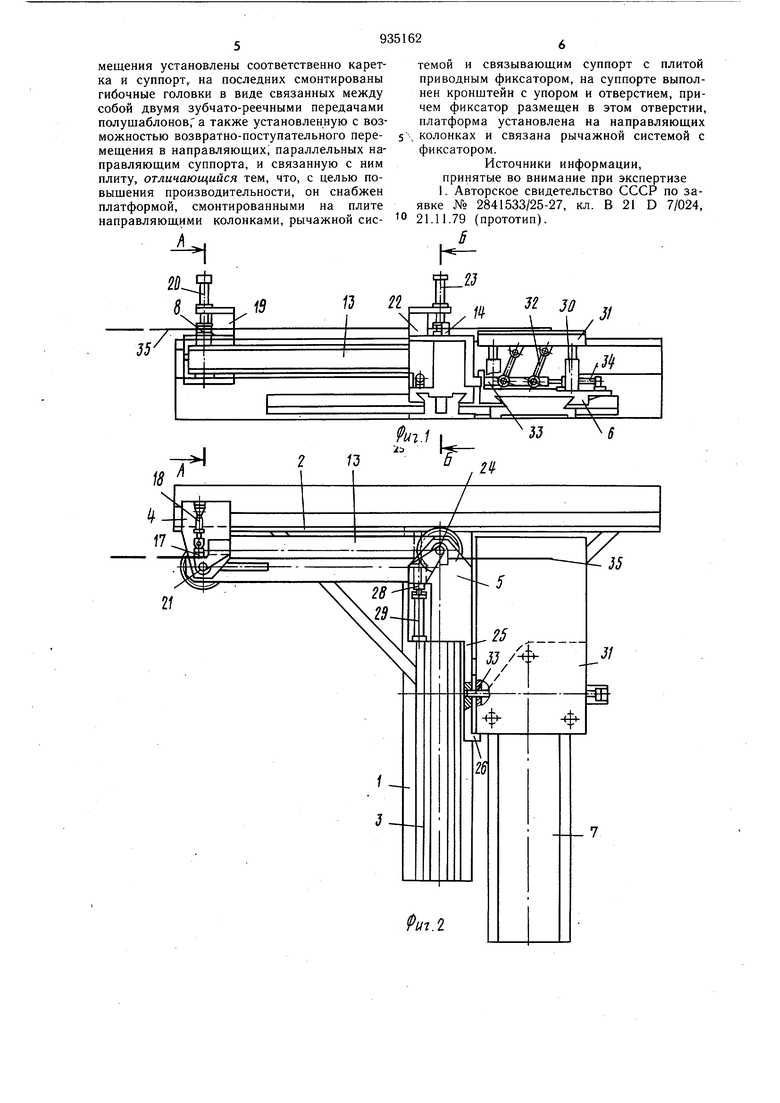
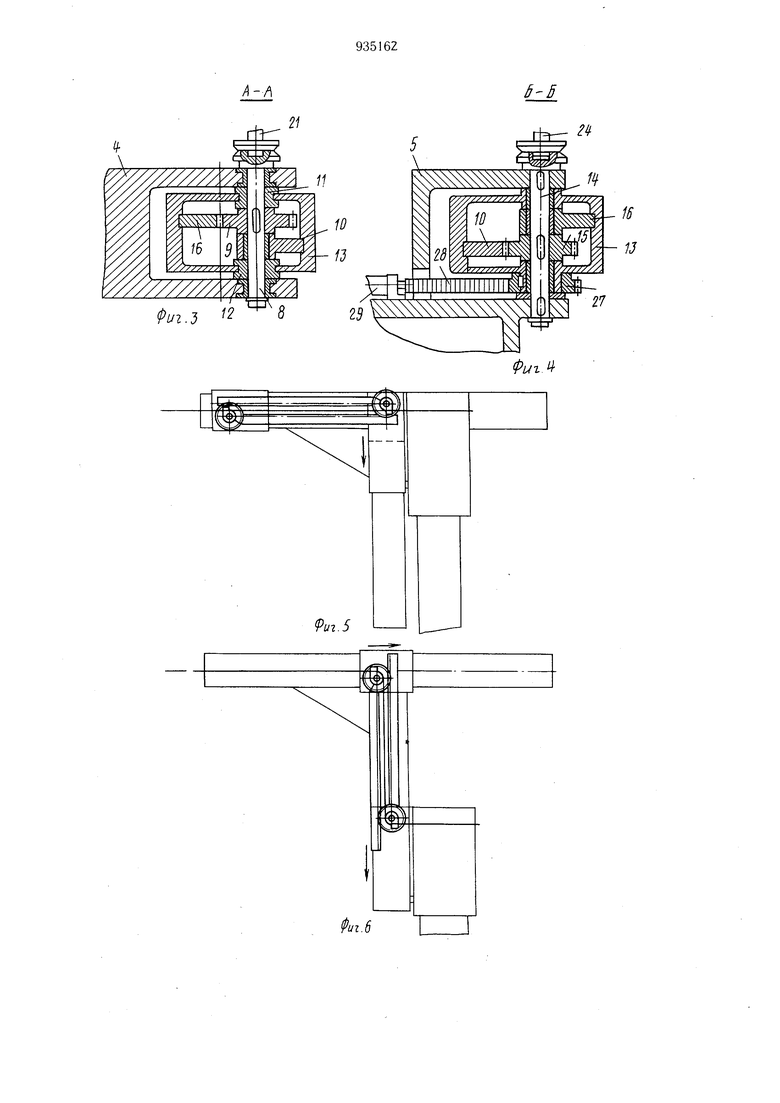
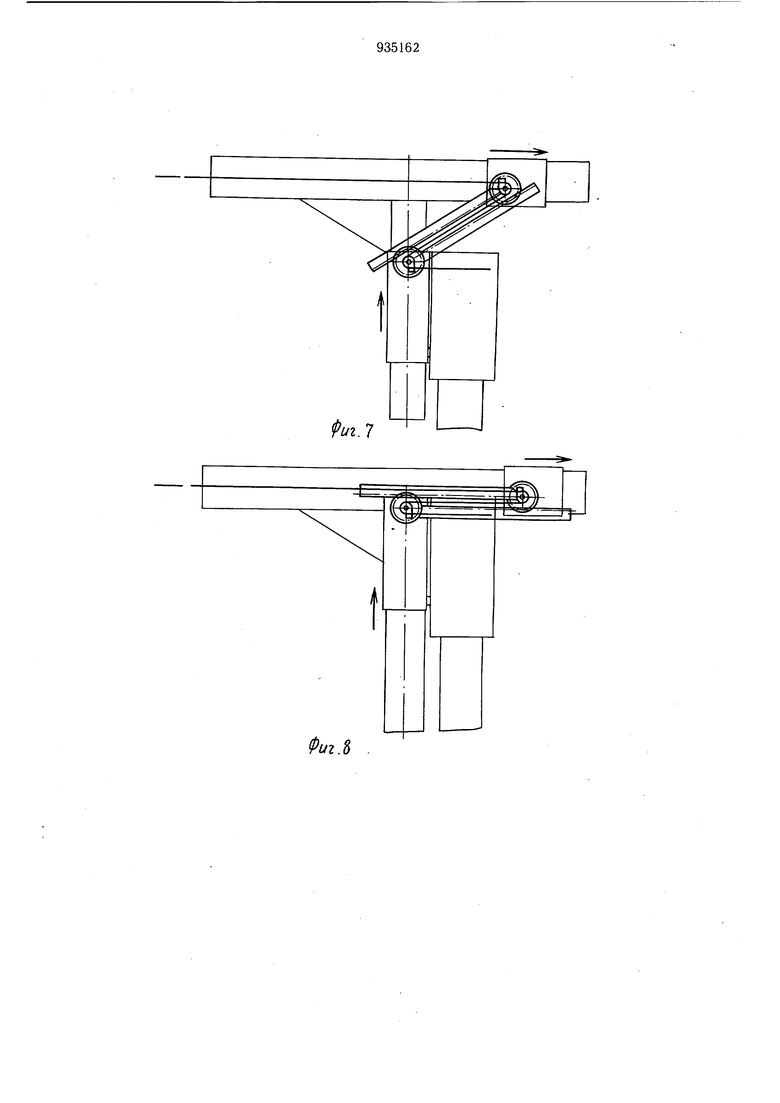
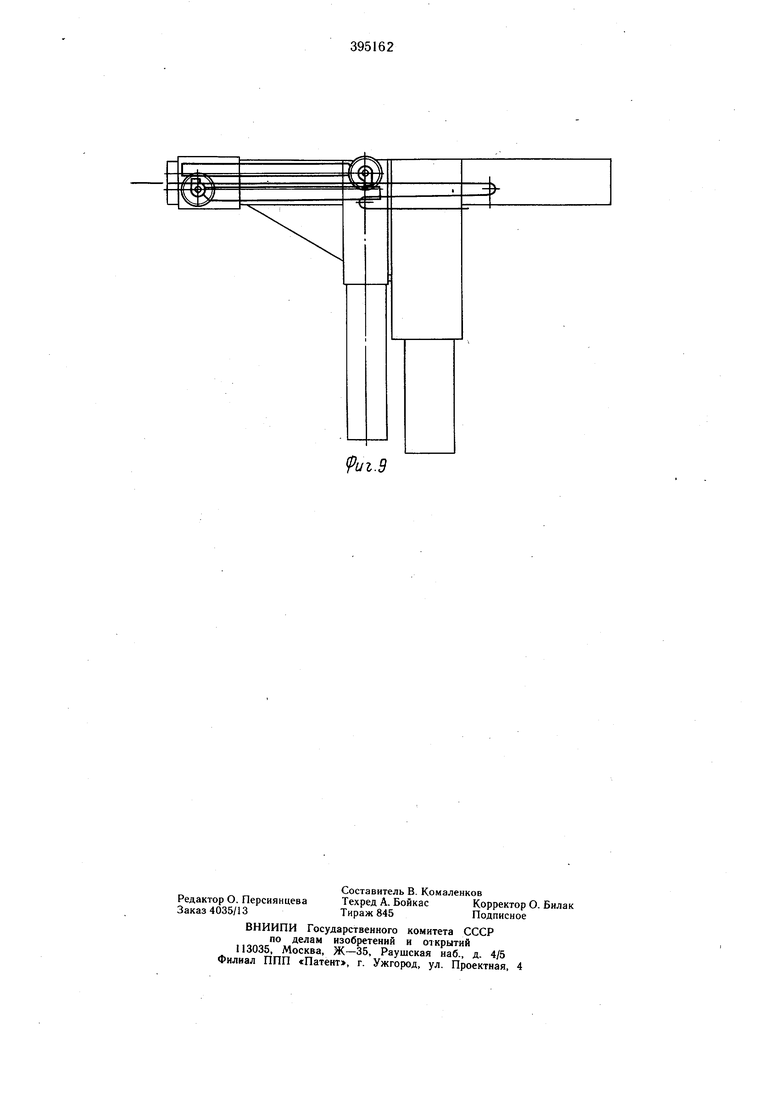
20 на фиг. 2 - то же, в плане; на фи1. Л разрез А- -А на фиг. 2; на фиг, 4 разрез Б - Б на фиг. 2; на фиг. 5 -- схема расно.южения основных механизмов станка и трубной плети перед гибкой; на фиг. 6 и 7 -- схемы расположения основных механизмов станка и формируемого змеевика в промежуточном положении; -на фиг. 8 - схема расположения основных механизмов и формируемого змеевика в конце первого гиба; на фиг. 9 - схема расположения основных механизмов станка и формируемого змеевика перед вторым гибом.
Станок содержит Т-образную станину 1, во взаимно перпендикулярных направляющих 2 и 3 которой с возможностью перемещения смонтированы каретки 4 и суппорт. 5 и поддерживающая плита 6, подвижно смонтированная в направляющих 7. На каретке 4 поворотно смонтирована гибочная головка, представляющая собой ось-полушаблон 8 с жестко закрепленной на ней шестерней 9 и шарнирно зубчатой рейкой 10 и ползушками 11 и 12, имеющими возможность свободно перемещаться в пазах обоймы 13, поворотно связанной с осью - полушаблоном 14,жестко закрепленной в опорах суппорта 5.
На оси-полушаблоне 14 жестко закреплена шестерня 15, входящая в зацепление с зубчатой рейкой 10, и шарнирно смонтирована зубчатая рейка 16, находящаяся в зацеплении с щестерней 9, причем линия зацепления, зубчатой рейки 10 проходит через центр оси-полушаблона 8, а линия зацепления рейки 16 - через центр оси-полушаблона 14.
На каретке 4 укреплен прижим 17 с приводным гидроцилиндром 18 и кронштейн 19 с гидроцилиндром 20, соединенным своим штоком с верхним полушаблоном 21.
На суппорте 5 смонтирован кронштейн 22 с закрепленным на нем цилиндром 23, шток которого соединен с верхним полушаблоном 24 и кронштейн 25 с упором 26. На обойме 13 жестко закреплена шестерня 27, входящая в зацепление с зубчатой рейкой 28, соединенной со штоком приводного цилиндра 29. На поддерживающей плите 6 в направляющих колонках 30 подвижно смонтирована подъемная платформа 31, связанная шарнирно-рычажной системой 32 и фиксатором 33 со штоком силового цилиндра 34, жестко закрепленным на плите 6.
Станок для гибки змеевиков работает следующим образом.
В исходном положении перед гибкой верхние полущаблоны 21 к 24 подняты, подъемная платформа 31 опущена, поддерживающая плита 6 находится в крайнем переднем положении и соединена с кронштейном 25 суппорта 5 посредством фиксатора 33.
Трубная плеть 35 подается в ручьи нижних полушаблонов 8 и 14, после чего включением гидроцилиндров 20, 23 и 18 осуществляется смыкание полушаблонов и зажим изгибаемой части трубной плети.
Включением гидроцилиндра 29 осуществляется поворот обоймы 13 вокруг оси-полушаблона 14, рейка 10 обкатывается вокруг шестерни 15 и сближает центры шаблонов на величину суммы дуг формируемых гибов, при этом рейка 16, вращая шестерню 9, обеспечивает параллельность формируемых ветвей змеевика.
В результате поворота обоймы 13 и сближеуия центров шаблонов суппорт 5 начинает перемещаться по направляющим 3 станины 1, увлекая за собой поддерживающую плиту
6 с подъемной платформой 31, ползушки 11 и 12 перемещаются в пазах обоймы 13, а каретка 4 перемещается по направляющим 2 станины вправо.
При достижении суппортом 5 крайнего положения осуществляется половина цикла
5 формирования одновременно двух гибов. При дальнейшем повороте обоймы 13 суппорт 5 начинает перемещаться в обратном направлении до конечного положения, каретка 4 продолжает перемещаться в том же
направлении.
При достижении крайнего положения формирование участка змеевика заканчивается.
По окончании процесса гибки включени5 ем гидроцилиндров 20, 23 и 18 на обратный
ход осуществляется разжим трубной плети
и, подъем верхних полушаблонов 21 и 24.
Включением силового цилиндра 34 на вытягивание фиксатора осуществляется подъем платформы 31 по направляющим колонкам 30 вместе со сформированной частью змеевика, и расфиксация поддерживающей плиты 6 с кронщтейном 25 суппорта 5.
Включением гидроцилиндра 29 на обратный ход обеспечивается возврат всех механизмов в исходное положение , при этом суппорт 5,. воздействуя упором 26 на поддерживающую плиту 6, перемещается на один шаг формируемого элемента змеевика. Включением силового цилиндра 34 на обратный ход осуществляется опускание подъемной платформы 31 вместе со сформированной частью змеевика и фиксация поддерживающей плиты 6 с кронштейном 25 суппорта 5.
При последующих циклах гибки сформированная часть змеевика постоянно поддерживается подъемной платформой 31 поддерживающей плиты 6.
Технико-экономический эффект изобретения обеспечивается за счет повышения производительности в результате сокращения времени холостого хода и сокращения производственной площади.
Формула изобретения
55 Станок для гибки змеевиков, содержащий станину с двумя взаимно перпендикулярными направляющими, в которых с возможностью возвратно-поступательного перемещения установлены соответственно каретка и суппорт, на последних смонтированы гибочные головки в виде связанных между собой двумя зубчато-реечными передачами полушаблонов, а также установленную с возможностью возвратно-поступательного перемещения в направляющих; параллельных направляющим суппорта, и связанную с ним плиту, отличающийся тем, что, с целью повыщения производительности, он снабжен платформой, смонтированными на плите направляющими колонками, рычажной системой и связывающим суппорт с плитой приводным фиксатором, на суппорте выполнен кронщтейн с упором и отверстием, причем фиксатор размещен в этом отверстии, платформа установлена на направляющих колонках и связана рычажной системой с фиксатором.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2841533/25-27, кл. В 21 D 7/024, 21.11.79 (прототип).
Риг.7
Фиг.Ь
